
How to acquire positioning information with GNSS device?
GNSS, as a technology for spatial positioning based on signals from multiple satellites, has found widespread application across numerous critical fields, ranging from convenient navigation in daily life to complex and precise geographic surveying and mapping, aerospace control, and even emergency rescue and disaster monitoring. In these applications, the accuracy of location data is directly related to the precision of navigation, the rationality of decision-making, and the guarantee of safety.
So, how do we acquire the positioning messages from SinoGNSS K8 series OEM board and receiver.
In this blog, we will provide some commands to acquire positioning messages, which are as follows:
GPGGA BESTPOS BESTXYZ GPGLL GPYBM GPNAV GPRMC KSXT AGRIC DRONE
Below are detailed descriptions of above messages.
 1 GPGGA
1 GPGGA
GPGGA is the most commonly used standard NMEA message, which output not only position info, but also other info, such as solution status, the number of satellites involved in the solution, and GPS differential data age.
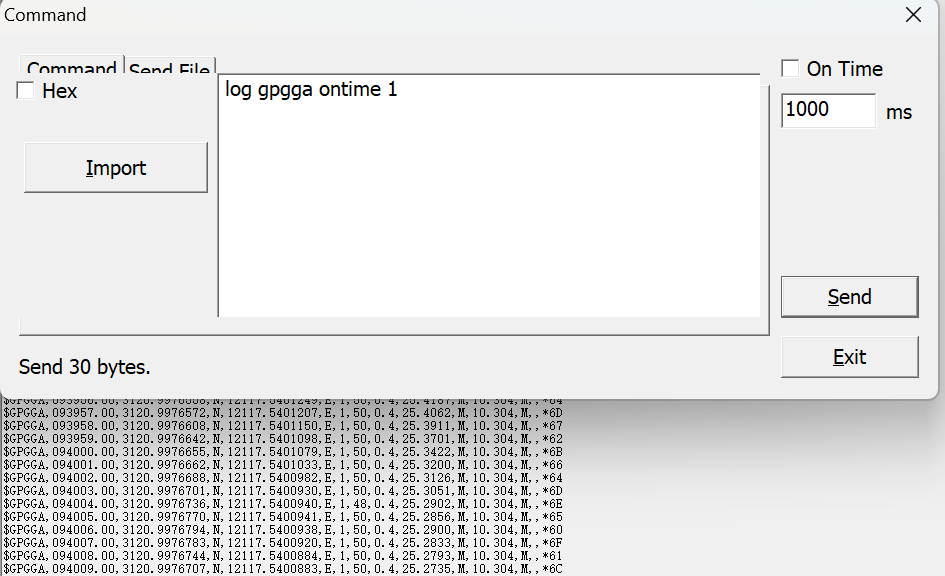
Fig.1 GPGGA message
Input command: log gpgga ontime 1
Standard GPGGA message format:
$GPGGA,024941.00,3110.4693903,N,12123.2621695,E,1,16,0.6,57.0924,M,0.000,M,99,AAAA*55Note: the header of GPGGA is always “GP”, regardless of whether other GNSS information is involved in solution computation. Specific message definitions can be found in the command manual.
2 BESTPOS
BESTPOS message includes the best available GNSS position calculated by the board (in meters). It also contains the differential age, which is used to predict anomalies caused by interruptions in differential corrections.
