
Mensajes para obtener información de velocidad del GNSS
La velocidad es un parámetro crucial en la recopilación de información de navegación, influyendo significativamente en la precisión y el rendimiento de la navegación. Los productos de ComNav destacan en la captura y seguimiento de señales satelitales, proporcionando valiosa información sobre la velocidad durante el movimiento. En este blog, presentaremos algunos registros relacionados con la velocidad a continuación:
GPVTG BESTVEL BESTXYZ GPRMC GPNAV GPYBM KSXT AGRIC DRONE
 1 GPVTG
1 GPVTG
Este mensaje se utiliza comúnmente para emitir datos de velocidad, que incluyen el ángulo de dirección y la velocidad de movimiento, lo que nos permite obtener la trayectoria del movimiento de un objeto.
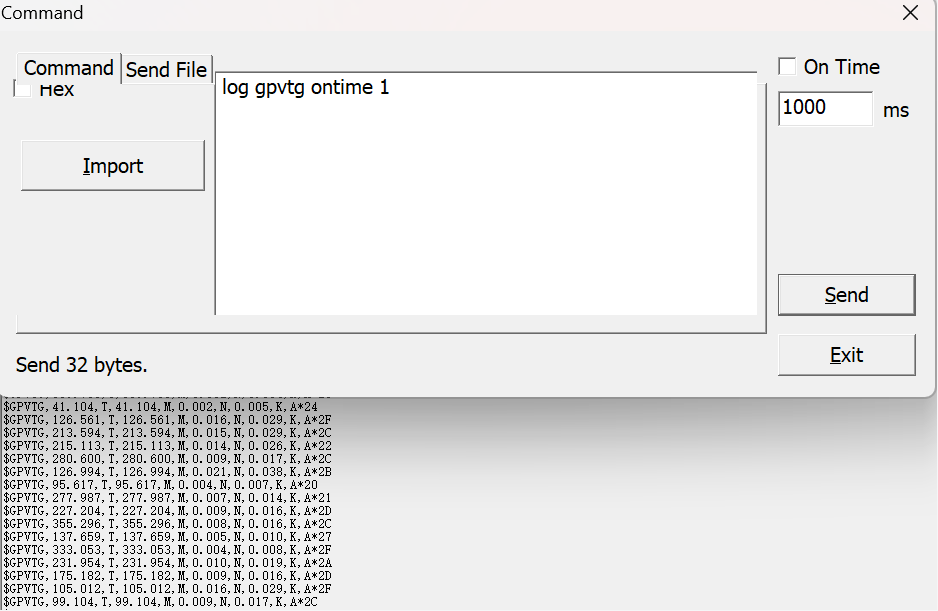
Fig.1 Mensaje GPVTG
Comando de entrada: log gpvtg ontime 1
Aquí está el formato de salida estándar del GPVTG:
$GPVTG,148.030,T,158.030,M,0.304,N,0.563,K,D*27Donde 0.304 es la velocidad en nudos, 0.563 es la velocidad en km/h.
2 BESTVEL
Este mensaje contiene la mejor información de velocidad disponible calculada por el dispositivo. Además, informa sobre un indicador de estado de la velocidad, lo cual es útil para indicar si los datos correspondientes son válidos. Las mediciones de velocidad a veces tienen una latencia asociada. El tiempo de validez es la etiqueta de tiempo en el registro menos el valor de latencia.
