Tecnología PPP+IMU para Navegación de Vehículos
 1 Posicionamiento PPP-HAS/B2B Gratuito
1 Posicionamiento PPP-HAS/B2B Gratuito
ComNav ofrece con orgullo servicios gratuitos de PPP-HAS/B2B, con sus placas OEM de la serie K8 que proporcionan ahorros significativos en costos para los clientes, mientras logran una precisión de posicionamiento horizontal de hasta 20 cm. En los dos años desde su lanzamiento, esta tecnología ha ganado un amplio reconocimiento en el mercado, ofreciendo soluciones de posicionamiento de alta precisión a los clientes.
El Posicionamiento de Punto Preciso (PPP) es una tecnología de alta precisión basada en un solo receptor GNSS. A diferencia de los métodos de posicionamiento diferencial como RTK, el PPP no requiere ninguna infraestructura local, como estaciones de referencia que operan continuamente.
2 ¿Qué Desafío Enfrenta el Posicionamiento PPP?
Sin embargo, la tecnología de PPP única enfrenta desafíos en escenarios que implican bloqueo o interrupción de señales. Durante la obstrucción de la señal, el sistema debe volver a converger, lo que normalmente toma un tiempo considerable para regresar a un estado de alta precisión.
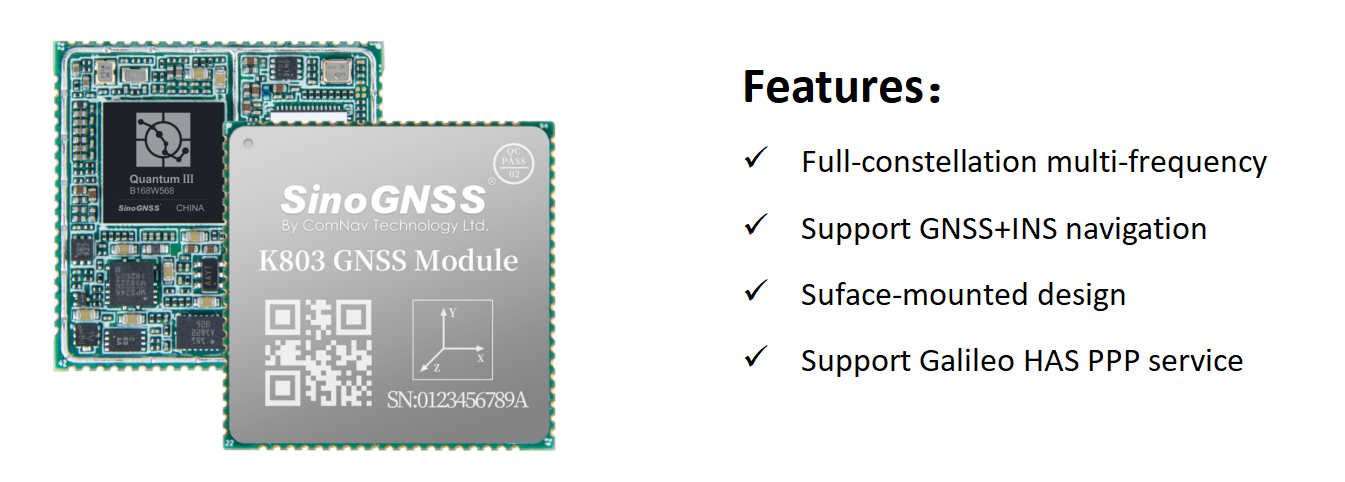
Para abordar este problema, el equipo de I+D de ComNav introdujo la tecnología de Unidad de Medida Inercial (IMU). La IMU puede operar de manera independiente sin depender de señales externas, lo que le permite proporcionar información de navegación estable incluso en entornos restringidos de señal, como túneles o configuraciones subterráneas, aunque sus errores de navegación pueden aumentar con el tiempo.
3 Solución: Integración de PPP + IMU
PPP logra un posicionamiento de alta precisión a través de señales de satélite, mientras que las IMU aseguran la continuidad de la navegación durante breves interrupciones de señal. La combinación de PPP y IMU aprovecha efectivamente las fortalezas de ambas tecnologías; en casos de pérdida de señal GNSS, la asistencia del INS no solo mantiene una trayectoria de posicionamiento continua, sino que también acelera la convergencia de PPP cuando se restaura la señal.
Este enfoque combinado demuestra un potencial significativo en entornos abiertos, como carreteras y áreas remotas, asegurando la precisión del posicionamiento mientras mejora enormemente la adaptabilidad y estabilidad del sistema en condiciones complejas.

