
CRU software instruction
 1 CRU Introduction
1 CRU Introduction
Compass Receiver Utility (CRU) is professional Windows-based configuration software developed by ComNav Technology. Using the CRU software, you can convert the original observation data (cnb) into Rinex format; configure the parameters of the static collection of the receiver (only the receiver of the K7 platform is supported, the receiver of the K8 platform needs to use webUI configuration); and you can view the satellites tracked by the receiver Status; download static data (only supported by some old models of T300 receivers).
2 CRU installation
Download and install CRU software from the link below (ensure the driver is properly installed in your PC): https://www.comnavtech.com/companyfile/4/
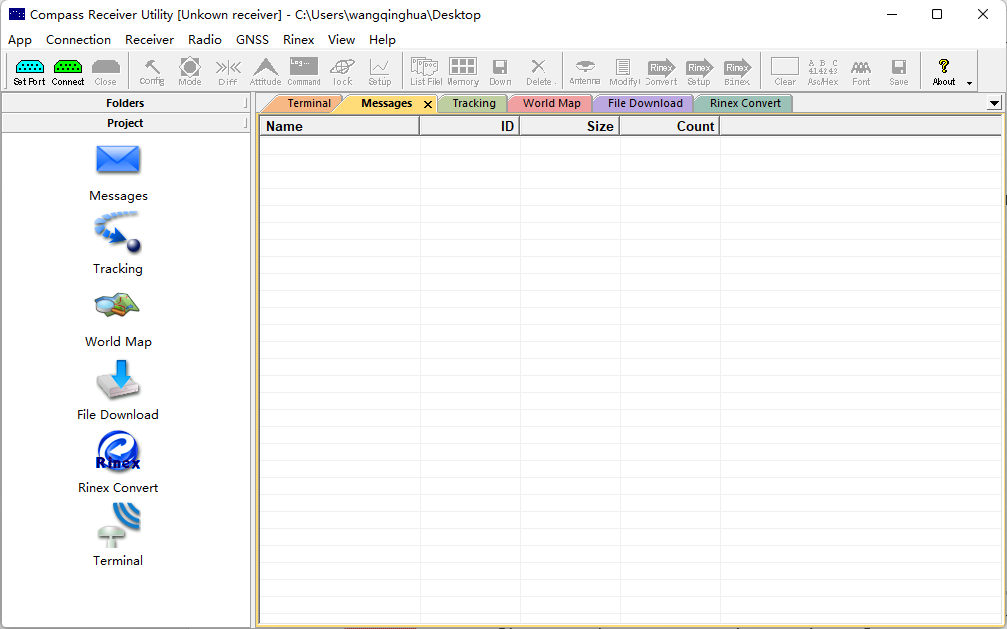
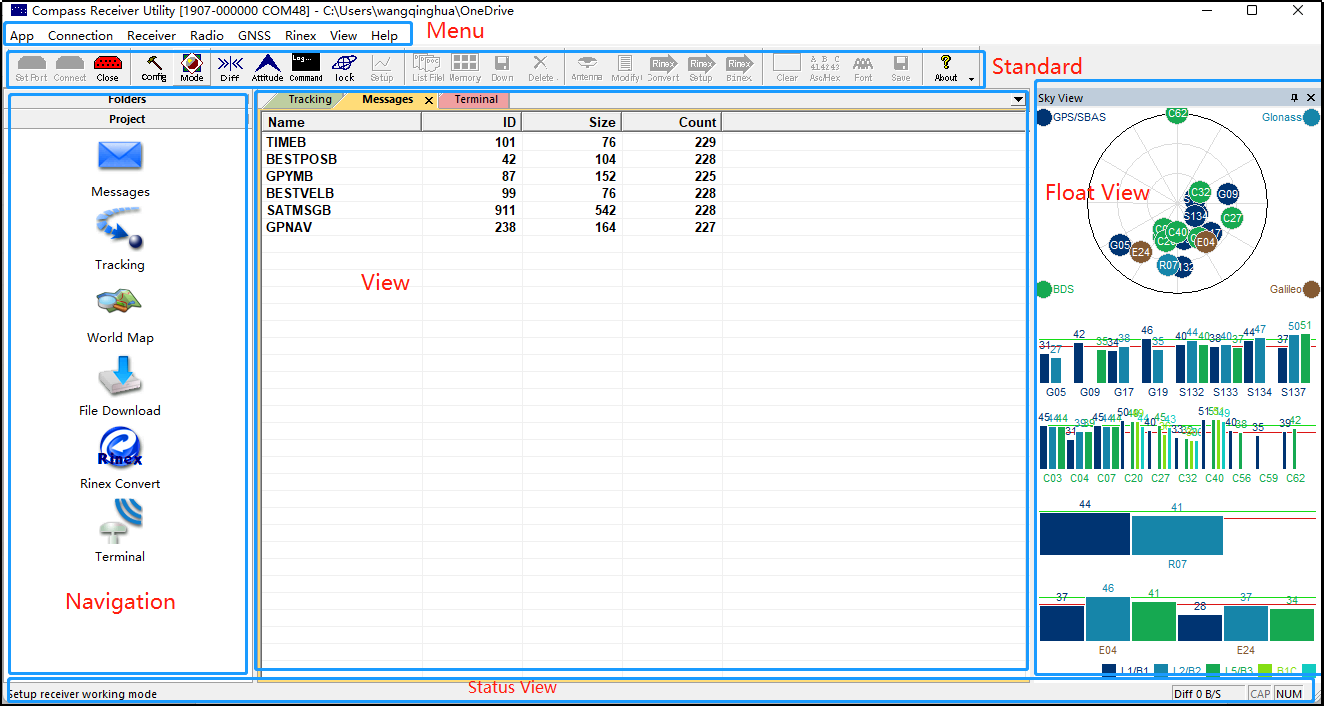
This section describes the user interface and main menus of Compass Receiver software.
ㆍ Menu Bar: contains all functional menus.
ㆍ Standard Toolbar: quick access the frequently used functions, including device connection, configuration, static data download, rinex convert, data log.
ㆍ View Area: the main display window.
ㆍ Navigation Pane: you can browse folders of your computer and check some main function of CRU software.
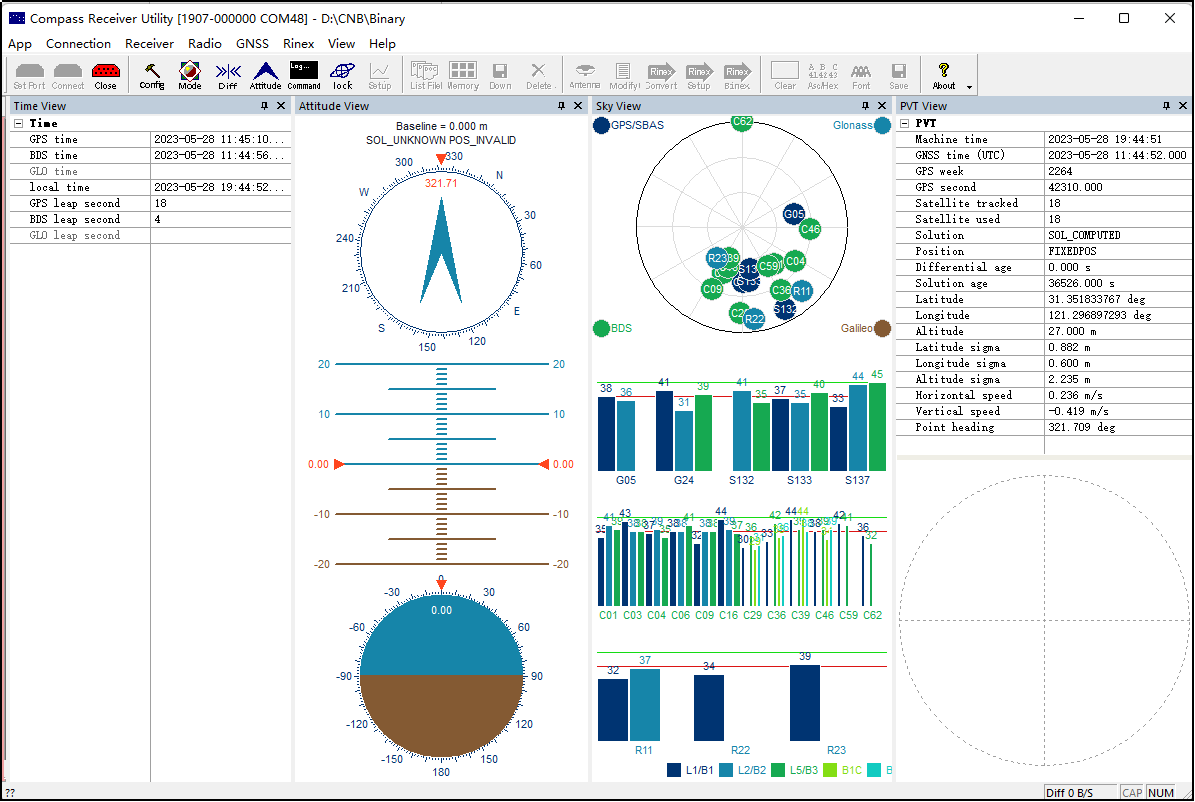
ㆍ Float window: shows the information of sky View, PVT View, Time View, go to menu Bar -> View to active float window.