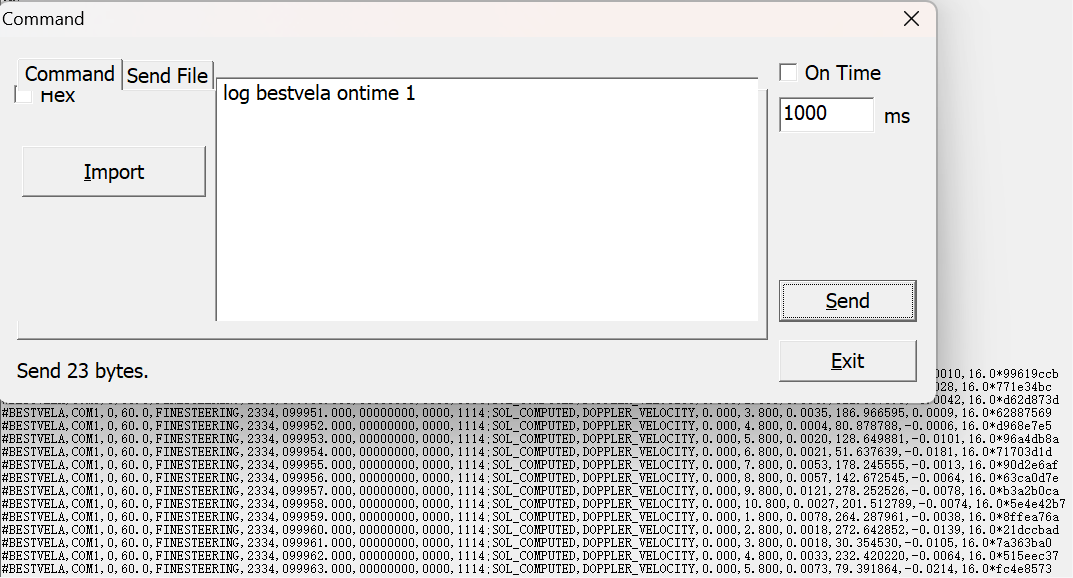
Fig.2 Mensaje BESTVEL
Comando de entrada: log bestvela ontime 1
Aquí está el formato de salida estándar del mensaje BESTVEL:
#BESTVELA,COM1,0,60.0,FINESTEERING,2222,378338.000,00000000,0000,1114;SOL_COMPUTED,DOPPLER_VELOCITY,0.000,1.000,0.0020,193.563897,0.0003,4.0*af2f3c2eDonde 0.0020 es la velocidad horizontal respecto al suelo en m/s; 0.0003 es la velocidad en la dirección vertical en m/s, los valores positivos indican la dirección hacia arriba, y los valores negativos indican la dirección hacia abajo.
3 BESTXYZ
Este mensaje incluye la mejor velocidad del dispositivo en coordenadas ECEF.
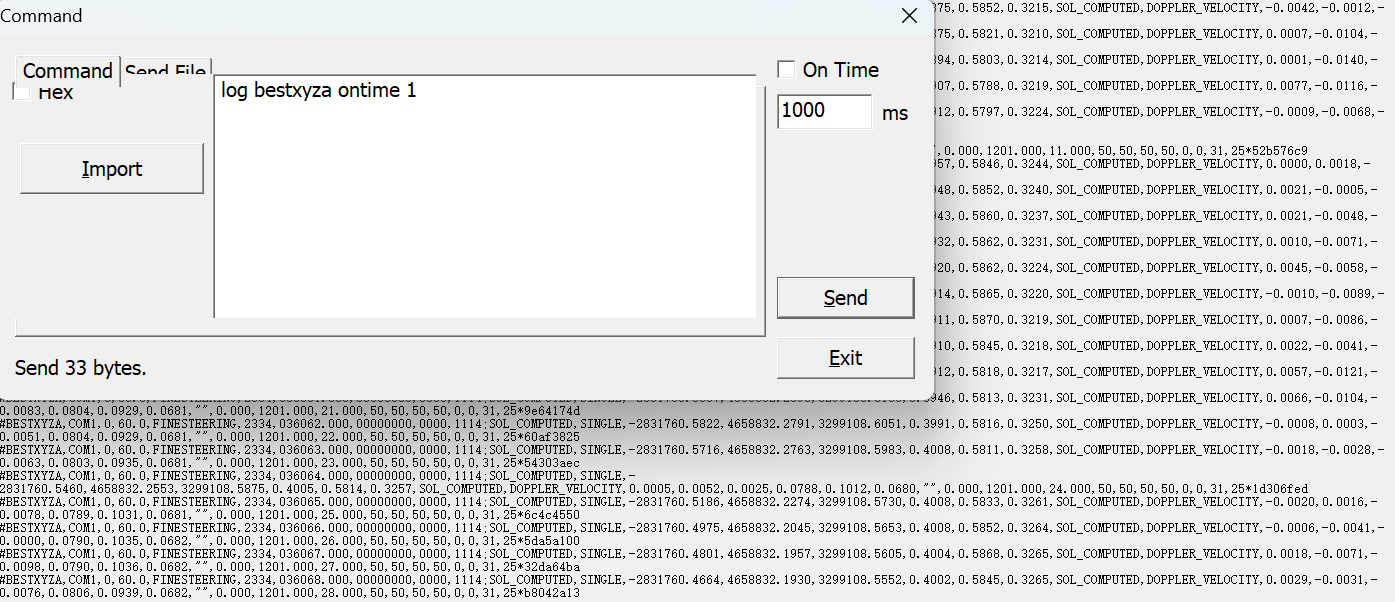
Fig.3 Mensaje BESTXYZ
Comando de entrada: log bestxyza ontime 1
El formato estándar del mensaje DRONE es el siguiente:
