Servicio B2b de Beidou y tecnología B2b-PPP
PPP-B2b, la primera señal de alta precisión del Sistema de Navegación por Satélite (BDS) de Beidou lanzada públicamente, es transmitida por tres satélites de órbita geosíncrona (GEO) de Beidou para proporcionar a los usuarios servicios abiertos y gratuitos de alta precisión. La tecnología ComNav lleva a cabo investigaciones relacionadas con la señal PPP-B2b y aplica la tecnología PPP-B2b y el algoritmo de posicionamiento de punto de precisión (PPP) en tiempo real a productos de alta precisión, logrando un posicionamiento de alta precisión en tiempo real sin depender de las redes de comunicación. Esto es de gran importancia para aplicaciones de alta precisión en la investigación científica, la topografía y la cartografía, el desarrollo marino, la agricultura y otros campos.
 1 Introducción a PPP-B2b
1 Introducción a PPP-B2b
El Sistema Mundial de Navegación por Satélite Beidou (BDS-3), la tercera etapa de la construcción y el desarrollo del sistema Beidou, consta de 30 satélites, incluidos 3 satélites de órbita geosíncrona (GEO), 3 satélites de órbita geosíncrona inclinada (IGSO) y 24 satélites de órbita terrestre media (MEO). El sistema global de Beidou no solo puede proporcionar a los usuarios globales servicios de posicionamiento y navegación, cronometraje y búsqueda y rescate internacional, sino también servicios de comunicación regionales que incluyen SBAS, GBAS, PPP y mensajes cortos regionales para usuarios en el área de Asia-Pacífico.
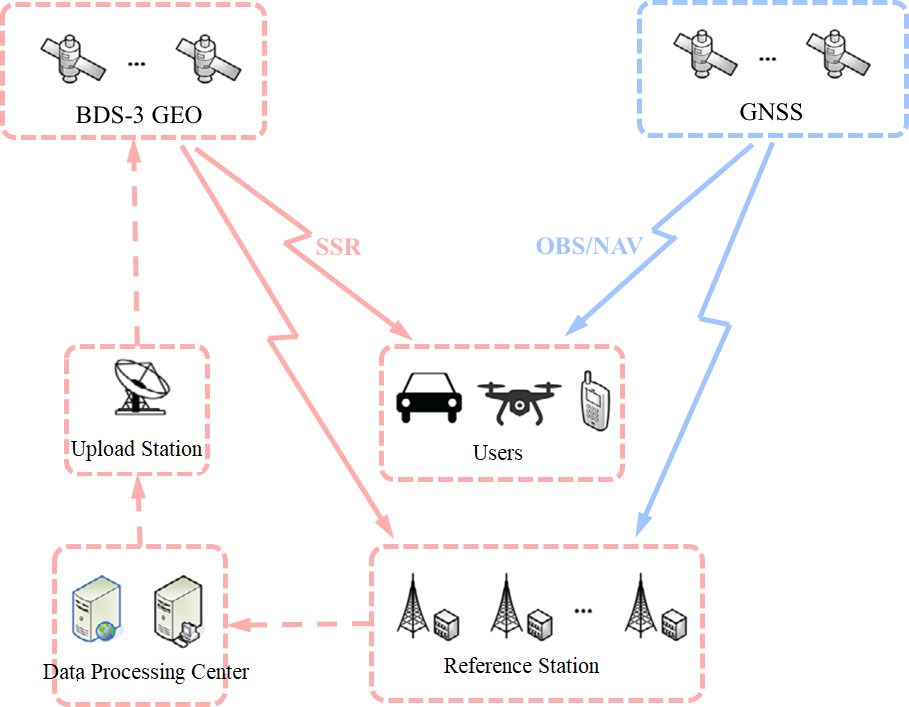
Figura 1 Sistema de servicio PPP BDS-3
El sistema de servicio PPP BDS-3 (véase la figura 1), basado en la señal PPP-B2b como canal de difusión de datos de corrección, como la órbita y el desplazamiento del reloj del sistema mundial Beidou y otros sistemas mundiales de navegación por satélite en la zona de Asia y el Pacífico, proporciona a los usuarios servicios abiertos y gratuitos de alta precisión. En primer lugar, la estación de referencia genera información de observación de pseudoalcance y portadora y recopila datos meteorológicos después de la supervisión continua de todos los satélites visibles y, a continuación, envía los datos brutos al centro de procesamiento de datos a través de la red después del procesamiento previo. En segundo lugar, el centro de procesamiento de datos verifica y evalúa los datos brutos y, a continuación, calcula el error de órbita del satélite y el error de reloj para generar datos de corrección y otra información de mejora pertinente de acuerdo con los protocolos, transmitidos a los satélites GEO por la estación de carga. Finalmente, los satélites GEO transmitirán la señal PPP-B2b y se puede realizar PPP en tiempo real después de que el usuario reciba la información de corrección.
