
K8 Series GNSS OEM Module Test Report - ComNav Technology
New released K8 series modules are with ComNav Technology’s new generation high-accuracy Quantum III SoC chip with capability of tracking all the current and planned GNSS constellations. Additionally, K8 series modules integrate with a tactical grade Inertial Measurement Unit (IMU).
Traditionally, such systems are at a high cost, high power consumption and large volume; however, the K8 series modules totally overcome these weaknesses. With robust performance and easy integration, K8 series modules can be applied in a wide range of applications, varying from specialized high accuracy GNSS fields to consuming market.
In order to verify K8’s performance, the R&D team of ComNav Technology conducted a contrastive field test by examining K8 series OEM modules and other three manufactures in different environments. Both the dynamic and static test scenes are chosen in order to have a comprehensive understanding of how K8 modules perform. Single baseline RTK corrections were used in this experiment.
1. Vehicle-Mounted Dynamic Test
In dynamic condition, the R&D team did the vehicle-mounted dynamic test and low speed railcar-mounted dynamic test respectively. M1, M2, M3 stand for other three manufactures, among which K8 and M1’s modules had IMU module while M2 and M3 modules did not.
The data was driven in mid 2020, primarily targeting all the classic environment of navigation system. The test route is given in Figure1.

Figure1 General Vehicle-Mounted Dynamic Route
1.1 Performance in Urban Canyon
Figure 2 demonstrates the positioning track of all GNSS OEM modules in urban canyon. It is found that all modules have good capability of searching satellites in the clustered canyon and had smooth track line fitting the road.
