Galileo High Accuracy Service (HAS) Performance Analysis Report
 Introduction
Introduction

Fig.1 Comparison of PPP-HAS positioning and RTK positioning results of Belgium site
This report focuses on the precision of the correction information provided by HAS, and uses SinoGNSS self-developed PPP-HAS program to evaluate the positioning performance of domestic and foreign measured data.

1 Data and method
This report utilizes self-developed receivers from SinoGNSS for data collection. The data collection environment mainly in open sky. The tests was done over the globe, select some typical countries to analyse the performance in different location. It includes fours sites in China, and one site in Africa, South America, North America and Europe respectively. Multiple-station data undergoes continuous multi-day PPP testing for evaluation.

Fig.3 Test environment
The observation data used to evaluate the HAS service performance of the Galileo satellite navigation system come from data from 4 cities in China and 4 overseas countries. The specific site name distribution and the time of the samples displayed in the article are shown in Table 1.
| Sampling Location | Latitude | Longitude | Data Sampling Statistics Date | Report Image Display Date |
|---|---|---|---|---|
| China-Shanghai (Asia) | 31.35°N | 121.29°E | 2023/09/01 - 2023/10/08 | 09/28 10:30-21:20 (static) 09/18, 09/22 (dynamic) |
| China-Beijing (Asia) | 39.98°N | 116.41°E | 2023/10/17 - 2023/11/05 | 11/06 01:00-24:00 |
| China-Guangzhou (Asia) | 23.18°N | 112.42°E | 2023/12/02 - 2023/12/04 | 12/04 00:00-15:20 |
| China-Xinjiang (Asia) | 44.57°N | 86.62°E | 2023/10/17 - 2023/10/26 | 10/23 01:00-22:30 |
| Uganda (Africa) | 0.4150°N | 32.59°E | 2023/03/22 - 2023/03/26 | 03/22 16:30-00:00 |
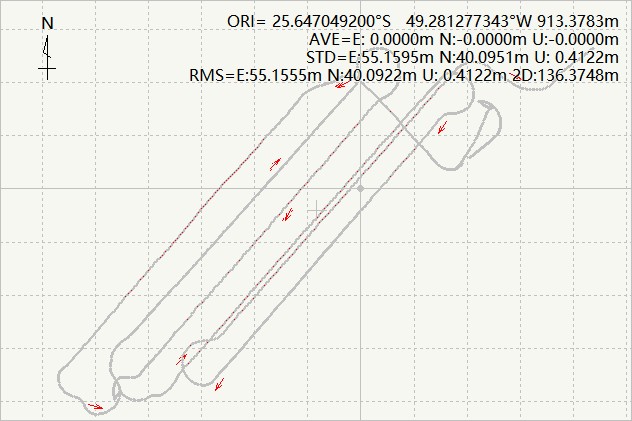
| Brazil (South America) | 25.49°S | 49.22°W | 2023/03/27 | 03/27 12:00-20:00 |
| Belgium (Europe) | 50.35°N | 4.892°E | 2023/03/16 | 03/16 19:30-03/17 10:00 |
| Canada (North-America) | 53.60°N | 113.92°W | 2023/12/13 | 12/13 00:00-04:00 |
Table 2 shows the processing methods of ambiguity, clock bias and other related parameters in the positioning process.