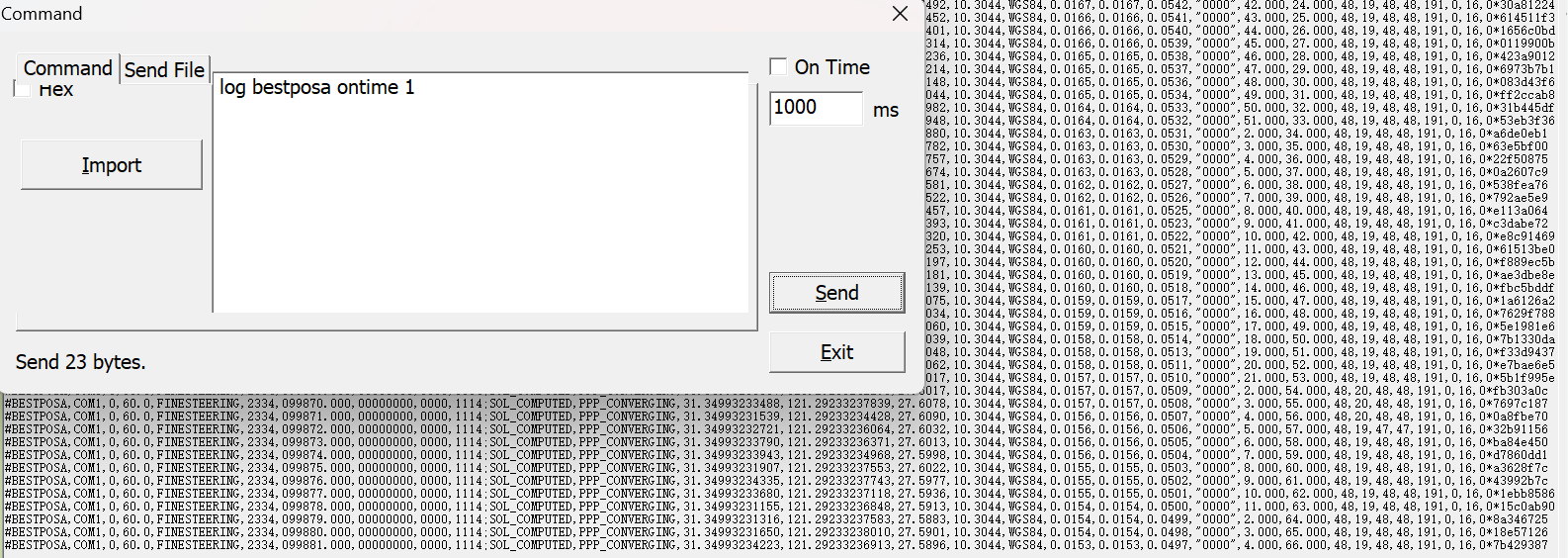
Fig.2 BESTPOS message
Input command: log bestposa ontime 1
Standard BESTPOS message format:
#BESTPOSA,COM1,0,60.0,FINESTEERING,2334,035920.000,00000000,0000,1114;SOL_COMPUTED,SINGLE,31.34996188165,121.29233806612,23.8906,10.3044,WGS84,0.2110,0.1918,1.3080,"",0.000,271.000,51,51,51,51,223,0,0,25*aa24ca3c 3 BESTXYZ
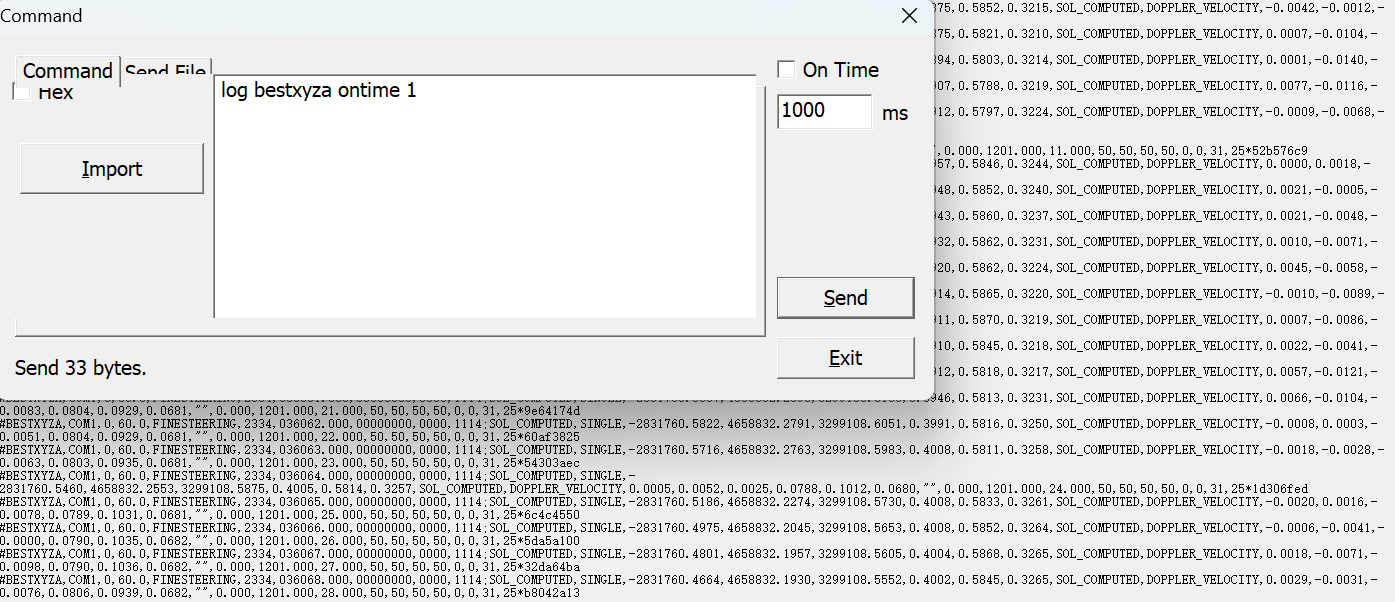
BESTXYZ message includes the receiver's best position and velocity in ECEF coordinates.