#BESTXYZA,COM1,0,60.0,FINESTEERING,2222,378599.000,00000000,0000,1114;SOL_COMPUTED,NARROW_INT,-2831765.8413,4658833.3032,3299109.2852,0.0079,0.0094,0.0078,SOL_COMPUTED,DOPPLER_VELOCITY,0.0014,0.0001,-0.0018,0.0033,0.0041,0.0034,"0008",0.000,1.000,10.000,46,40,46,46,0,0,0,203*f94f1bd1
Donde 0.0014, 0.0001 y 0.0018 representan la velocidad en las direcciones x, y y z.
4 GPRMC
Este mensaje contiene la hora, la posición, la velocidad y el ángulo real de rumbo, y es un mensaje estándar NMEA. En comparación con el GPVTG, este mensaje proporciona información de posición.
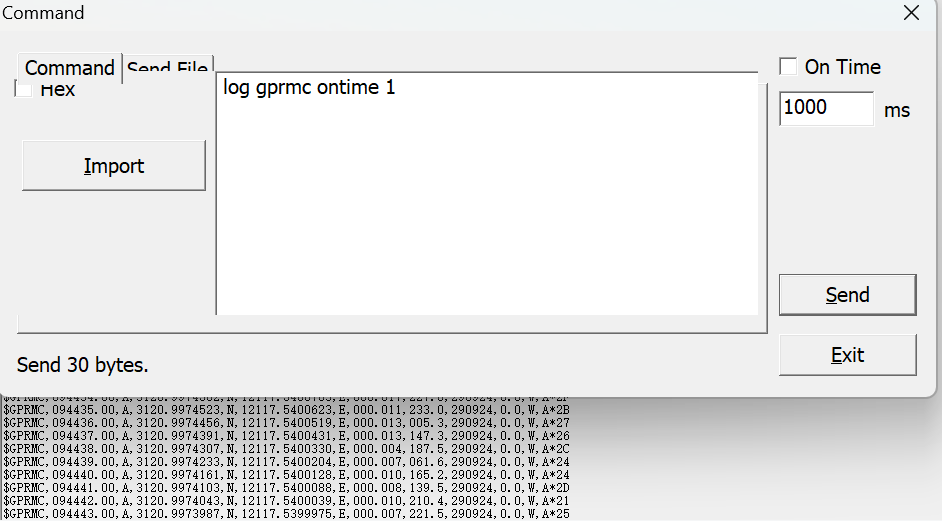
Fig.4 Mensaje GPRMC
Comando de entrada: log gprmc ontime 1
Aquí está el formato de salida estándar del mensaje GPRMC:
$GPRMC,074539.00,A,3120.9969570,N,12117.5424237,E,000.004,133.5,120822,10.0,W,D*1CDonde 000.004 es la velocidad en nudos.
5 GPNAV
Este mensaje es un mensaje no estándar, que incluye la posición, la velocidad, la información de seguimiento y también los ángulos de rumbo, inclinación y balanceo (reservados) cuando se utilizan antenas duales.