| Main Parameters | Solution Strategy |
|---|---|
| Observations | Ionosphere-free combined pseudo-range and carrier wave observations |
| Sampling Rate | 1Hz |
| Phase wrapping | Model correction |
| Solid earth tide, ocean tide | Model correction |
| Parameter estimation method | Robust Kalman Filter |
| Ionospheric delay | Ionospheric-free combined elimination |
| Ambiguity | Parameter Estimation |
| Tropospheric delay | Parameter Estimation |
| Satellite clock bias, orbit | Using Galileo HAS products |
| Cycle slip detection | Melbourne-Wübbena combination and geometric distance-free combination |
When using PPP-HAS for positioning, the basic observation equation of pseudorange and carrier wave is:
\( P_i = \rho_i + I_i + T + cdt_{r} - cdt^s - c(B_{r} + B^s) + \epsilon_{P} \) (Eq.1)
\( \Phi_i = \rho_i - I_i + T + cdt_{r} - cdt^s - c(b_{r} + b^s) + \lambda_i N_i + \epsilon_{\Phi} \) (Eq.2)
P represents the pseudo-range observation value, Φ represents the carrier observation value, λ represents the carrier phase wavelength, i represents that the error is related to the frequency of the signal, ρ represents the geometric distance between the satellite and the receiver, dtr and dts are the receiver clock bias and satellite clock bias respectively, I represents the ionospheric delay, T represents the tropospheric delay, Br, and Bs respectively represent the receiver-side hardware delay and satellite-side hardware delay of the pseudo-range part, br and bs respectively represent the receiver-side hardware delay and satellite-side hardware of the carrier part, N is the integer ambiguity of the carrier phase signal in cycles, ξ represents observation noise and other errors not modeled. When performing PPP positioning, establish an ionosphere-free combined model according to Eq. 3 and Eq. 4.
\( P_{IF} = \frac{f_1^2 P_1 - f_2^2 P_2}{f_1^2 - f_2^2} = \rho + cdt_{r} - cdt^{s} + T + \epsilon_{P_{IF}} \) (Eq.3)
\( \Phi_{IF} = \frac{f_1^2 \Phi_1 - f_2^2 \Phi_2}{f_1^2 - f_2^2} = \rho + cdt_{r} - cdt^{s} + T + \lambda_{IF} N_{IF} + \epsilon_{\Phi_{IF}} \) (Eq.4)
Eq. 3 and Eq. 4 are the ionospheric-free combined observation equations. The ionospheric-free combined combination model can eliminate the influence of the first-order ionosphere. The parameters to be estimated only include 3 position parameters, receiver clock bias, zenith tropospheric delay and combined carrier phase ambiguity. After establishing the model, domestic and foreign base stations are selected to receive satellite observation data and HAS data, and the relevant parameters are processed according to Table2. Fig.4 is used to verify the ionosphere-free precise positioning.
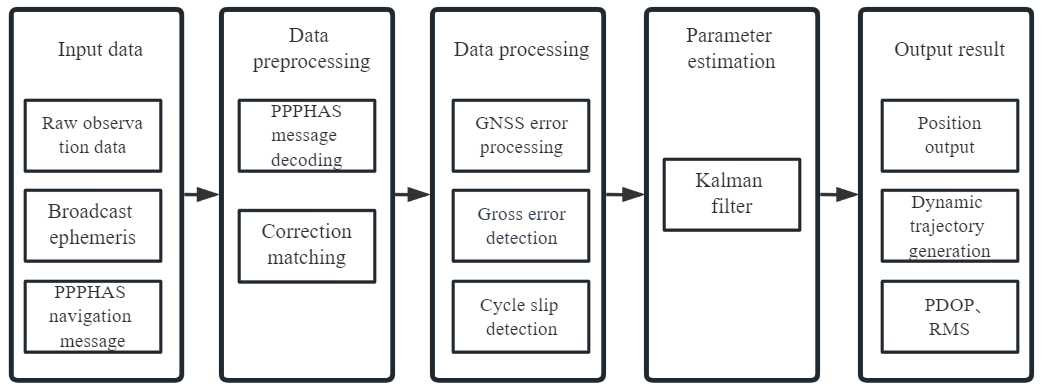
Fig.4 Precision single point positioning algorithm process based on PPP-HAS service
2 Performance analysis on static scene
This section mainly uses PPP-HAS to evaluate positioning accuracy. Fig.5-Fig.12 show the PPP positioning deviations in four different cities, where the horizontal axis is GPS time. From the figure, we can see the positioning results of the site after the results converge. The domestic positioning results are statistically calculated and averaged to obtain the final result.