![]()
Fig.3 BESTXYZ message
Input command: log bestxyza ontime 1
Standard BESTXYZ message format:
#BESTXYZA,COM1,0,60.0,FINESTEERING,2222,378599.000,00000000,0000,1114;SOL_COMPUTED,NARROW_INT,- 2831765.8413,4658833.3032,3299109.2852,0.0079,0.0094,0.0078,SOL_COMPUTED,DOPPLER_VELOCITY,0.0014,0.0001,- 0.0018,0.0033,0.0041,0.0034,"0008",0.000,1.000,10.000,46,40,46,46,0,0,0,203*f94f1bd1
4 GPGLL
GPGLL is a standard NMEA message that includes essential information such as time, latitude, and longitude. This message is shorter than GPGGA and can also output data status and the positioning system mode indicator.
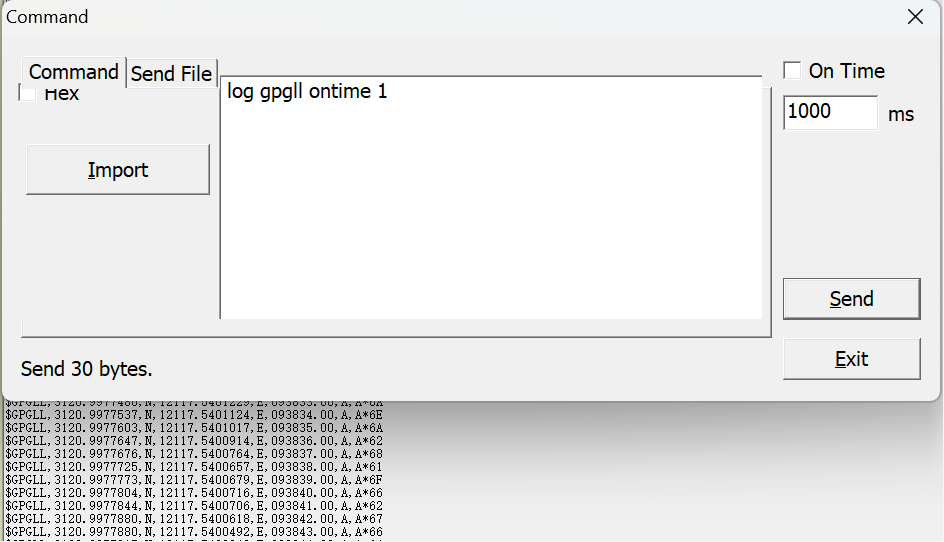
Fig.4 GPGLL message
Input command: log gpgll ontime 1
The standard GPGLL message is as follows, the position message is the same as GPGGA:
$GPGLL,3110.4705303, N,12123.2635741,E,031544.00,A,A*68 5 GPYBM
GPYBM is a non-standard message, which includes position, velocity, and PJK information. The information output by this message is more comprehensive compared to GPGGA, as it can provide heading and pitch angle in dual-antenna mode.