ㆍ Status box: contains the display current cursor indication, differential data flow, etc.


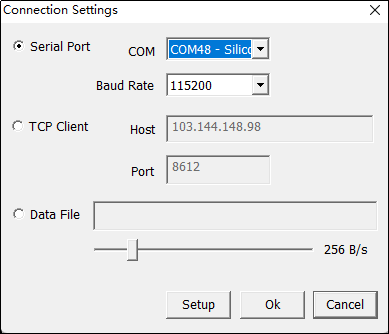
Connection setup supports three methods: Serial Port, TCP Client, and Data file reading, for OEM board, select Serial Port method.
Click Set port in the Standard bar or click Connection->Settings in the Menu bar, you will go to connection setup.
►Serial port: This is used to connect the com port of the receiver, you need to choose the proper baudrate (CRU supports 2400, 4800, 9600, 19200, 38400, 57600, 115200, 230400, 460800, 921600), click Setup->Connect or click OK directly to connect the OEM board, click Cancel to cancel Connection setup.
RTK, send the carrier phase collected by the base station to the user receiver, and calculate the coordinates by calculating the difference. RTK (Real-time differential positioning) is a measurement method that can obtain centimeter-level positioning accuracy in real time in the field, and its appearance has greatly improved the efficiency of field operations.
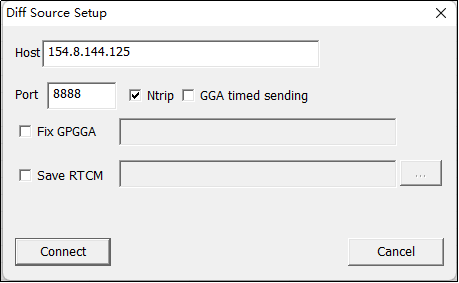
Generally, the OEM board is single status when it doesn’t receive differential corrections, if you want to set OEM board as rover and get differential corrections, you can click the Diff on the Standard Bar to set Diff source.
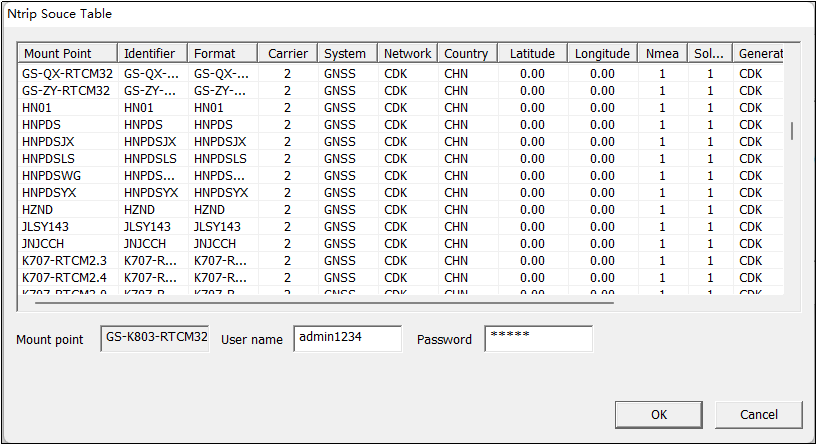
►Diff: This is used to receive the differential corrections to do RTK, enter the Host IP and port, check on Ntrip option, then click Connect to select one mountpoint.
►Save RTCM: You can save RTCM data from the differential screams while doing RTK.