While in clustered urban canyon(R) with more obstacles, the positioning performance is different. Results show K8 series module performs as strongly as in sparse canyon. M1 module offsets slightly while passing the tall building although it is still in a smooth track. M2 module is with some fly points. M3 module offsets obviously and shows an unsmoothed track, indicating it cannot provide accurate navigation data in clustered environment.
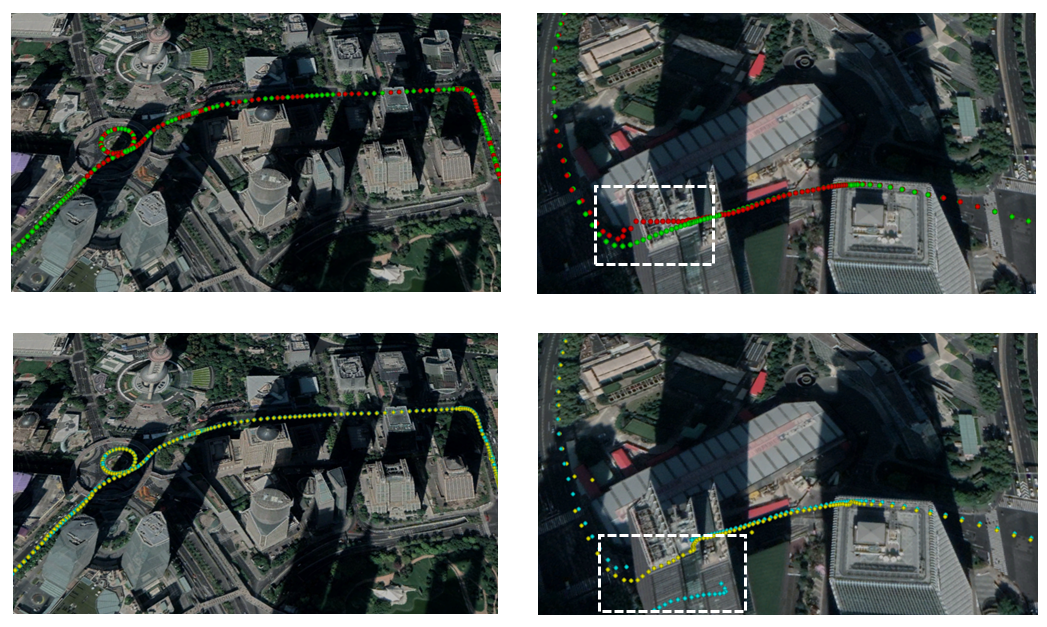
Figure2 Positioning Tracking in Sparse Urban Canyon(L) and in Clustered Urban Canyon(R)
K8 series: green; M1: red; M2: yellow; M3: blue
1.1.2 Performance in Tunnel
Tunnel is one of the common testing environments to test the long time IMU performance. In this scene, the R&D team compared K8 modules and M1’s due to M2 and M3 modules don’t have IMU on board. The positioning track is shown in Figure 3.
The tunnel is about 0.5 kilometer, about 30s’ driving time. The test vehicle passed the tunnel back and forth so it is assumed that the track should be almost parallel. It is clearly that the track of K8 modules is paralleled as is shown in Figure 3, which is in line with the assumption. The track of M1 module offsets when the car is in middle of the tunnel, manifesting that inertial navigation algorithm of M1 module in this testing is imperfect.
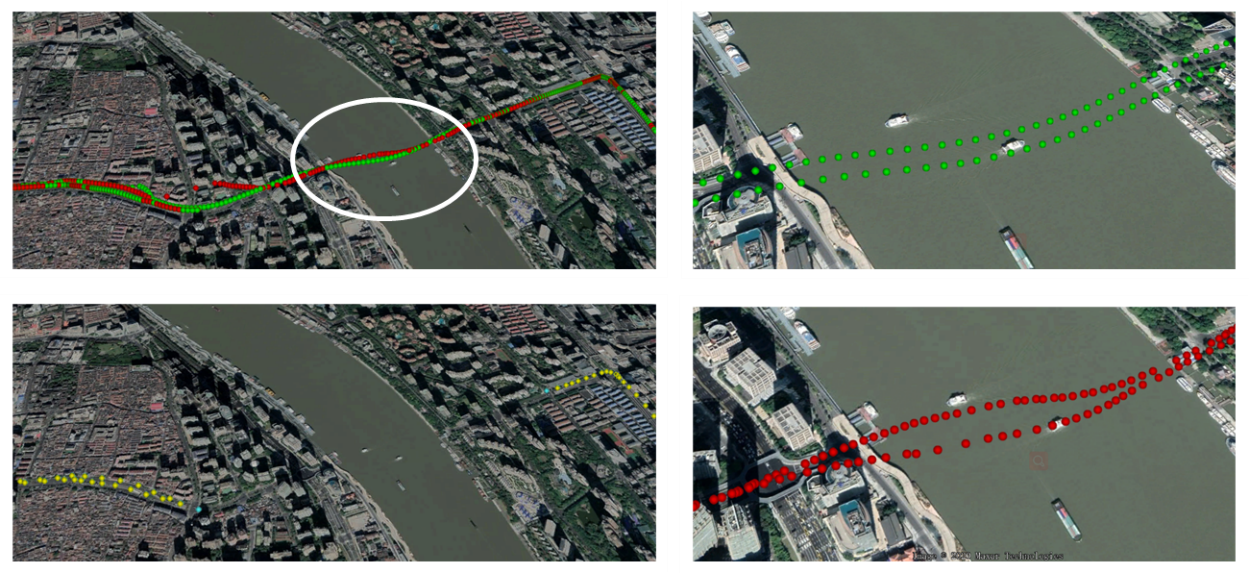
Figure3 Overall(L) and Partial(R) Positioning Track in Tunnel
K8 series: green; M1: red; M2: yellow; M3: blue
1.1.3 Performance under Overpass
The overpass is a typical half-sheltered environment where modules can only track the half number of satellites for a long time compared with open-sky scene. The positioning track under overpass of all modules is given in Figure4.
As is shown in Figure 4, all modules perform wel except for the occasional offset of M2 module.