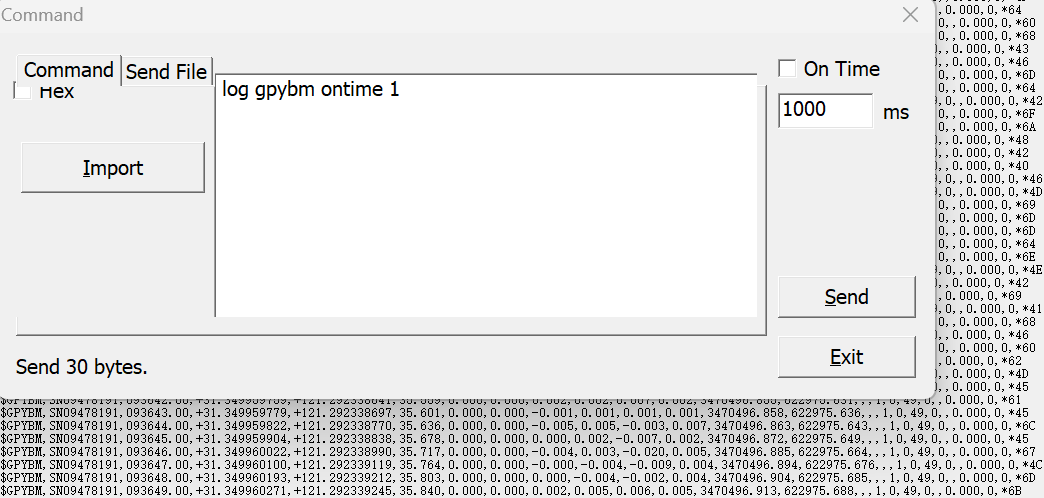
Fig.5 GPYBM message
Input command: log gpybm ontime 1
Standard GPYBM message format:
$GPYBM,SN00520429,070326.00,+31.170243388,+121.398934274,15.286,346.840,1.290,0.000,-0.002,0.003,0.002,3449917.897,538032.213,-451.861,1088.741,4,4,12,1,,,,*4BNote: '+' represents north or eastward direction, ‘-' represents south or westward direction.
6 GPNAV
GPNAV is a non-standard message, which includes position, velocity, position and tracking information, and also heading, pitch and roll (reserved) angles output when dual antennas are used. This message is primarily used to output relevant information during navigation.
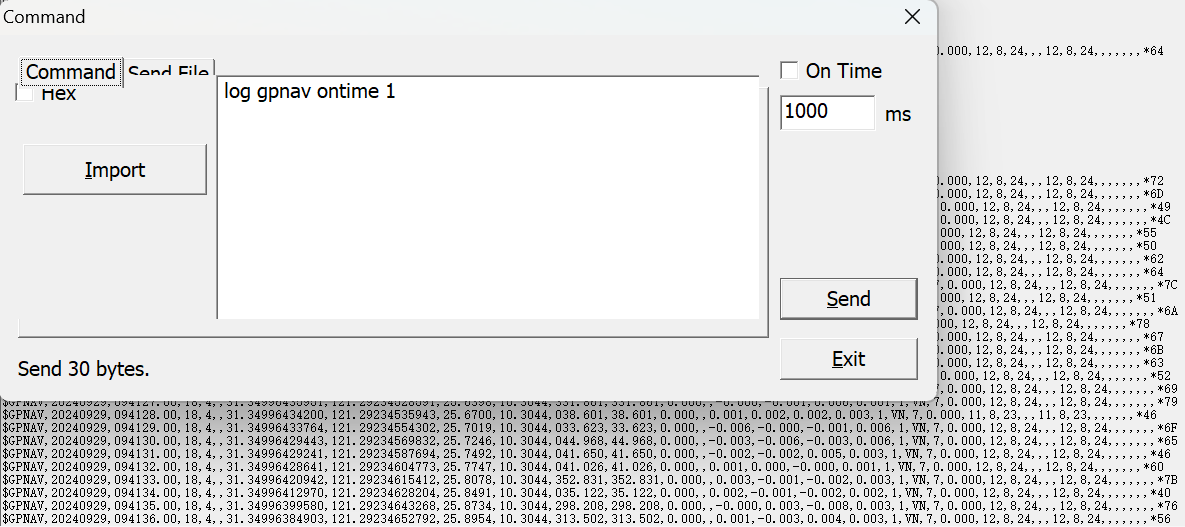
Fig.6 GPNAV message
Input command: log gpnav ontime 1
Standard GPNAV message format:
$GPNAV,20151003,123707.00,17,3,,31.17432494563,121.38795557,41.7907,10.7811,176.628,0.000,0.000,,0.000,-0.002,-0.010,0.002,1,NN,7,0.000,8,5,9,,,8,5,9,,,,,,,*6FNote: '+' represents north or eastward direction, ‘-' represents south or westward direction.