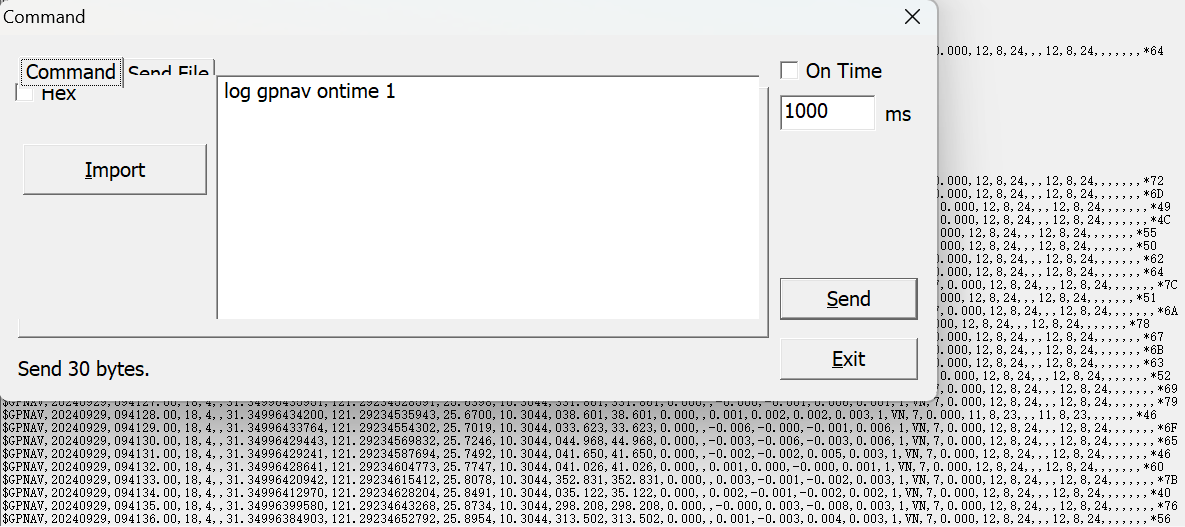
Fig.5 Mensaje GPNAV
Comando de entrada: log gpnav ontime 1
Aquí está el formato de salida estándar del mensaje GPNAV:
$GPNAV,20151003,123707.00,17,3,,31.17432494563,121.38795557054,41.7907,10.7811,176.628,0.000,0.000,,0.000,-0.002,-0.010,0.002,1,NN,7,0.000,8,5,9,,,8,5,9,,,,,,,*6FDonde 0.002 es la velocidad en tierra en m/s.
6 GPYBM
Este mensaje es un mensaje no estándar, que incluye información de posición, velocidad e información PJK. Este mensaje puede emitir información de velocidad en diferentes direcciones, incluyendo velocidad hacia el norte, hacia el este, velocidad vertical y velocidad en tierra.
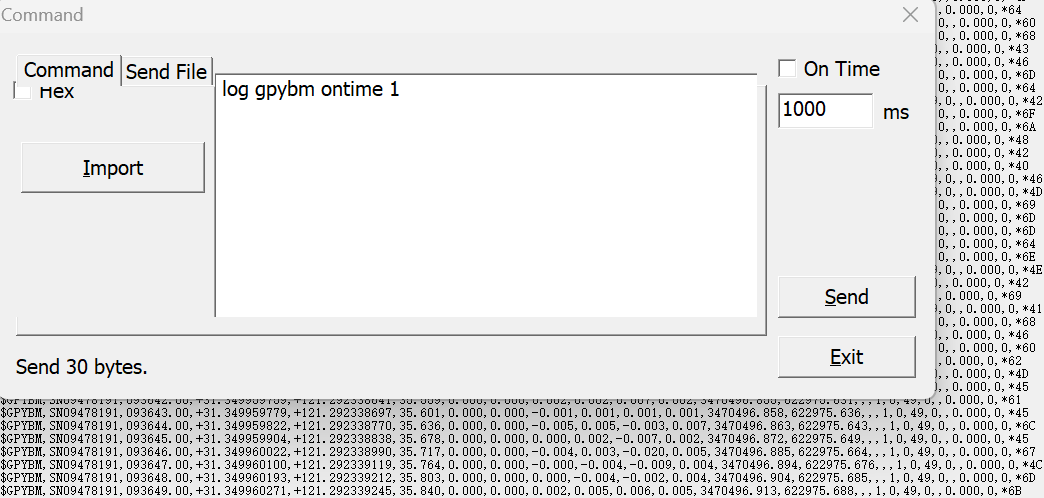
Fig.6 Mensaje GPYBM
Comando de entrada: log gpybm ontime 1
Aquí está el formato de salida estándar del mensaje GPYBM:
$GPYBM,SN00520429,070326.00,+31.170243388,+121.398934274,15.286,346.840,1.290,0.000,-0.002,0.003,0.002,3449917.897,538032.213,-451.861,1088.741,4,4,12,1,,,,*4BLos valores 0.000, -0.002, 0.003 y 0.002 representan la velocidad hacia el norte, velocidad hacia el este, velocidad vertical y velocidad en tierra, respectivamente, con todas las unidades en m/s.