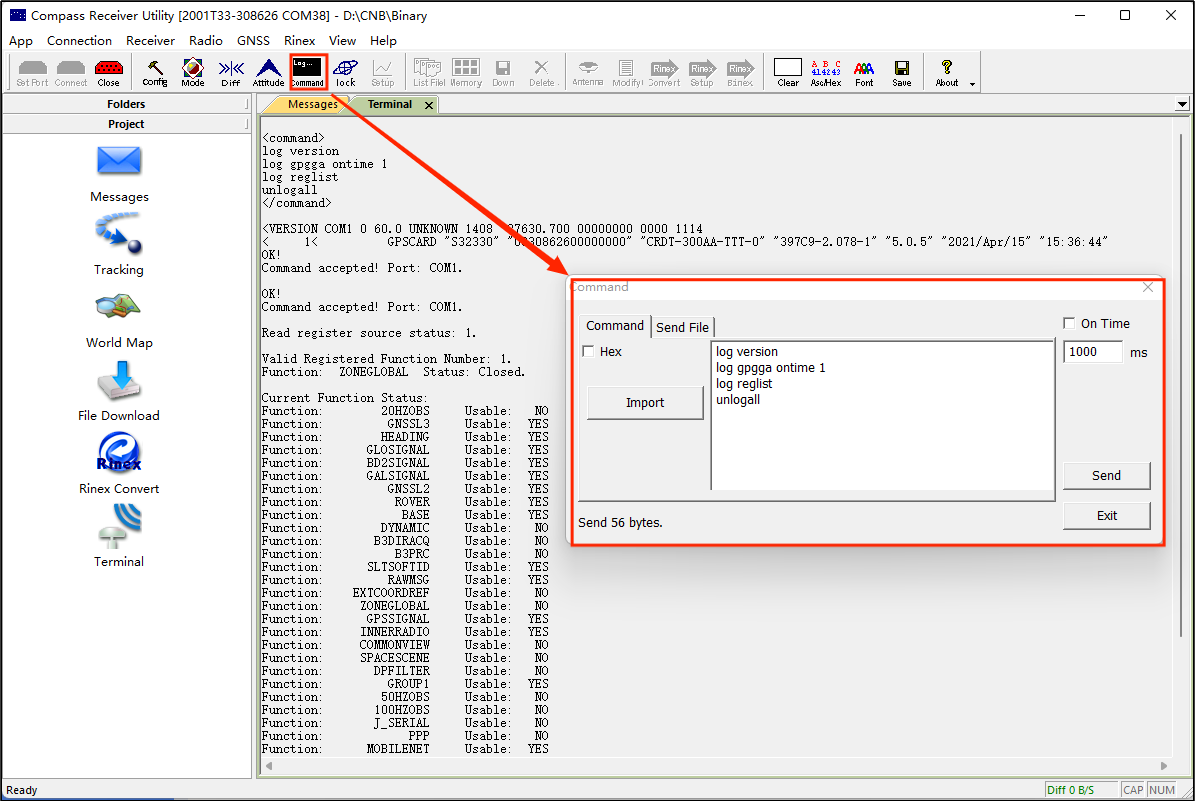
►Command: CRU software supports to enter commands manually, you can create a command file (*.txt, or *.bin format), click Import to import the command file, the commands will be listed in the Command view.
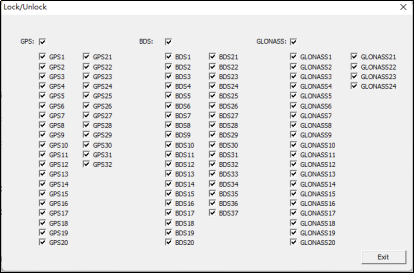
►Lock: When open Sky View in the float view, you will see all satellite constellations, you can disable or enable the whole satellite system or a specific satellite in Lock, the corresponding satellites will show in Sky View.
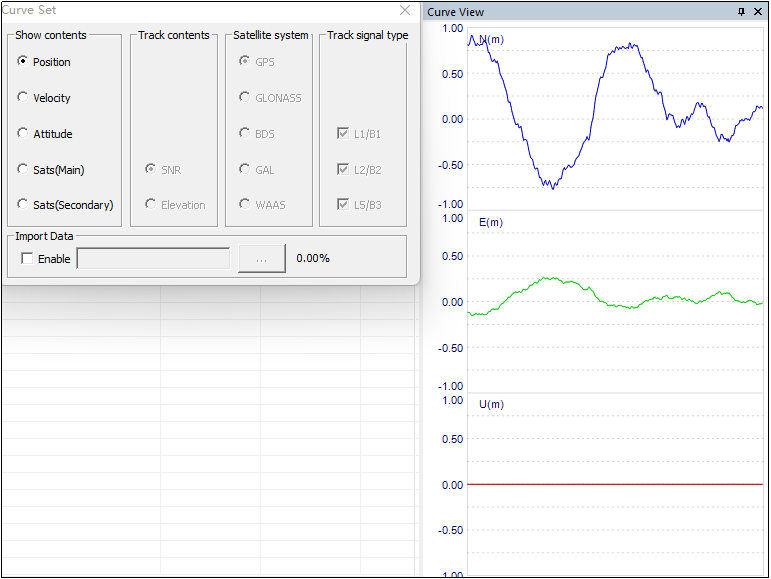
►Setup: Only Curve View is enabled, this setup will be highlighted and able to configure, you can check the Position, Velocity, Altitude, satellite SNR and elevation.
