What is IMU and how does it work in land surveying?
RTK receivers have been widely used in the field of high-precision surveying and mapping, such as cadastral survey, land survey, engineering survey, construction and power line survey, and topographic mapping, etc. With the increasingly use of RTK receivers, surveyors propose the demand to higher efficiency, convenience and safety.
Generally, land surveyors are required to center the bubble of Range pole when using the traditional RTK receivers to ensure that the centering rod and the vertical line where the measurement point is located coincide. Under the simplified calculation of the model, it can be considered that in the local geographic coordinate system (n system), the phase center of the GNSS antenna is consistent with the horizontal of the measurement point, and the elevation coordinates only have a difference in the centering rod length, as shown in Figure 1:
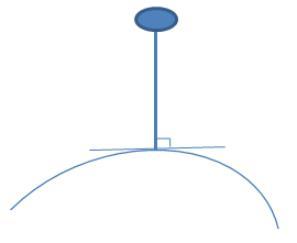
Figure 1. Traditional RTK receiver measurement
Traditional RTK receiver is easy to implement in software. However it increases the surveyor’s burden and is not efficient and convenient, especially in case of wall corner where points are difficult to be measured or even inaccessible. In such case, RTK receivers with tilt measurement function came into being. ComNav uses the RTK/INS integrated navigation scheme to achieve tilt measurement. These kind of RTK receivers are called IMU RTK receivers.
The IMU RTK receiver tilt measurement is realized in software as follows:
The line connecting the GNSS antenna phase center and the centering pole tip is regarded as a vector (vector L). In the local coordinate system (n system), when the direction in which the vector is inclined is determined, that is, the azimuth angle (Heading), and how much is tilted, that is, the tilt angle (Tilt), then the coordinates of the measurement point can be determined by projection transformation. In this way, the key to realizing the tilt measurement is to obtain these two angles.
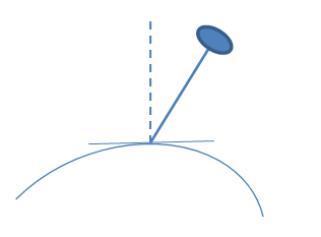
Figure 2. Inertial navigation RTK tilt measurement
When designing the inertial navigation RTK receiver, align the inertial measurement unit (IMU) accelerometer Z-sensitive axis parallel to the vector L. We set the carrier coordinate system (b system) to be parallel to the sensitive axis of the 3-axis accelerometer, and the origin is located at the intersection of the sensitive axes, forming a right-handed coordinate system. Then, no matter how the receiver moves, the vector L is a constant value vector in the b frame. Using this deterministic relationship, the aforementioned two angles can be solved by determining the rotation relationship between the b system and the n system, that is, the attitude angle, which is obtained by the RTK/INS integrated navigation system in real time.
Further,

 is the roll angle,
is the roll angle,  is the pitch angle,
is the pitch angle,  is the heading angle.
is the heading angle.
In addition, the acquisition of the initial heading angle and the maintenance of the heading angle accuracy are one of the crucial factors that determine the accuracy of the inclination measurement in the RTK/INS integrated navigation system.
Using IMU RTK receiver will definitely improve surveying efficiency: with no on-site calibrations and no need to center the bubble, much more time is saved, more points are safely accessed and results are accurate, reducing repeated work.
About ComNav Technology
ComNav Technology develops and manufactures GNSS OEM boards and receivers for high precision positioning demanded applications. Its technology already been used in a wide range of applications such as surveying, construction, machine control, agriculture, intelligent transportation, precise timing, deformation monitoring, unmanned system. With a team dedicated for the GNSS technology, ComNav Technology is trying its best to supply reliable and competitive products to worldwide customers. ComNav Technology has been listed on the Shanghai Stock Exchange (Science and Technology Board), securities :ComNav Technology (Compass Navigation), Stock code: 688592.
About SinoGNSS®
SinoGNSS® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.
About ComNavTech®
ComNavTech® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.
About ComNav Technology
ComNav Technology develops and manufactures GNSS OEM boards and receivers for high precision positioning demanded applications. Its technology already been used in a wide range of applications such as surveying, construction, machine control, agriculture, intelligent transportation, precise timing, deformation monitoring, unmanned system. With a team dedicated for the GNSS technology, ComNav Technology is trying its best to supply reliable and competitive products to worldwide customers. ComNav Technology has been listed on the Shanghai Stock Exchange (Science and Technology Board), securities :ComNav Technology (Compass Navigation), Stock code: 688592.
About SinoGNSS®
SinoGNSS® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.
About ComNavTech®
ComNavTech® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.