2 PPP-B2b Estructura de la señal
En la Fig. 2 se muestra la estructura básica de trama de los datos del mensaje de señal PPP-B2b. Cada trama de datos de mensaje se compone de 486 bits. Entre ellos, los 6 bits más altos indican el tipo de mensaje, los 24 bits más bajos son el bit de verificación de redundancia cíclica (CRC) y los 456 bits intermedios son el campo de datos. Los contenidos específicos están determinados por sus correspondientes tipos de mensajes. Cada tipo de datos de mensaje también define su propio estándar de diseño para facilitar la decodificación y el uso.
Después de una codificación LDPC de 64 arios (162, 81), la longitud de trama será de 972 símbolos. Estos símbolos se concatenarán junto con 16 símbolos del preámbulo, 6 símbolos del PRN y 6 símbolos de las banderas reservadas para formar 1000 símbolos en total.
Los tipos de mensajes definidos se muestran en el Cuadro 1. Sin embargo, actualmente solo se transmiten los primeros cuatro tipos de mensajes y son solo para satélites BDS-3 y GPS. Con el fin de garantizar la correlación entre el contenido de la información que emiten los diferentes tipos de mensajes, así como la correlación entre el mensaje de corrección y las efemérides de emisión, los mensajes se identifican mediante cuatro números de versión de IOD SSR, IODP, IODN y IOD Corr, para facilitar la correspondencia y el uso.
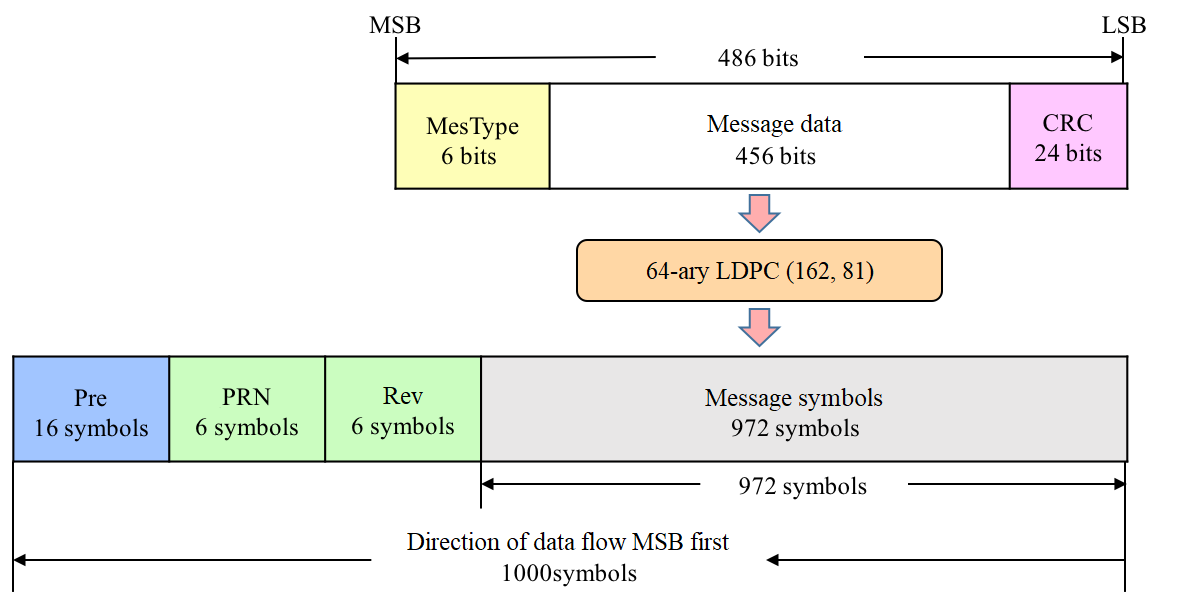
Figura 2 Estructura del marco de mensajes de navegación PPP-B2b
Cuadro 1 Tipos de mensajes definidos por PPP-B2b
Tipos de mensajes | Contenido de la información |
1 | Máscara satelital |
número arábigo | Corrección de la órbita del satélite y precisión del alcance del usuario |
3 | Sesgo de código diferencial |
4 | Corrección del reloj satelital |
5 | Precisión del rango de usuario |
6 | Corrección de reloj y corrección de órbita – combinación 1 |
7 | Corrección de reloj y corrección de órbita – combinación 2 |
8-62 | Reservado |
63 | Mensaje nulo |
