Beidou B2b service and B2b-PPP technology
PPP-B2b, the first high-precision signal Beidou Satellite Navigation System (BDS) publicly released, is broadcast by three Beidou Geosynchronous Orbit (GEO) satellites to provide users with open and free high-precision services. ComNav Technology leads to carry out PPP-B2b signal-related research and applies PPP-B2b technology and real-time Precision Point Positioning (PPP) algorithm to high-precision products, achieving real-time high-precision positioning without relying on communication networks. This is of great significance to high-precision applications in scientific research, land surveying and mapping, marine development, agriculture other fields.
 1 Introduction to PPP-B2b
1 Introduction to PPP-B2b
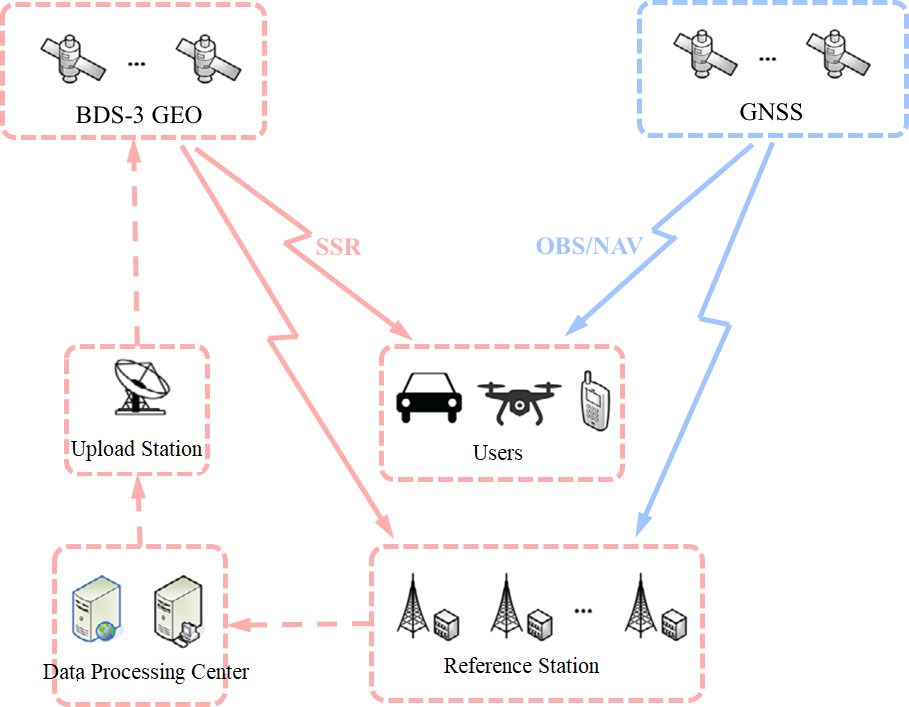
Figure 1 BDS-3 PPP service system
2 PPP-B2b Signal structure
After 64-ary LDPC (162, 81) encoding, the frame length shall be 972 symbols. These symbols will be concatenated together with 16 symbols of the preamble, 6 symbols of the PRN and 6 symbols of the reserved flags to form 1000 symbols in total.
The defined message types are shown in Table 1. However, currently only the first four message types are actually broadcast and are only for BDS-3 and GPS satellites. In order to ensure the correlation between the information content that broadcast by different message types, as well as the correlation between the correction message and the broadcast ephemeris, the messages are identified by four version numbers of IOD SSR, IODP, IODN and IOD Corr, for easy matching and use.