When the horizontal accuracy of the positioning results is within 20cm and the accuracy for 100 consecutive epochs does not exceed 20cm, the results are considered to have converged. Table 3 provides average statistics of the positioning results of four domestic sites.
| Sites | E-S/cm | N-W/cm | U-D/cm | Horizontal 2D RMS/cm (95%) | Height 2D RMS/cm (95%) | Convergence Time /min |
|---|---|---|---|---|---|---|
| Shanghai | 8.7 | 6.1 | 17.9 | 19.7 | 26.9 | 23.8 |
| Beijing | 8.2 | 4.9 | 18.3 | 29.8 | 20.4 | 27.8 |
| Xinjiang | 9.2 | 8.9 | 16.3 | 21.4 | 33.0 | 27.4 |
| Guangzhou | 7.6 | 5.1 | 14.1 | 11.6 | 18.2 | 29.6 |
| Mean Value | 8.4 | 6.3 | 16.7 | 20.6 | 24.6 | 24.7 |
By following you can get detail information on each station for the accuracy.
 Site 1: Shanghai
Site 1: Shanghai
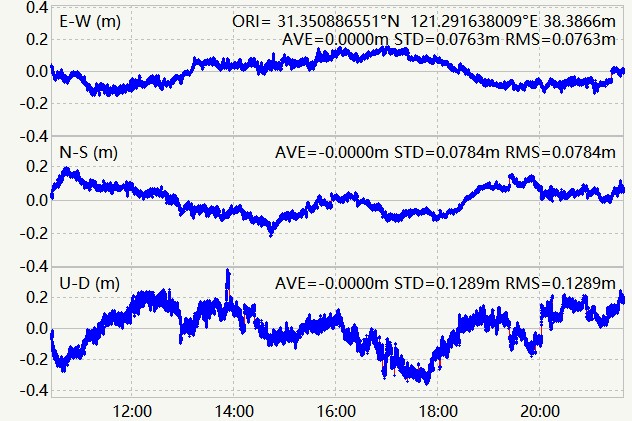 Fig.5 PPP-HAS positioning solution of Shanghai site |