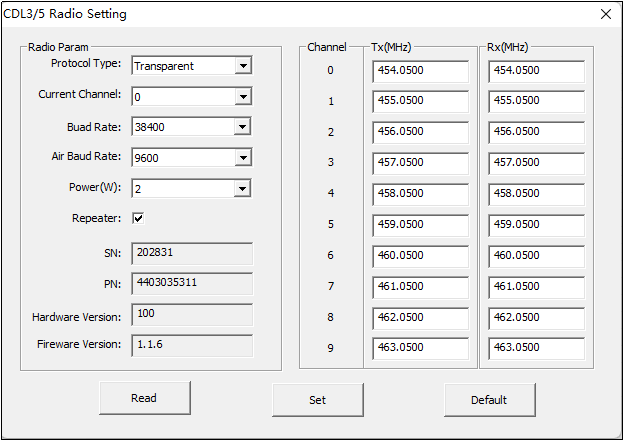
►CDL3/CLD5 settings: When CDL3/CDL5 is connected in CRU software, you can use Radio setting to configure the parameters, click Read to get the current parameters, Click Default to restore to the default parameters, after change the parameters, click Set to save the settings, the default setting is as below:
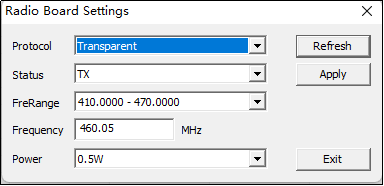
►T300: When receiver (K7 platform) is connected, you can use this option to setup radio work mode.
Protocol: Supports Transparent, TT450S(Trimble), MAC (Medium Access Control), South Survey;
Status: TX/RX, TX means transmit the correction, RX means receive the corrections;
Frequency range: 410-470MHz, 865-867 MHz;
Power: 0.5w, 1.0w, 2.0w;
Refresh: Click Refresh to get current radio work mode status;
Apply: After setup radio work mode, click Apply to save the settings.