7 KSXT
Este mensaje emite la velocidad del dispositivo GNSS, así como las velocidades hacia el este, hacia el norte y hacia arriba en el sistema de coordenadas geográficas, con unidades en km/h.
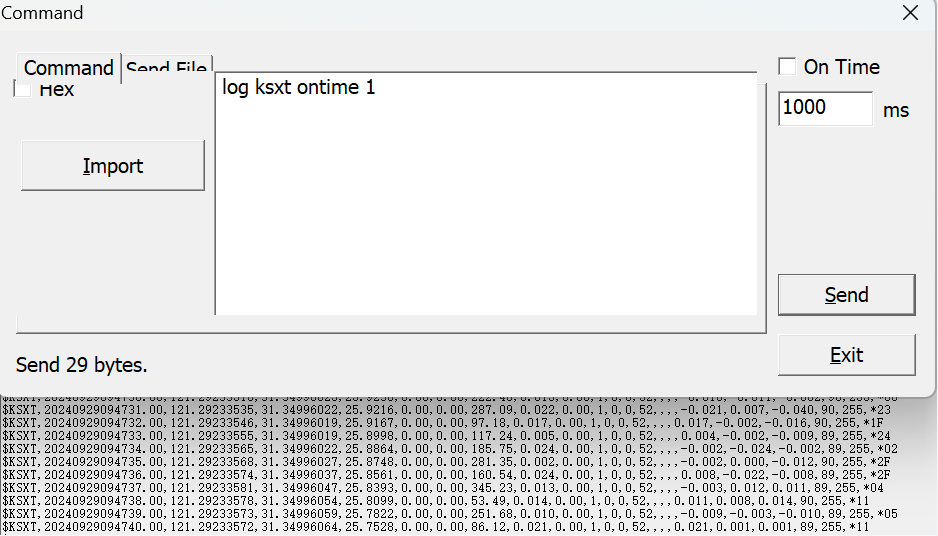
Fig.7 Mensaje KSXT
Comando de entrada: log ksxt ontime 1
El formato estándar del mensaje KSXT es el siguiente:
$KSXT,20210906104914.00,121.29239578,31.34996850,33.3672,276.66,43.34,83.17,0.102,0.00,1,3,39,42,,,,0.101,0.012,0.143,95,94,*21Donde 0.102 representa la velocidad, y 0.101, 0.012 y 0.143 representan la velocidad hacia el este, hacia el norte y la velocidad vertical, respectivamente.
8 AGRIC
Este mensaje muestra la velocidad del dispositivo GNSS, así como las velocidades hacia el este, hacia el norte y hacia arriba. Además, el mensaje también proporciona la desviación estándar de la velocidad en diferentes direcciones.