7 GPRMC
GPRMC is a standard NMEA message, which includes time, position, speed and real heading angle.
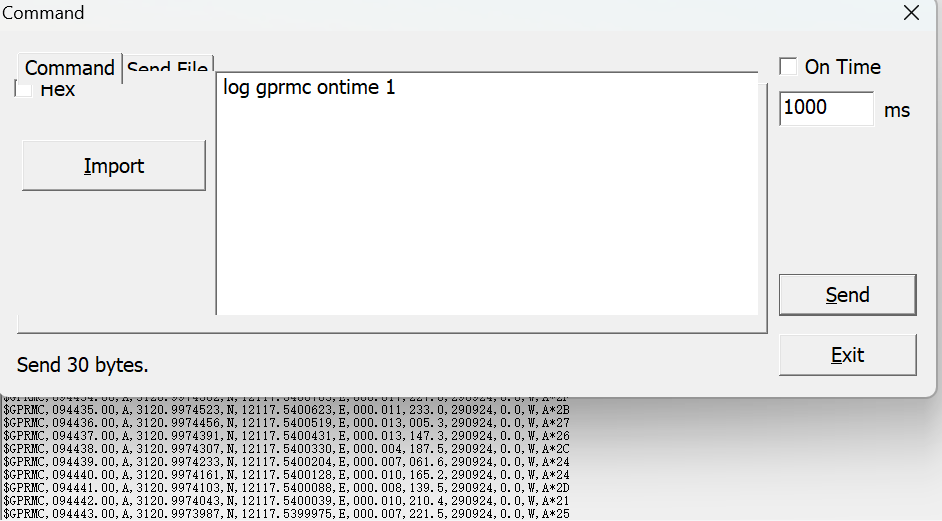
Fig.7 GPRMC message
Input command: log gprmc ontime 1
Standard GPRMC message format:
$GPRMC,074539.00,A,3120.9969570,N,12117.5424237,E,000.004,133.5,120822,10.0,W,D*1C 8 KSXT
KSXT message contains time, position, localization and orientation -related data of the GNSS receiver. In addition, it can also output values for evaluating the health of the master-slave antenna carrier-to-noise ratio.
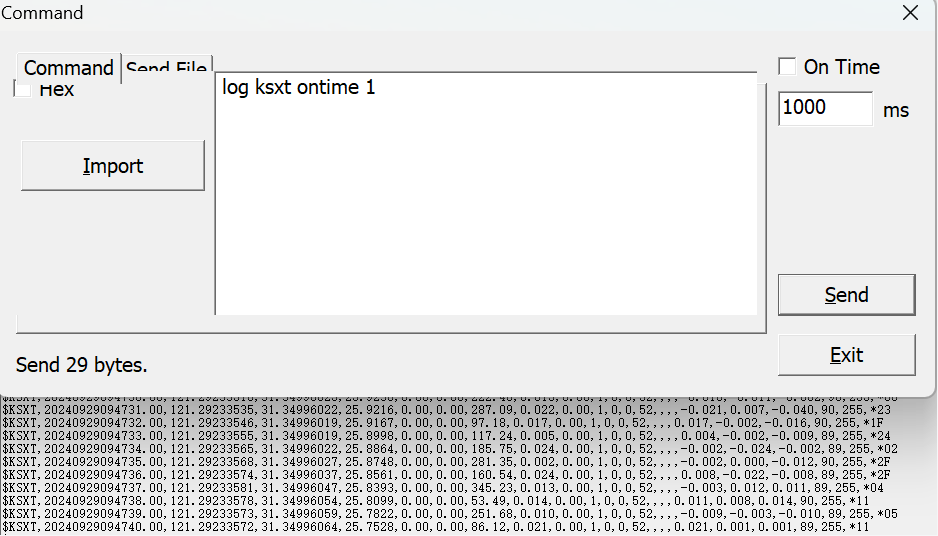
Fig.8 KSXT message
Input command: log ksxt ontime 1
Standard KSXT message format:
$KSXT,20210906104914.00,121.29239578,31.34996850,33.3672,276.66,43.34,83.17,0.102,0.00,1,3,39,42,,,,0.101,0.012,0.143,95,94,*21 9 AGRIC
Compared to the previously mentioned messages, AGRIC message provides very detailed information, including position, velocity, baseline orientation vector, and standard deviations.