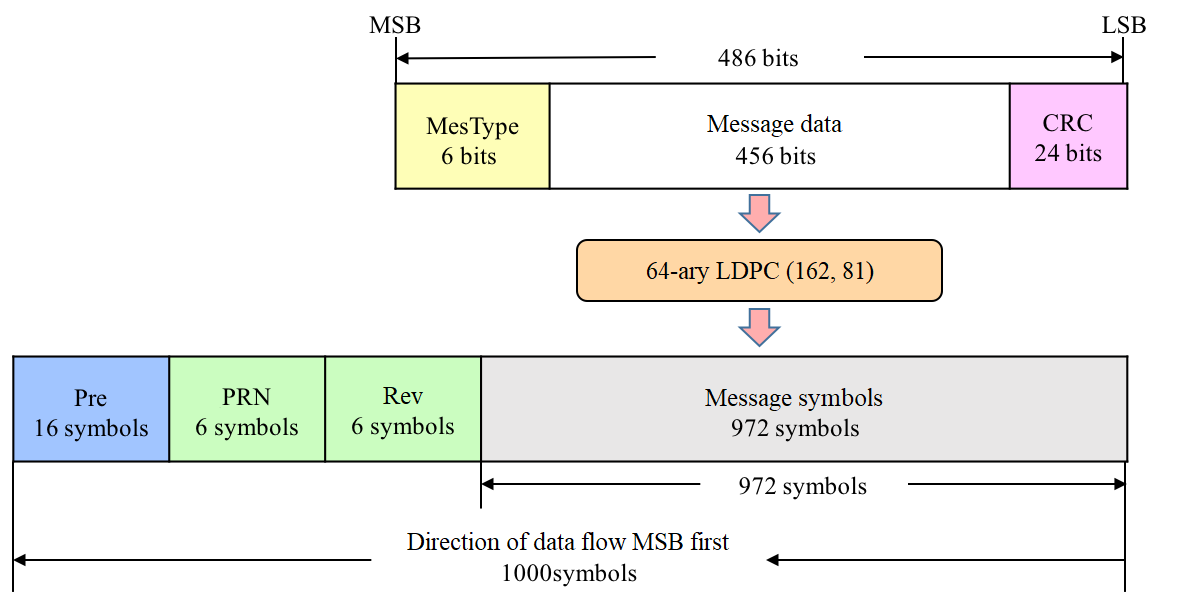
Figure 2 The PPP-B2b navigation message frame structure
Table 1 PPP-B2b defined message types
Message types | Information content |
1 | Satellite mask |
2 | Satellite orbit correction and user range accuracy |
3 | Differential code bias |
4 | Satellite clock correction |
5 | User range accuracy |
6 | Clock correction and orbit correction – combination 1 |
7 | Clock correction and orbit correction – combination 2 |
8-62 | Reserved |
63 | Null message |
The defined message types are shown in Table 1. However, currently only the first four message types are actually broadcast and are only for BDS-3 and GPS satellites. In order to ensure the correlation between the information content that broadcast by different message types, as well as the correlation between the correction message and the broadcast ephemeris, the messages are identified by four version numbers of IOD SSR, IODP, IODN and IOD Corr, for easy matching and use.
3 PPP-B2b Technology Rearch and Development
SinoGNSS K8-series support PPP-B2b signal that with a center frequency of 1207.14MHz and a bandwidth of 20.46MHz. Based on this hardware support, ComNav Technology R&D team realized Precise Point Positioning on K8-EVK via the PPP-B2b service.
Table 2: Main error source in GNSS measurement
Errors | Correction method |
Satellite clock errors | Clock correction (PPP-B2b) |
Satellite orbit errors | Orbit correction (PPP-B2b) |
Satellite hardware delay | Pseudo-range: TGD/DCB |
Satellite antenna phase center offset | Model correction |
Ionospheric delays | Ionosphere-free combination |
Tropospheric delays | Model correction + Parameter estimation |
Earth rotation effect | Model correction |
Relativity theory effect | Model correction |
Tide influence | Model correction |
Receiver clock errors | Parameter estimation |
Receiver hardware delay | (Included in receiver clock errors) |
Integer ambiguity | Parameter estimation |
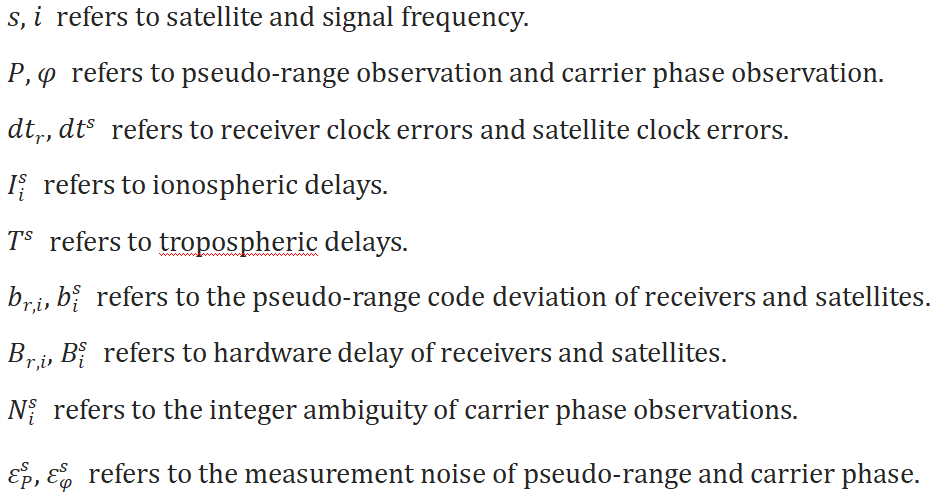
In PPP, the pseudo-range and carrier phase observations are mainly adopted. According to the geometry and error sources of GNSS positioning, the observation equation can be expressed as below,

In PPP-B2b signal corrections, the epoch time interval of orbit corrections in message 2 is 48 seconds. The broadcasted orbit correction information includes the components of the orbit correction vector  in the radial, tangential and normal directions. The satellite position correction vector
in the radial, tangential and normal directions. The satellite position correction vector  can be calculated via orbit corrections. When the IODN of orbit correction message matches the IODE of navigation messages, the satellite position vector