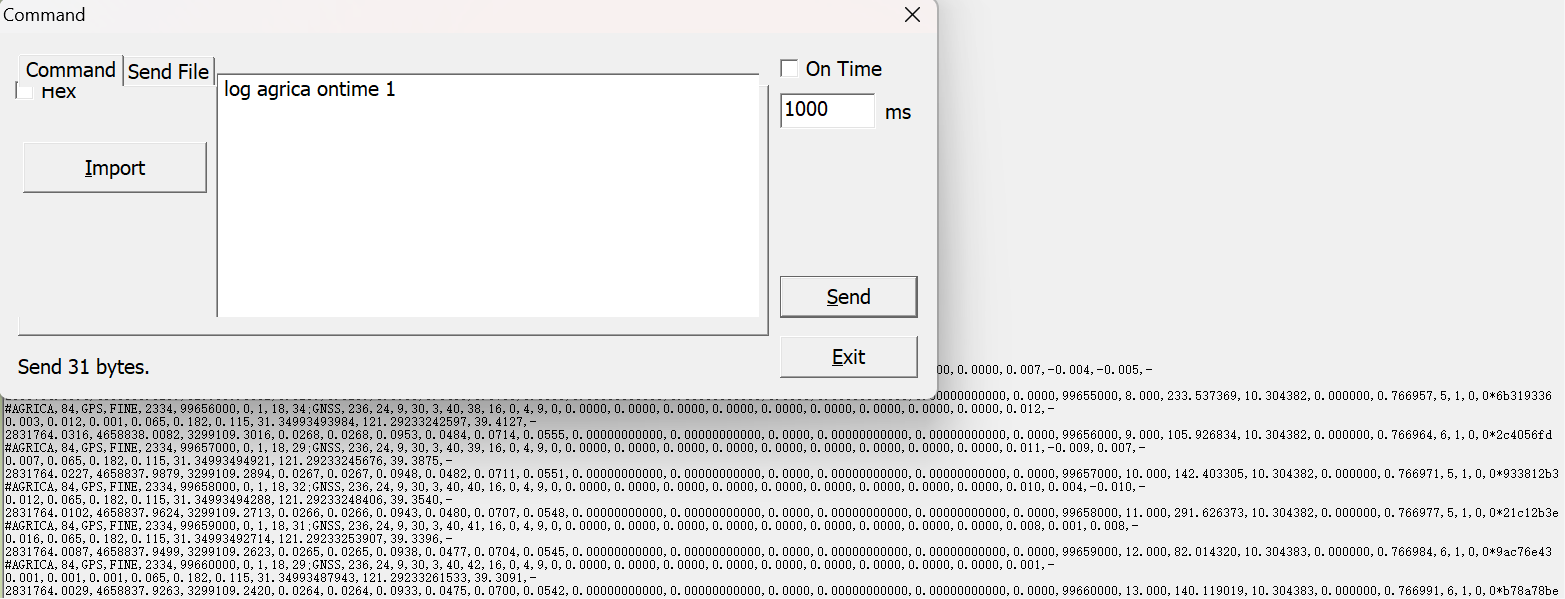
Fig.8 Mensaje AGRIC
Comando de entrada: log agrica ontime 1
Aquí está el formato estándar de AGRIC:
#AGRICA,35,GPS,FINE,2223,283006000,0,1,18,27;GNSS,236,22,8,17,6,36,28,4,4,14,21,0,-7782.5864,-2000.3002,8.4380,0.0046,0.0056,0.0041,243.0610,-0.2899,0.0000,0.013,-0.010,0.008,-0.012,0.013,0.015,0.012,31.34996227620,121.29240322121,36.6529,-2831767.7449,4658831.1477,3299110.4542,0.0194,0.0194,0.0280,0.0043,0.0053,0.0039,31.42015535053,121.31342487993,23.1344,31.34994264898,121.29236881723,42.6828,283006000,1.000,139.352203,10.304612,2.753604,0.717130,0,0,0,0*acab1bc9 Aquí, 0.013 representa la velocidad del dispositivo GNSS, -0.010 es la velocidad hacia el norte, 0.008 es la velocidad hacia el este, y -0.012 es la velocidad en la dirección vertical.
9 DRONE
Este mensaje muestra la información de estado en tiempo real para el sistema de antena dual, incluyendo la velocidad de la antena maestra y los datos de precisión relacionados.