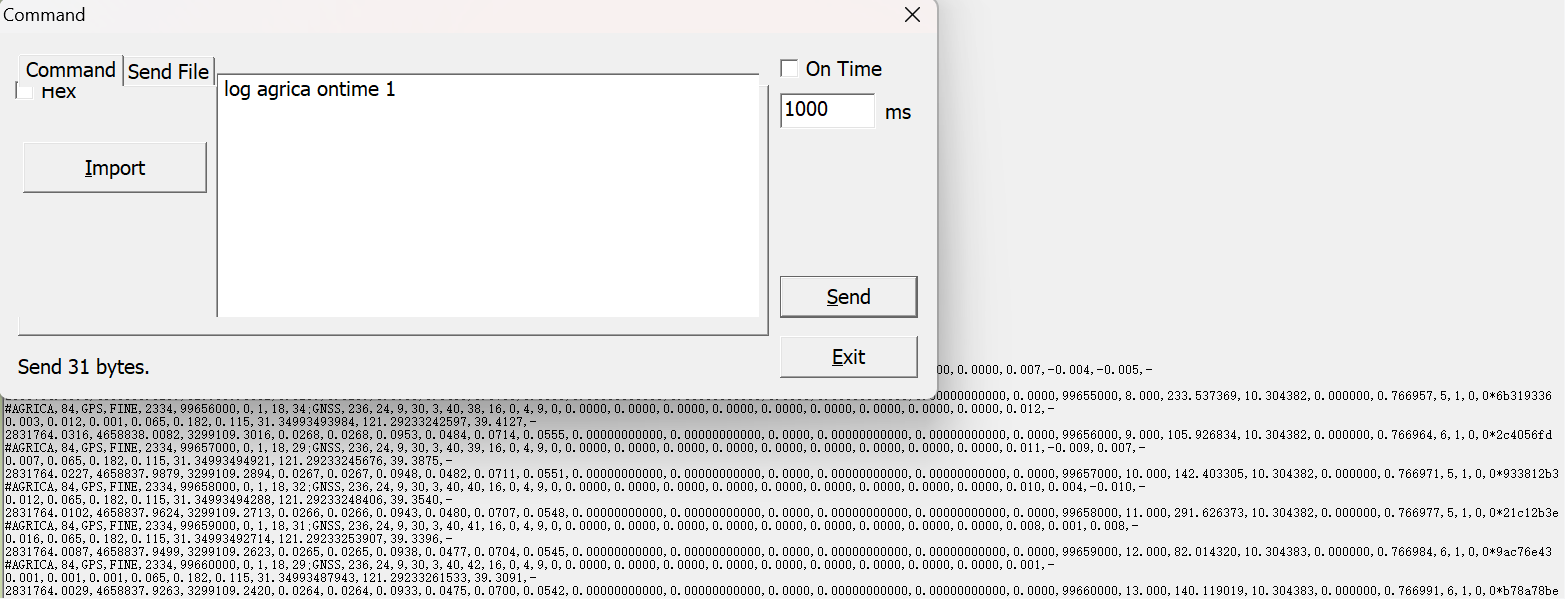
Fig.9 AGRIC message
Input command: log agrica ontime 1
Standard AGRIC message format:
#AGRICA,35,GPS,FINE,2223,283006000,0,1,18,27;GNSS,236,22,8,17,6,36,28,4,4,14,21,0,-7782.5864,-2000.3002,8.4380,0.0046,0.0056,0.0041,243.0610,-0.2899,0.0000,0.013,-0.010,0.008,-
0.012,0.013,0.015,0.012,31.34996227620,121.29240322121,36.6529,- 2831767.7449,4658831.1477,3299110.4542,0.0194,0.0194,0.0280,0.0043,0.0053,0.0039,31.42015535053,121.31342487993,23.1344,31.34994264898,121.29236881723,42.6828,283006000,1.000,139.352203,10.304612,2.753604,0.717130,0,0,0,0*acab1bc9
10 DRONE
DRONE message displays real-time status information for the dual-antenna system, including the satellite tracking status and operation states of both the master and slave antennas, the position and speed of the master antenna, and related accuracy data.