can be calculated via orbit corrections. When the IODN of orbit correction message matches the IODE of navigation messages, the satellite position vector  calculated from broadcast ephemeris can be corrected, the correction formula is as below,
calculated from broadcast ephemeris can be corrected, the correction formula is as below,

The calculation formula of satellite position correction vector is as below,
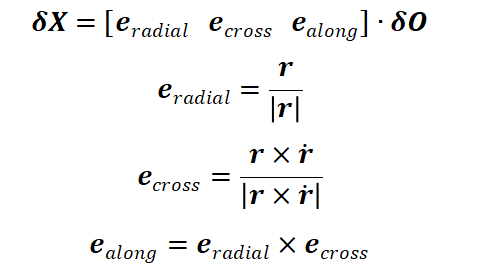
In the formula,  refers to the satellite position and velocity vector in broadcast ephemeris,
refers to the satellite position and velocity vector in broadcast ephemeris,  correspond to the unit vectors in the radial, tangential and normal directions.
correspond to the unit vectors in the radial, tangential and normal directions.
The epoch time interval of clock corrections in PPP-B2b message 4 is 6 seconds. Once the clock correction message successfully matches the broadcast ephemeris, the clock error  calculated from broadcast ephemeris can be corrected by the clock correction message
calculated from broadcast ephemeris can be corrected by the clock correction message  , the formula is as below,
, the formula is as below,

When the IOD Corr identifiers of message 2 and message 4 are the same and the IODN of message 2&4 can match the IODE of navigation messages, the orbit correction and clock corrections can be used together to correct the errors.
1) Data input. Except the basic GNSS observation data and broadcast ephemeris, the PPP-B2b messages are also required.
2) Data pre-processing. Acquire the detailed correction data by decoding the PPP-B2b messages. And it is necessary to match the identifiers of different messages to ensure that the correction data can be used for accurate and effective correction, including the matching of navigation messages and correction data, and the matching of different types of correction data.
3) Data processing. This step is to process various errors in GNSS data. The satellite orbit error and satellite clock error can be corrected by the correction data provided by PPP-B2b messages. The ionospheric delay can be eliminated by ionosphere-free combination. And some errors can be corrected by standard models. The gross error rejection and cycle-slip detection are also required. After above correction and processing, the precise satellite position, pseudo-range and carrier phase are obtained.
4) Parameter estimation. Estimate unknow parameters based on Kalman filtering, including station coordinates and some uncorrected errors in previous step, such as receiver clock error, integer ambiguity and tropospheric delay.
5) Result output. After processing, it can output PPP result includes station coordinates, positioning accuracy, DOP, RMS and other information.