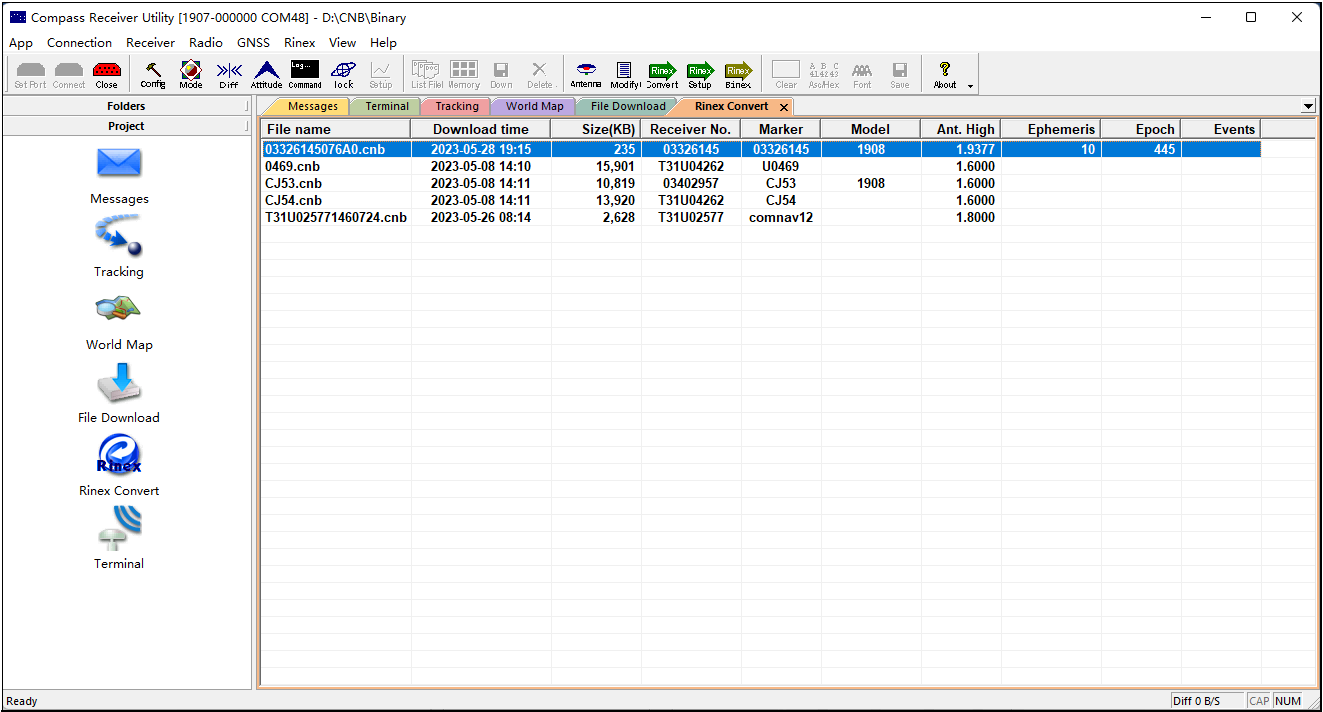
CRU software supports to convert CNB file to rinex format, click Rinex Convert in the Navigation bar or in the Menu bar, the Rinex part will be highlighted and able to setup.

The rinex convert steps are as below:
1. Click Folders to browse the static path;
2. Click Rinex Convert in the Project bar; select the cnb file which needs to convert;
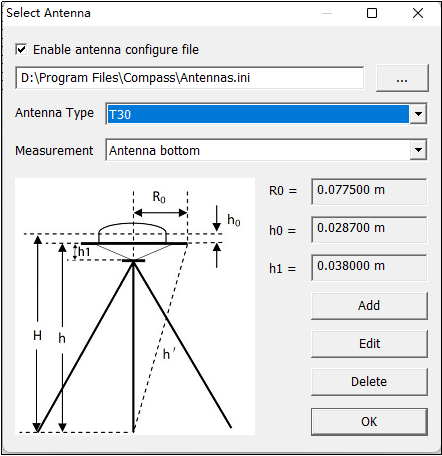
3. Click Antenna in the Standard bar, set antenna type and measurement method; You can add antenna parameters if you don‘t find the antenna you want.
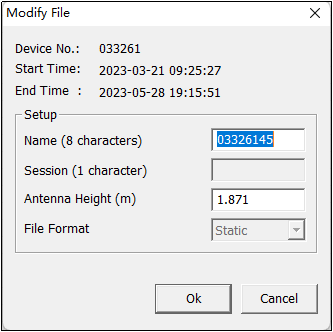
4. Click Modify in the Standard bar to set station name and antenna height;
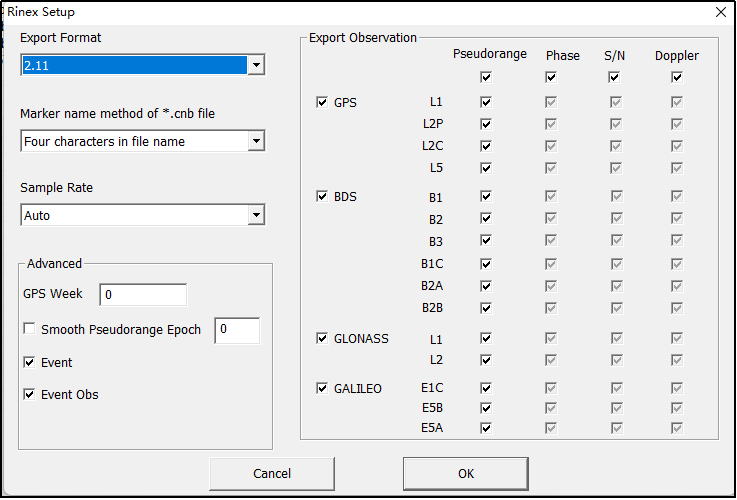
5. Click Rinex Setup in the Standard bar to choose rinex parameters:
Rinex type: supports rinex 2.01, 2.11, 3.01, 3.02, 3.03, 3.04.