4 DPrueba Dinámica
Realizamos pruebas utilizando la placa K803 con la navegación combinada PPP+IMU, y los resultados mostraron que esta solución integrada proporciona trayectorias de posicionamiento continuas. Puede cambiar sin problemas a la guía inercial durante períodos de mala señal satelital o interrupciones repentinas, ofreciendo así un nivel de posicionamiento más confiable, y puede regresar rápidamente a la ubicación correcta después de pasar por un túnel.

Fig. Diagrama de la Ruta de Prueba, la Trayectoria en el Diagrama es el Dato de Posición Registrado por la Placa K803
a. Entorno Abierto

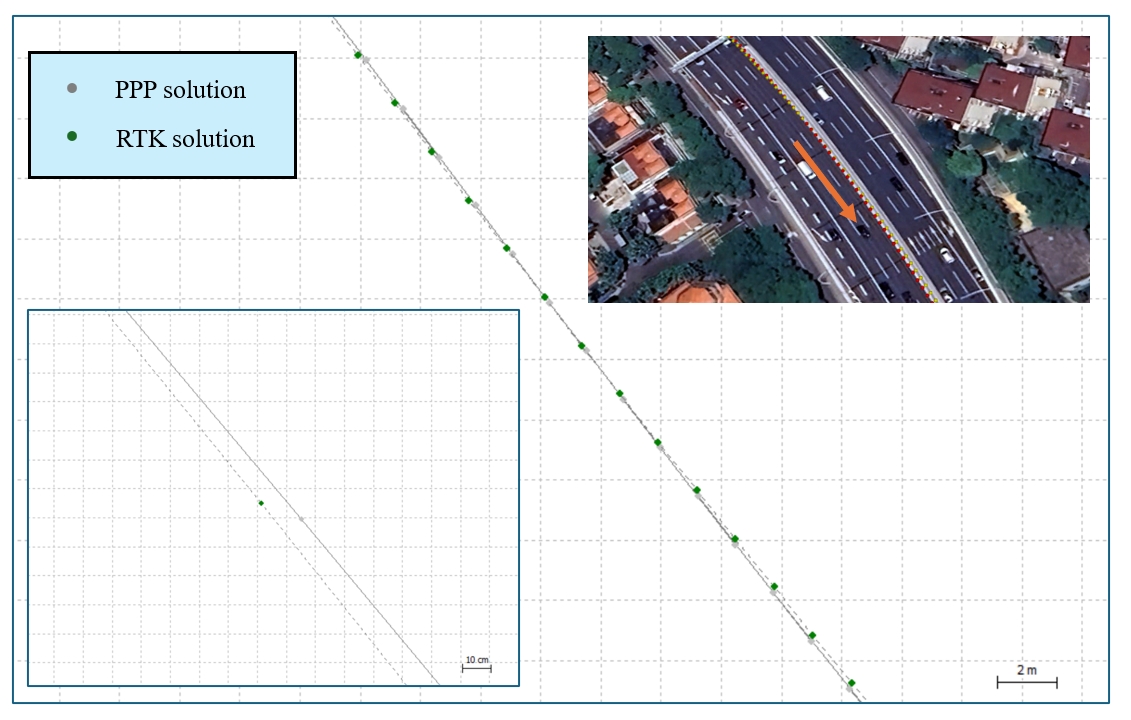
En entornos abiertos, el PPP-HAS/B2b muestra un gran rendimiento. Después de completar la convergencia del PPP, puede mantener un estado de solución PPP estable, y comparado con el resultado de RTK en tiempo real, la precisión del PPP en cielo abierto es de alrededor de 10 cm.
b. A través de Obstrucciones Temporales