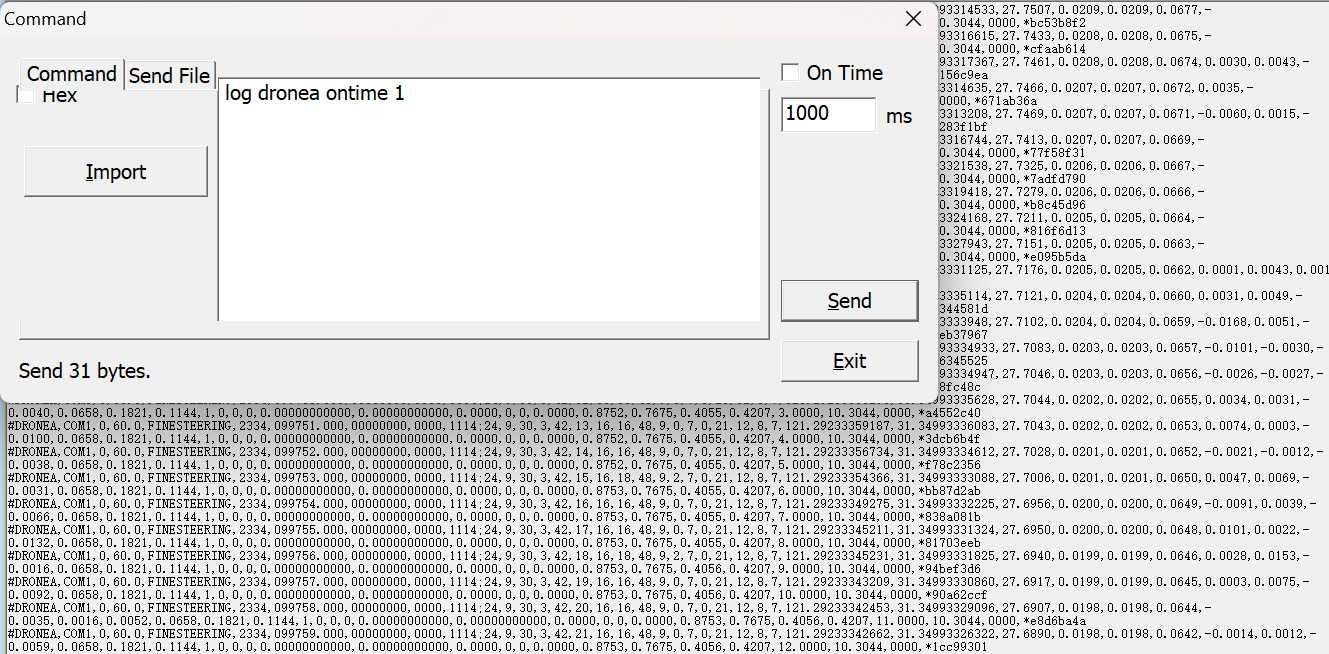
Fig.10 DRONE message
Input command: log dronea ontime 1
Standard DRONE message format:
#DRONE,COM1,0,60.0,FINESTEERING,2263,267570.000,00000000,0000,1114,23,5,24,2,19,12,1,45,45,21,12,7,5,21,12,7,5,121.29169275851,31.35089750559,27.8769,0.3036,0.3035,1.4278,0.0006,-
0.0006,0.0146,0.0165,0.0024,0.0036,1,1,45,45,121.29162252337,31.35088292530,28.8125,1,4,248.7460,1.0419,0.8830,0.4550,0.5530,0.0000,10.3014,4096,*4ff8b7c6
NOTE: Detailed message definitions can be found in the OEM manual.
About ComNav Technology
ComNav Technology develops and manufactures GNSS OEM boards and receivers for high precision positioning demanded applications. Its technology already been used in a wide range of applications such as surveying, construction, machine control, agriculture, intelligent transportation, precise timing, deformation monitoring, unmanned system. With a team dedicated for the GNSS technology, ComNav Technology is trying its best to supply reliable and competitive products to worldwide customers. ComNav Technology has been listed on the Shanghai Stock Exchange (Science and Technology Board), securities :ComNav Technology (Compass Navigation), Stock code: 688592.
About SinoGNSS®
SinoGNSS® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.
About ComNavTech®
ComNavTech® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.