Marker name method: Supports four characters in file name, full file name, NMEA + Day (3 character) + Session (1 character)
Sample rate: Auto (default), 1 second, 5 seconds, 10 seconds, 15 seconds, 30 seconds, 60 seconds.
Event/Event Obs: If you convert PPK (dynamic files), you need to check on these two options.
6. Click Rinex Convert in the Standard bar to convert cnb file to rinex file, the rinex files will be stored in the same path as cnb file.
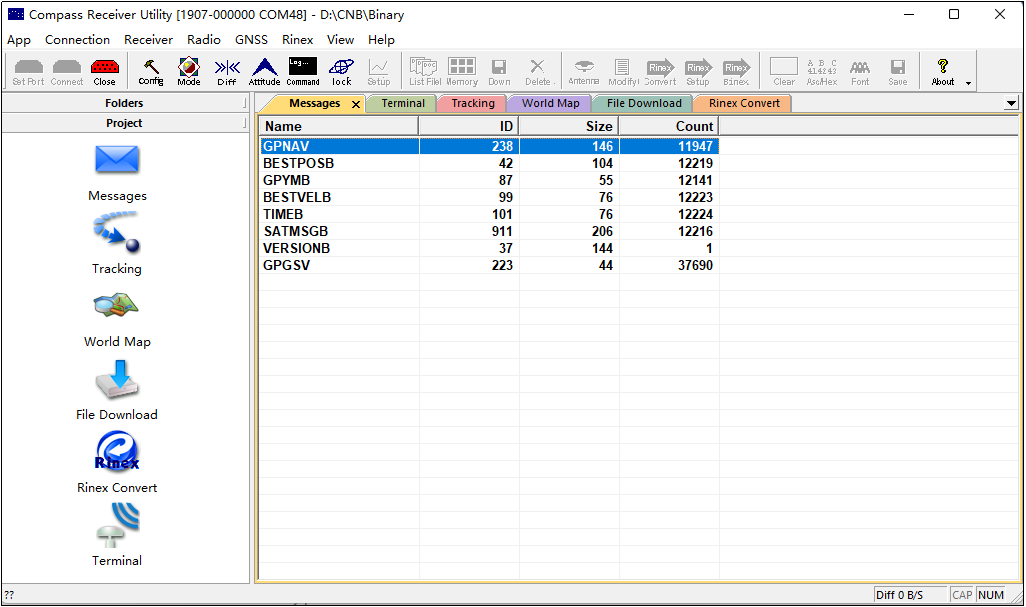
1.Messages
Click Messages to check current output messages of the receiver in the View area, if you send commands in Command, the corresponding messages will show in View area.
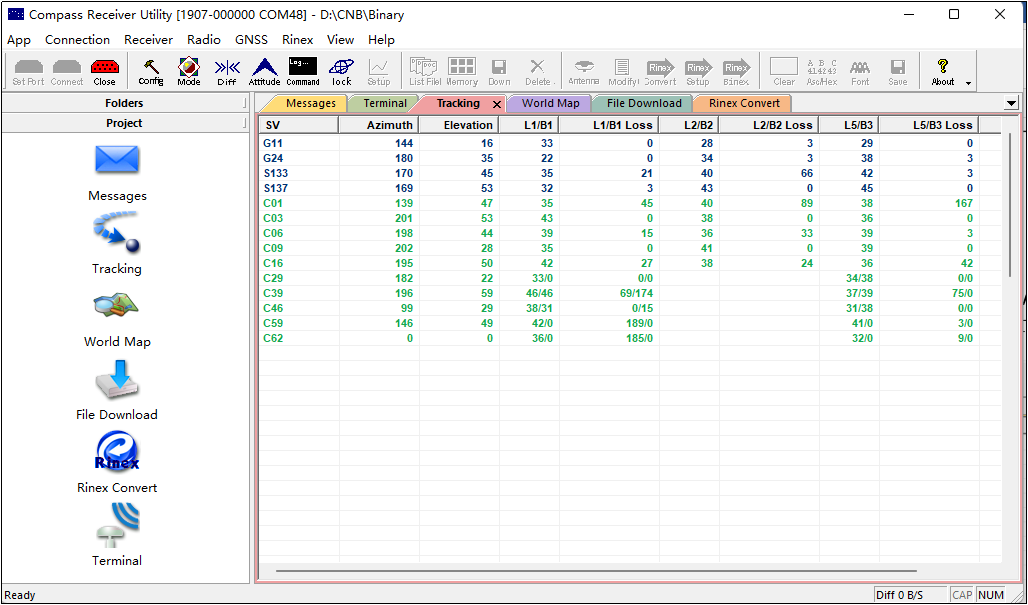
2. Tracking
Click Tracking to check current tracked satellites information, if you check Tracking view, when you go to Terminal page, there will be some messages output in View area, it is ephemeris in binary.