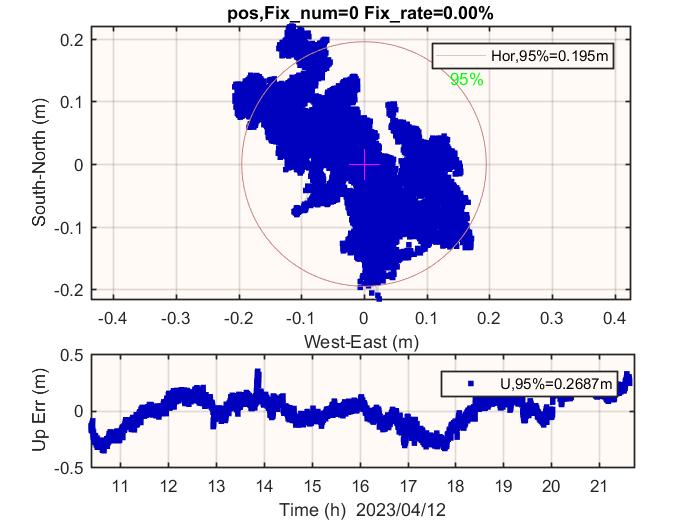 Fig.6 Plane positioning map of Shanghai site |
Site 2: Beijing
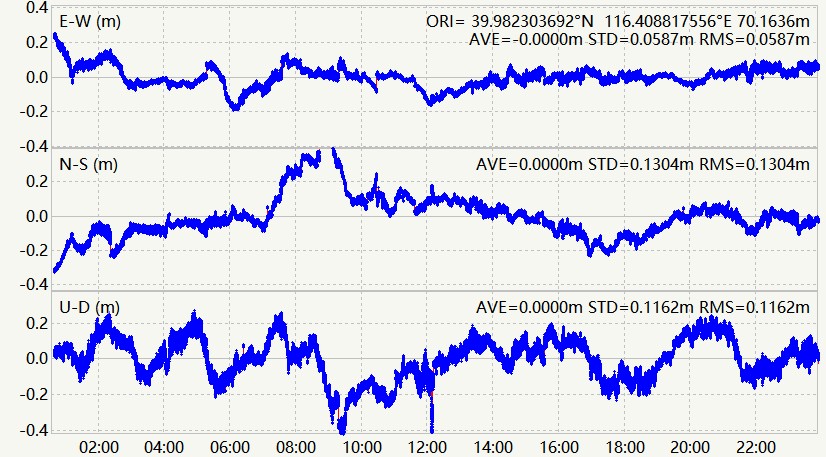 Fig.7 PPP-HAS positioning solution of Beijing site |
 Fig.8 Plane positioning map of Beijing site |
Site 3: Xinjiang province
 Fig.9 PPP-HAS positioning solution of Xinjiang site |
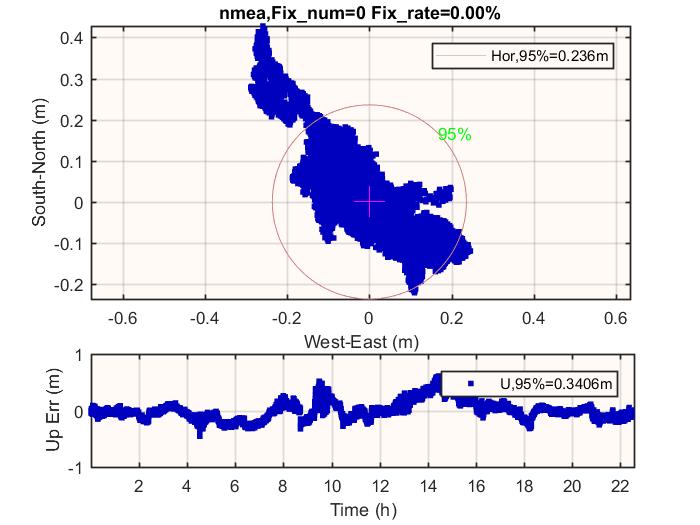 Fig.10 Plane positioning map of Xinjiang site |
Site 4: Guangzhou province
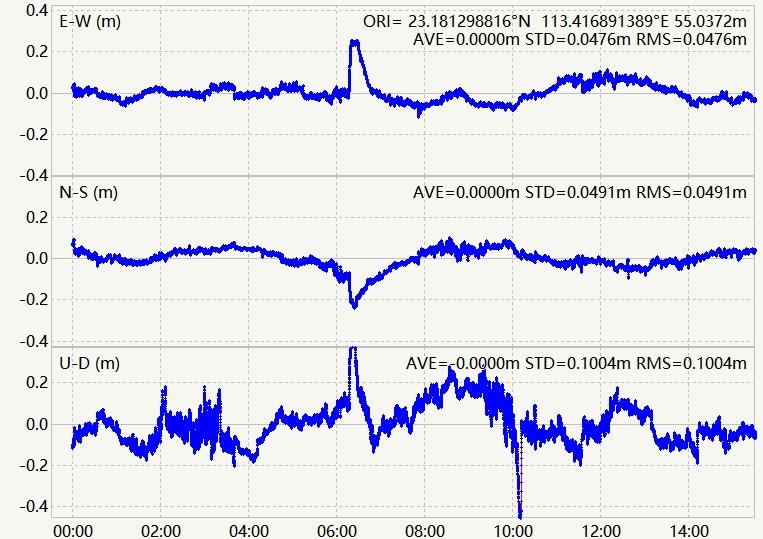 Fig.11 PPP-HAS positioning solution of Guangzhou site |
 Fig.12 Plane positioning map of Guangzhou site |
Except for testing in China, we selected some typical countries to conduct the performance testing. Fig.13-Fig.20 show the positioning deviations of each site. Table 4 statistics the multi-day accuracy average and convergence time of the selected sites.