Figure4 Positioning Track under Overpass
K8 series: green; M1: red; M2: yellow; M3: blue
1.1.4 Performance under Heavy Canopy
Under heavy canopy is one of typical GNSS-denied environments. Results show that all modules perform well and have smooth track line, as is shown in Figure 5.
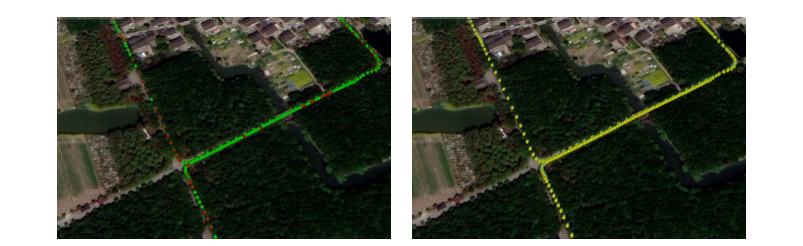
Figure5 Positioning Track under Heavy Canopy
K8 series: green; M1: red; M2: yellow; M3: blue
1.1.5 Performance in Underground Garage
The R&D team also examined the IMU performance of K8 modules in underground garage, concerning long time and low speed. It takes 3.5 minutes in the underground garage. The whole positioning track is shown in Figurec6. it is manifested that onboard IMU continues work for several minutes in the event of losing GNSS navigation. In addition, the track of K8 series modules is smoother and more reliable than M1’s, which indicating K8 has a stronger inertial navigation algorithm.

Figure 6 Positioning Track map in Underground Garage
K8 series: green; M1: red
1.2 Low-Speed Dynamic
A Testing elliptic orbit is designed with half side of orbit in open sky and the other under trees. The electric railcar runs with a stable speed, same height and same path on the orbit. The Figure 7 is the elliptic orbit.

Figure7 Railcar for Testing
Figure 8 demonstrates the horizontal and vertical positioning accuracy of all OEM modules. As is shown that all modules can obtain high quality positioning information while M2 modules loses positioning information when passing under the tree.
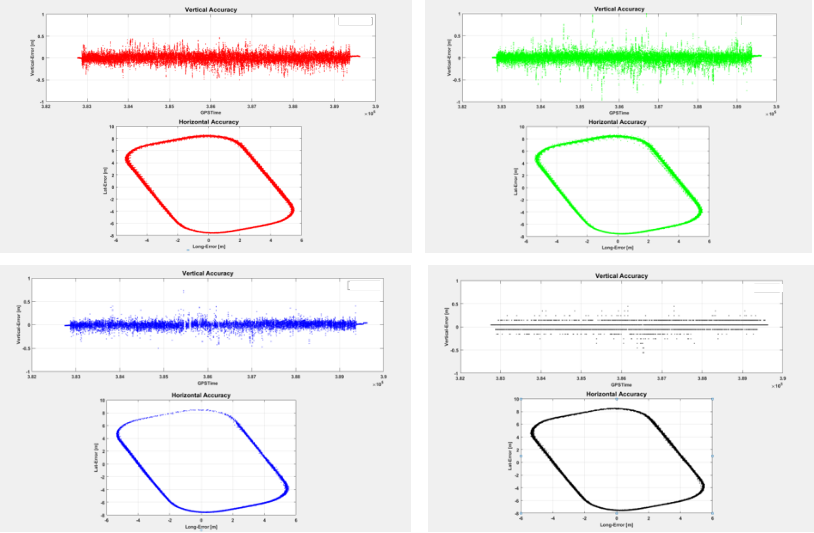
Figure8 Positioning Accuracy on Railcar
K8 series: red; M1: green; M2: blue; M3: black
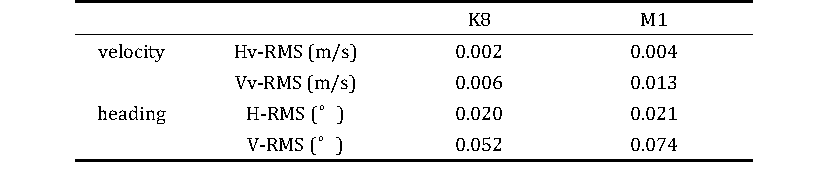
The heading precision data is shown in Table 1. Only K8 series and M1 module are analyzed as they support single module heading. It is seen that K8 performs better both in the velocity precision and heading precision than M1 module.
Table1: Velocity Accuracy (constant speed) and Heading Accuracy (3m baseline)
2. Static RTK Test
Aiming to verify the geodetic performance especially for land survey area, the R&D team also conducted a performance test in static condition in different environments and different baseline distance.
2.1 Performance under Trees
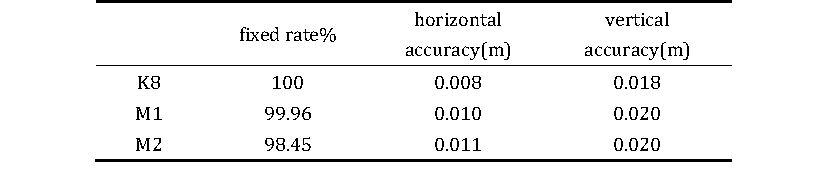
As we all know that trees and buildings are the most common obstructions in land surveying task. Therefore, the R&D team examined the static RTK under trees and in cluster buildings respectively. 8km baseline and 30km baseline RTK performance of all OEM modules are given in Table 2 and Table 3.
As is shown in Table 2 and Table3, both in 8km baseline and 30km baseline K8 has the highest fixed rate and smallest RMS, indicating its robust reliability and accuracy. In addition, the shortest initializiton time can improve the efficiency of surveying work. M2 takes almost twice as long to initialize and its fixed rate is only half of K8 series.
Table2: 8km Baseline RTK Performance (re-initialization/ 5min)