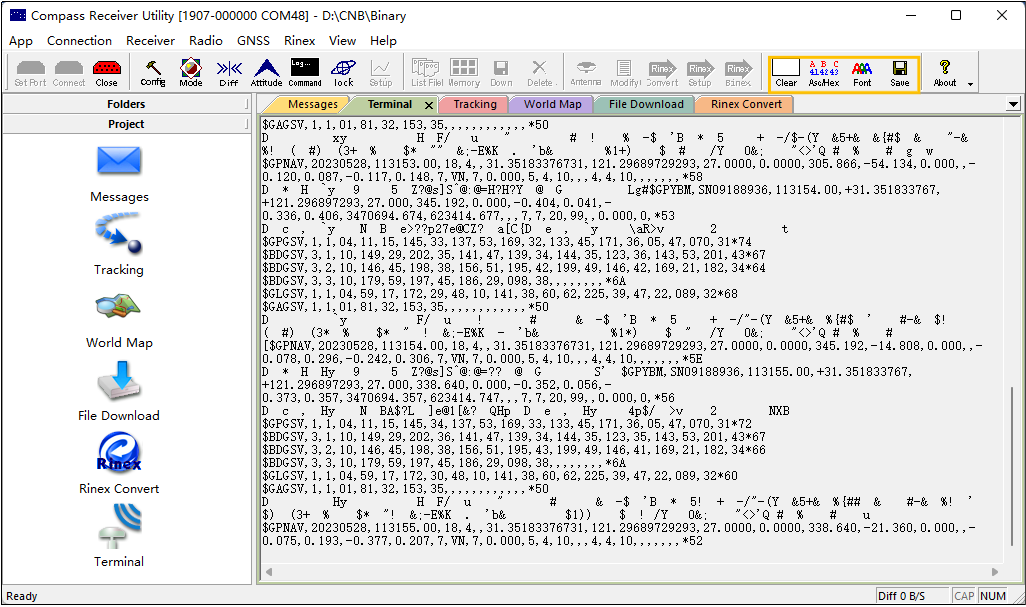
3. Terminal
Click Terminal to check current output messages details, and the data log will be highlighted and able to setup in the Standard bar.
ㆍ Clear: Clear all current output messages in the View bar;
ㆍ ASCII/HEX: Click to switch output messages between ASCII and HEX;
ㆍ Font: Change the display font of the output message;
ㆍ Save: Save a file about current output messages, when create a file, the Save button will be highlighted, it means the file is saving, click the Save button again to stop the file saving.
Click View in the Standard Bar to setup the float view, includes Sky View, Attitude View, PVT View, Time View, Curve View, Sky View Secondary.

About ComNav Technology
ComNav Technology develops and manufactures GNSS OEM boards and receivers for high precision positioning demanded applications. Its technology already been used in a wide range of applications such as surveying, construction, machine control, agriculture, intelligent transportation, precise timing, deformation monitoring, unmanned system. With a team dedicated for the GNSS technology, ComNav Technology is trying its best to supply reliable and competitive products to worldwide customers. ComNav Technology has been listed on the Shanghai Stock Exchange (Science and Technology Board), securities :ComNav Technology (Compass Navigation), Stock code: 688592.
About SinoGNSS®
SinoGNSS® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.
About ComNavTech®
ComNavTech® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.
About ComNav Technology
ComNav Technology develops and manufactures GNSS OEM boards and receivers for high precision positioning demanded applications. Its technology already been used in a wide range of applications such as surveying, construction, machine control, agriculture, intelligent transportation, precise timing, deformation monitoring, unmanned system. With a team dedicated for the GNSS technology, ComNav Technology is trying its best to supply reliable and competitive products to worldwide customers. ComNav Technology has been listed on the Shanghai Stock Exchange (Science and Technology Board), securities :ComNav Technology (Compass Navigation), Stock code: 688592.
About SinoGNSS®
SinoGNSS® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.
About ComNavTech®
ComNavTech® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.