| Sites | E-S/cm | N-W/cm | U-D/cm | Horizontal 2D RMS/cm (95%) | Height 2D RMS/cm (95%) | Convergence Time /min |
|---|---|---|---|---|---|---|
| Uganda | 5.2 | 4.9 | 11.3 | 17.5 | 25.8 | 17.6 |
| Brazil | 6.3 | 3.0 | 12.1 | 24.0 | 25.1 | 13.8 |
| Belgium | 4.5 | 6.6 | 13.3 | 10.4 | 17.0 | 16.4 |
| Canada | 7.3 | 7.9 | 8.5 | 26.8 | 15.7 | 15.7 |
| Mean value | 5.83 | 5.6 | 11.3 | 19.67 | 20.9 | 15.87 |
By following you can get detail information on each station for the accuracy.
Site 1: Uganda in Africa
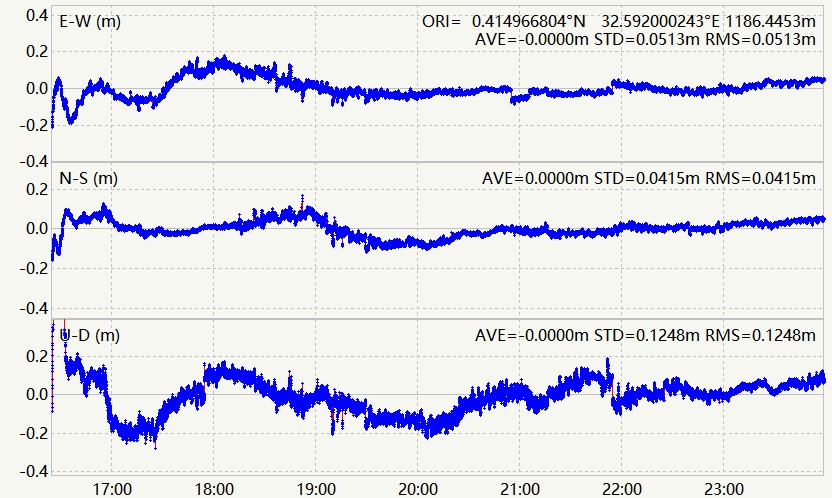 Fig.13 PPP-HAS positioning solution of Uganda site |
 Fig.14 Plane positioning map of Uganda site |
Site 2: Brazil in South America
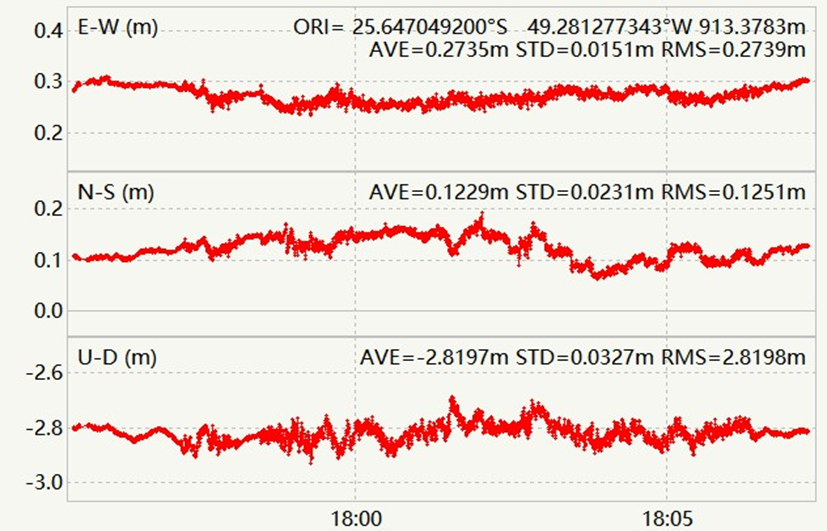
 Fig.15 PPP-HAS positioning solution of Brazil site |
 Fig.16 Plane positioning map of Brazil site |
Site 3: Belgium in Europe
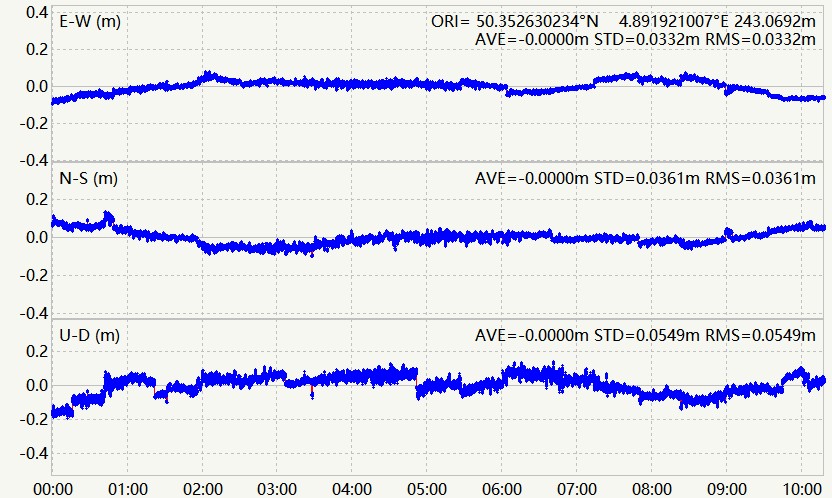 Fig.17 PPP-HAS positioning solution of Belgium site |
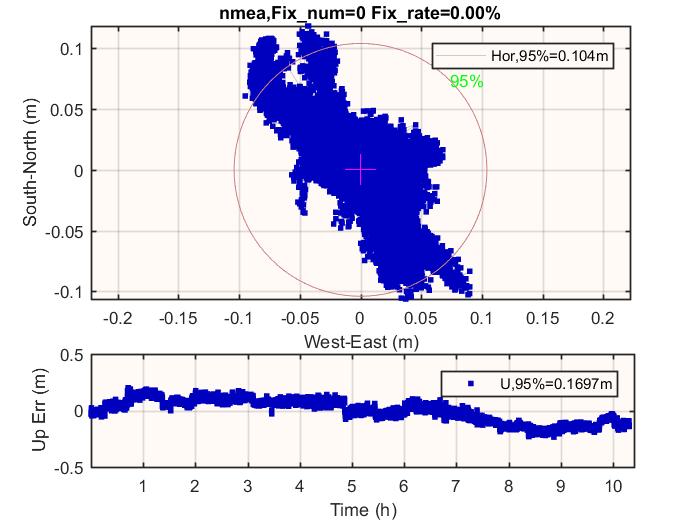 Fig.18 Plane positioning map of Belgium site |
Site 4: Canada in North America
 Fig.19 PPP-HAS positioning solution of Canada site |
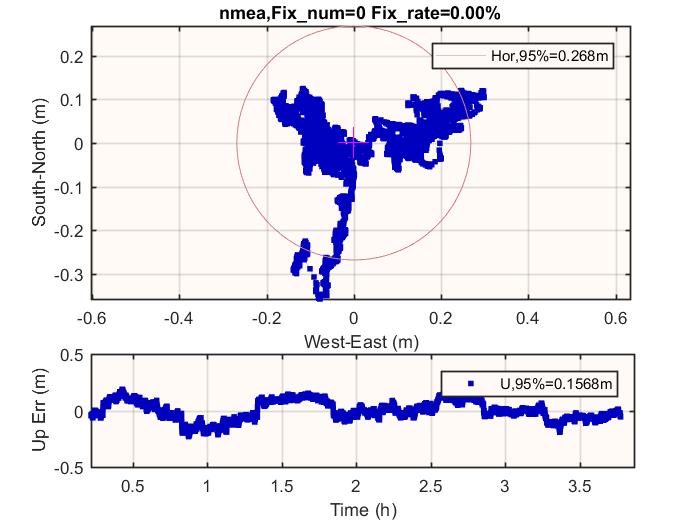 Fig.20 Plane positioning map of Canada site |
3 Performance analysis on dynamic scene
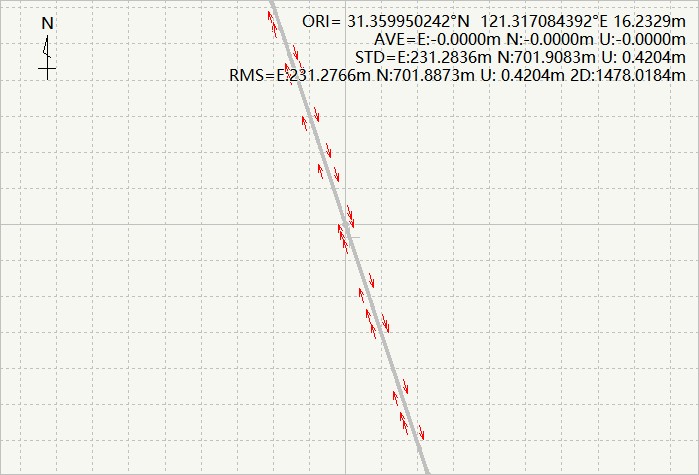