Table3: 30km Baseline RTK Performance (re-initialization/ 5min)

2.2 Performance in Urban Canyon
The second scene is in urban canyon, both 8km baseline and 30km baseline RTK performance of all OEM modules are given in Table 4 and Table 5.
As is shown in Table 4 and Table 5 although all OEM modules perform well, K8 module still shows a little advantage than the modules of other two manufactures.
Table4: 8km Baseline RTK Performance (re-initialization/ 5min)
Table5: 30km Baseline RTK Performance (re-initialization/ 5min)

![]()
2.3 Performance in Open Sky
Considering common obstructions, the R&D team also conducted a long baseline test. The RTK performance of all OEM modules at a 60km baseline is shown in Table 6. The 60km baseline RTK is not recommended in actual surveying work and here is only for performance test.
As is shown in Table 6, K8 still has a 100% fixed rate and highest accuracy even in 60km long baseline though all OEM modules are able to process the long baseline RTK with great accuracy and fixed rate. K8 series performs best among the all modules.
Table6: 60km Baseline RTK Performance
According to the contrastive test with OEM modules of other manufactures, K8 series GNSS OEM modules outperform modules from other manufactures with high accuracy, reliability and powerful inertial navigation algorithm. It is manifested that whether in the static RTK test for traditional land surveying application, low dynamic and signal-denied environment test for UAV and robotic applications, or vehicle-mounted dynamic navigation test for smart driving application, K8 series modules are the ideal ones.
About ComNav Technology
ComNav Technology develops and manufactures GNSS OEM boards and receivers for high precision positioning demanded applications. Its technology already been used in a wide range of applications such as surveying, construction, machine control, agriculture, intelligent transportation, precise timing, deformation monitoring, unmanned system. With a team dedicated for the GNSS technology, ComNav Technology is trying its best to supply reliable and competitive products to worldwide customers. ComNav Technology has been listed on the Shanghai Stock Exchange (Science and Technology Board), securities :ComNav Technology (Compass Navigation), Stock code: 688592.
About SinoGNSS®
SinoGNSS® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.
About ComNavTech®
ComNavTech® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.
About ComNav Technology
ComNav Technology develops and manufactures GNSS OEM boards and receivers for high precision positioning demanded applications. Its technology already been used in a wide range of applications such as surveying, construction, machine control, agriculture, intelligent transportation, precise timing, deformation monitoring, unmanned system. With a team dedicated for the GNSS technology, ComNav Technology is trying its best to supply reliable and competitive products to worldwide customers. ComNav Technology has been listed on the Shanghai Stock Exchange (Science and Technology Board), securities :ComNav Technology (Compass Navigation), Stock code: 688592.
About SinoGNSS®
SinoGNSS® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.
About ComNavTech®
ComNavTech® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.