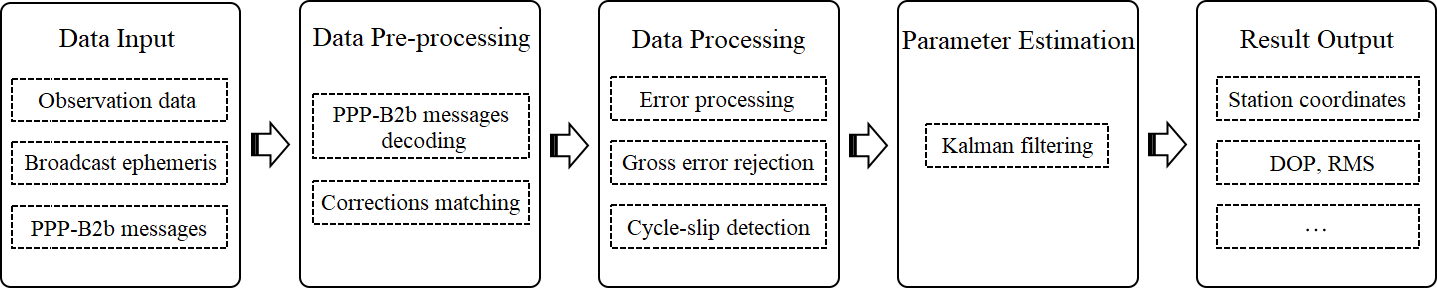
Figure 3 PPP algorithm diagram based on PPP-B2b service
The R&D team of ComNav Technology conducted a 10hrs dynamic test of above algorithm on K8-EVK and the positioning results are shown in Figure 4 and Table 3. The PPP accuracy achieves 6cm horizontally and 8cm vertically after 13 minutes of convergence, which can satisfy most high precision positioning requirements.

Figure 4 PPP accuracy of K8-EVK
Table 3: Positioning result
Horizontal Accuracy | RMS:0.0603m |
95%:0.0993m | |
Vertical Accuracy | RMS:0.0849m |
95%:0.1979m | |
Horizontal convergence time | 705s/10cm |
Vertical convergence time | 765s/20cm |
Number of samples | 36001 Epochs,1Hz |
4 The benefits of PPP-B2b Service
The advantages of real-time Precision Point Positioning technology based on PPP-B2b services are reflected in three aspects:
Compared with traditional commercial PPP, it is open and free;
It can provide wide-area decimeter-level accuracy positioning service within the serving range, not be restricted by factors such as base station distance, differential data integrity and quality. This means part of RTK operations will be replaced.
PPP-b2b algorithm is realized by receiving the telegram data broadcast through the Beidou global satellites instead of relying on the network to actively receive other external information, making the positioning process more stable and reliable.
From the perspective of application, the Precision Point Positioning technology based on PPP-B2b can provide users with high-precision services in the environments where RTK is unstable or uncovered. Meanwhile it can solve the problems in the areas such as Gobi desert, mines and seas where the CORS service cannot be covered and the base station is difficult to set up.
At present, K803 and K803S high-precision positioning module and K803_EVK evaluation kit have supported the PPP-B2b high-precision service. This service will be implemented on high-precision modules such as K802 and K823 modules subsequently so that users can easily obtain and use PPP -B2b function after integrating modules directly.
Note:
At present, the coverage of the BeiDou PPP-B2b signal only includes the Asia-pacific region.
About ComNav Technology
ComNav Technology develops and manufactures GNSS OEM boards and receivers for high precision positioning demanded applications. Its technology already been used in a wide range of applications such as surveying, construction, machine control, agriculture, intelligent transportation, precise timing, deformation monitoring, unmanned system. With a team dedicated for the GNSS technology, ComNav Technology is trying its best to supply reliable and competitive products to worldwide customers. ComNav Technology has been listed on the Shanghai Stock Exchange (Science and Technology Board), securities :ComNav Technology (Compass Navigation), Stock code: 688592.
About SinoGNSS®
SinoGNSS® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.
About ComNav Technology
ComNav Technology develops and manufactures GNSS OEM boards and receivers for high precision positioning demanded applications. Its technology already been used in a wide range of applications such as surveying, construction, machine control, agriculture, intelligent transportation, precise timing, deformation monitoring, unmanned system. With a team dedicated for the GNSS technology, ComNav Technology is trying its best to supply reliable and competitive products to worldwide customers. ComNav Technology has been listed on the Shanghai Stock Exchange (Science and Technology Board), securities :ComNav Technology (Compass Navigation), Stock code: 688592.
About SinoGNSS®
SinoGNSS® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.
About ComNavTech®
ComNavTech® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.