In order to examine the performance of real-time dynamic precision single-point positioning based on the PPP-HAS service, a vehicle dynamic test experiment was conducted from September 01 to October 10, 2023. The module used was SinoGNSS K803 board, and the environment was an open environment. Fig.23 shows the test results in Shanghai on November 7, Fig.26 shows the test results in Brazil on December 4. Compared with the high-precision RTK results, it can be seen that the difference between the positioning results of real-time dynamic PPP-HAS after stability and the positioning results of high-precision RTK is in decimeter level.
Fig.21 PPP-HAS real-time dynamic positioning results-1 |
Fig.22 Difference between PPP-HAS and RTK results-1 |
Fig.23 PPP-HAS real-time dynamic positioning results-2 |
Fig.24 Difference between PPP-HAS and RTK-2 |

Conclusion
The Galileo PPP HAS service covers the vast majority of countries worldwide, with an average convergence time of 15 to 20 minutes and an average accuracy of 20cm 2D RMS after convergence. European countries tend to experience better performance compared to others.
The Galileo High Accuracy Service (HAS), a free satellite-based Precise Point Positioning (PPP) solution, delivers unparalleled benefits across a myriad of applications. From traditional surveying and GIS data collection to dynamic environments such as precision agriculture, UAV, and intelligent driving, Galileo HAS revolutionizes global positioning with its precision and reliability.
About ComNav Technology
ComNav Technology develops and manufactures GNSS OEM boards and receivers for high precision positioning demanded applications. Its technology already been used in a wide range of applications such as surveying, construction, machine control, agriculture, intelligent transportation, precise timing, deformation monitoring, unmanned system. With a team dedicated for the GNSS technology, ComNav Technology is trying its best to supply reliable and competitive products to worldwide customers. ComNav Technology has been listed on the Shanghai Stock Exchange (Science and Technology Board), securities :ComNav Technology (Compass Navigation), Stock code: 688592.
About SinoGNSS®
SinoGNSS® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.
About ComNavTech®
ComNavTech® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.
About ComNav Technology
ComNav Technology develops and manufactures GNSS OEM boards and receivers for high precision positioning demanded applications. Its technology already been used in a wide range of applications such as surveying, construction, machine control, agriculture, intelligent transportation, precise timing, deformation monitoring, unmanned system. With a team dedicated for the GNSS technology, ComNav Technology is trying its best to supply reliable and competitive products to worldwide customers. ComNav Technology has been listed on the Shanghai Stock Exchange (Science and Technology Board), securities :ComNav Technology (Compass Navigation), Stock code: 688592.
About SinoGNSS®
SinoGNSS® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.
About ComNavTech®
ComNavTech® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.