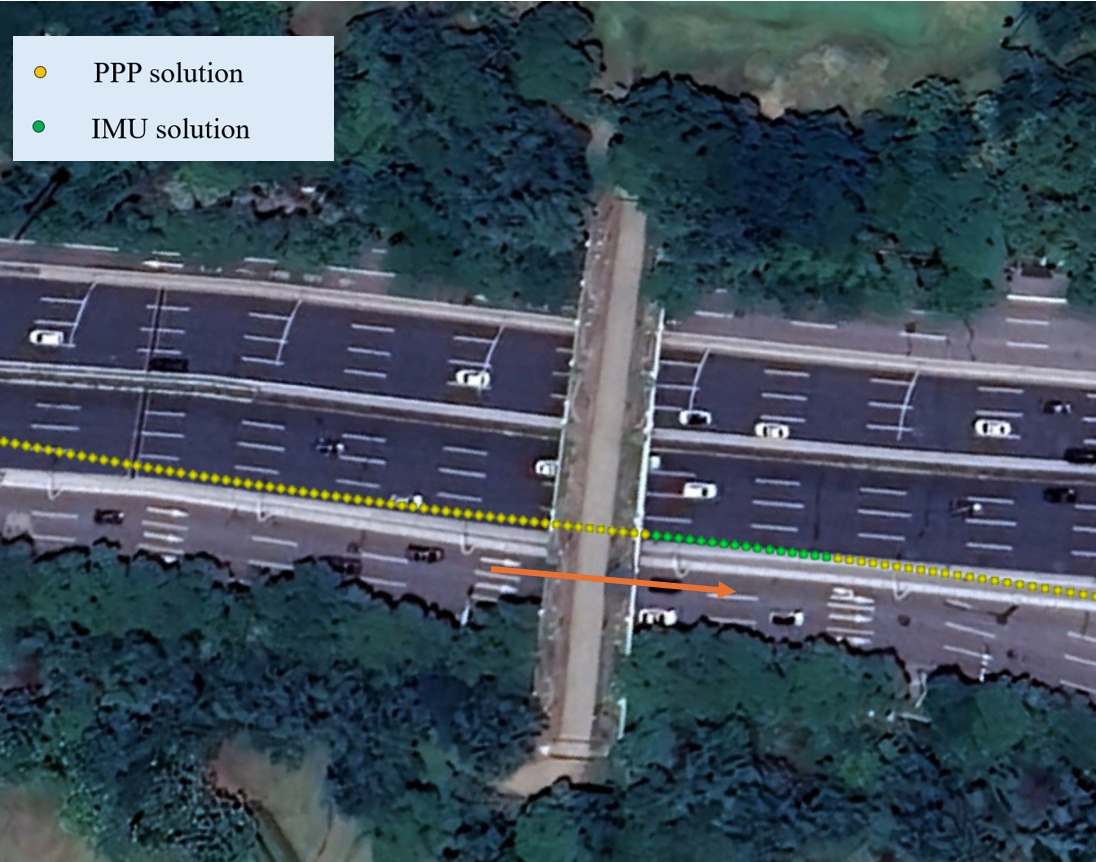
Cuando un vehículo pasa por debajo de obstrucciones breves como pasos elevados, las señales satelitales se pierden momentáneamente. En tales casos, cambia rápidamente a posicionamiento IMU para mantener una trayectoria continua. Dado que el tiempo de tránsito es corto, el error de posicionamiento IMU permanece mínimo antes de que se reanude el posicionamiento PPP, asegurando un posicionamiento continuo y preciso.
c. A través del Cañón Urbano


En áreas urbanas densamente construidas, la obstrucción severa de señales puede hacer que el PPP salga de su estado de convergencia y entre en un estado de reconvergencia. En esta situación, aunque la precisión del PPP puede disminuir, aún puede mantener una salida de posicionamiento continua y fluida.
d. A través de los Túneles


Después de entrar en un túnel, el posicionamiento del vehículo cambiará a navegación IMU debido a la pérdida de señales GNSS, asegurando la continuidad de la trayectoria. Sin embargo, dado que la precisión de la IMU puede divergir con el tiempo, cuanto más largo sea el túnel, mayor será el desplazamiento posicional que ocurre. La figura anterior muestra que después de que el vehículo pasa por un túnel de 2.5 km, hay un cierto grado de desplazamiento posicional, lo cual es esperado. Además, podemos ver que cuando se restaura la señal GNSS, el PPP puede regresar a una posición relativamente precisa, lo cual es un resultado prometedor.
Acerca de la tecnología ComNav
ComNav Technology desarrolla y fabrica placas y receptores GNSS OEM para aplicaciones de posicionamiento de alta precisión. Su tecnología ya se ha utilizado en una amplia gama de aplicaciones, como topografía, construcción, control de máquinas, agricultura, transporte inteligente, sincronización precisa, monitoreo de deformaciones, sistemas no tripulados. Con un equipo dedicado a la tecnología GNSS, ComNav Technology está haciendo todo lo posible para suministrar productos confiables y competitivos a clientes de todo el mundo. ComNav Technology cotiza en la Bolsa de Valores de Shanghái (Junta de Ciencia y Tecnología), valores: ComNav Technology (Compass Navigation), código bursátil: 688592.
Acerca de SinoGNSS®
SinoGNSS® es la marca comercial oficial de ComNav Technology Ltd., registrada en la República Popular China, la UE, EE. UU. y Canadá. Todas las demás marcas comerciales son propiedad de sus respectivos dueños.