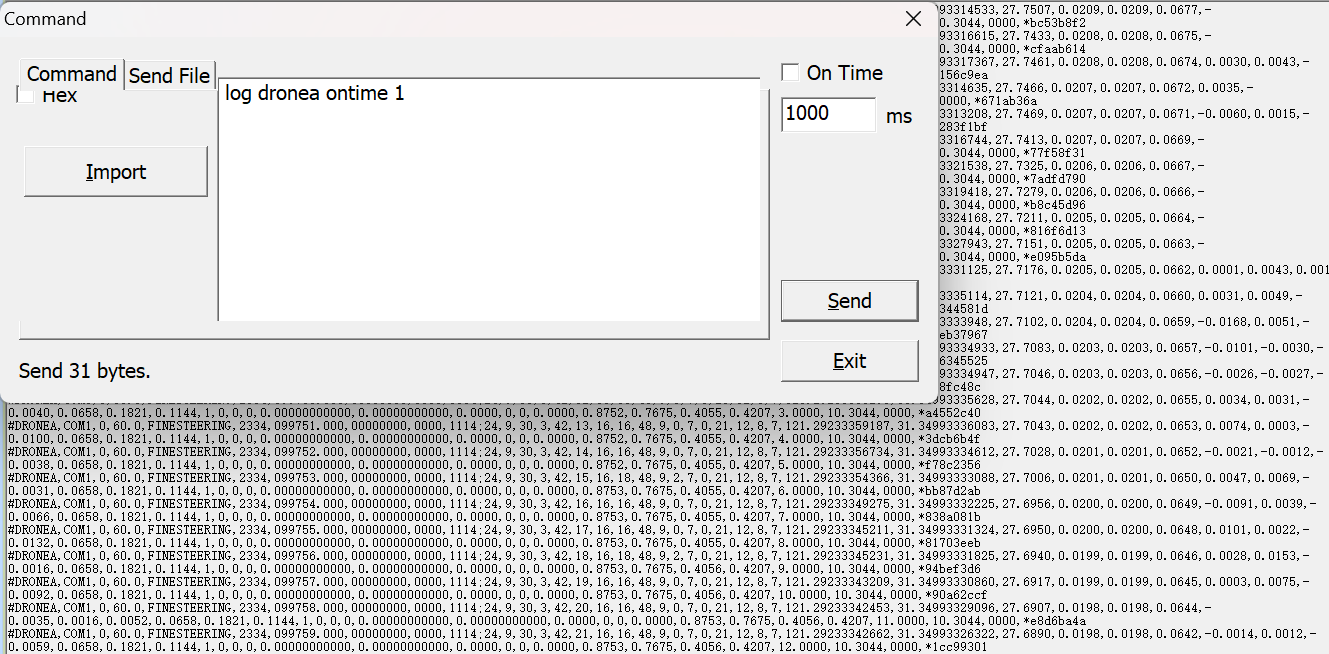
Fig.9 Mensaje DRONE
Comando de entrada: log dronea ontime 1
El formato estándar del mensaje DRONE es el siguiente:
#DRONE,COM1,0,60.0,FINESTEERING,2263,267570.000,00000000,0000,1114,23,5,24,2,19,12,1,45,45,21,12,7,5,21,12,7,5,121.29169275851,31.35089750559,27.8769,0.3036,0.3035,1.4278,0.0006,-0.0006,0.0146,0.0165,0.0024,0.0036,1,1,45,45,121.29162252337,31.35088292530,28.8125,1,4,248.7460,1.0419,0.8830,0.4550,0.5530,0.0000,10.3014,4096,*4ff8b7c6Donde -0.0006, 0.0006 y 0.0146 representan respectivamente la velocidad norte, este y la velocidad en el suelo.
NOTA: Las definiciones detalladas del mensaje se pueden encontrar en el manual OEM.
Acerca de la tecnología ComNav
ComNav Technology desarrolla y fabrica placas y receptores GNSS OEM para aplicaciones de posicionamiento de alta precisión. Su tecnología ya se ha utilizado en una amplia gama de aplicaciones, como topografía, construcción, control de máquinas, agricultura, transporte inteligente, sincronización precisa, monitoreo de deformaciones, sistemas no tripulados. Con un equipo dedicado a la tecnología GNSS, ComNav Technology está haciendo todo lo posible para suministrar productos confiables y competitivos a clientes de todo el mundo. ComNav Technology cotiza en la Bolsa de Valores de Shanghái (Junta de Ciencia y Tecnología), valores: ComNav Technology (Compass Navigation), código bursátil: 688592.
Acerca de SinoGNSS®
SinoGNSS® es la marca comercial oficial de ComNav Technology Ltd., registrada en la República Popular China, la UE, EE. UU. y Canadá. Todas las demás marcas comerciales son propiedad de sus respectivos dueños.