Los tipos de mensajes definidos se muestran en el Cuadro 1. Sin embargo, actualmente solo se transmiten los primeros cuatro tipos de mensajes y son solo para satélites BDS-3 y GPS. Con el fin de garantizar la correlación entre el contenido de la información que emiten los diferentes tipos de mensajes, así como la correlación entre el mensaje de corrección y las efemérides de emisión, los mensajes se identifican mediante cuatro números de versión de IOD SSR, IODP, IODN y IOD Corr, para facilitar la correspondencia y el uso.
3 Revisión y desarrollo de la tecnología PPP-B2b
La serie K8 de SinoGNSS admite la señal PPP-B2b con una frecuencia central de 1207,14 MHz y un ancho de banda de 20,46 MHz. Sobre la base de este soporte de hardware, el equipo de investigación y desarrollo de ComNav Technology realizó el posicionamiento preciso de puntos en K8-EVK a través del servicio PPP-B2b.
3.1 Bases teóricas3.1.1 Tecnología PPP (Precise Point Positioning)La tecnología PPP (Precise Point Positioning) significa que después de corregir cada error mediante el uso de mensajes precisos de órbita y reloj del satélite, se logran resultados de posicionamiento de alta precisión a través de los datos de observación corregidos de un solo receptor GNSS.Durante el posicionamiento preciso del punto, cada error en la medición GNSS debe corregirse con precisión. En el Cuadro 2 se enumeran las principales fuentes de error en la medición GNSS y los métodos de corrección correspondientes.
Tabla 2: Principal fuente de error en la medición GNSS
Errores | Método de corrección |
Errores del reloj satelital | Corrección de reloj (PPP-B2b) |
Satellite orbit errors | Orbit correction (PPP-B2b) |
Satellite hardware delay | Pseudo-range: TGD/DCB |
Satellite antenna phase center offset | Model correction |
Retardos ionosféricos | Combinación libre de ionosfera |
Retrasos troposféricos | Corrección del modelo + Estimación de parámetros |
Efecto de rotación de la Tierra | Corrección del modelo |
Efecto de la teoría de la relatividad | Corrección del modelo |
Influencia de las mareas | Corrección del modelo |
Errores de reloj del receptor | Estimación de parámetros |
Retardo de hardware del receptor | (Incluido en los errores de reloj del receptor) |
Ambigüedad de enteros | Estimación de parámetros |
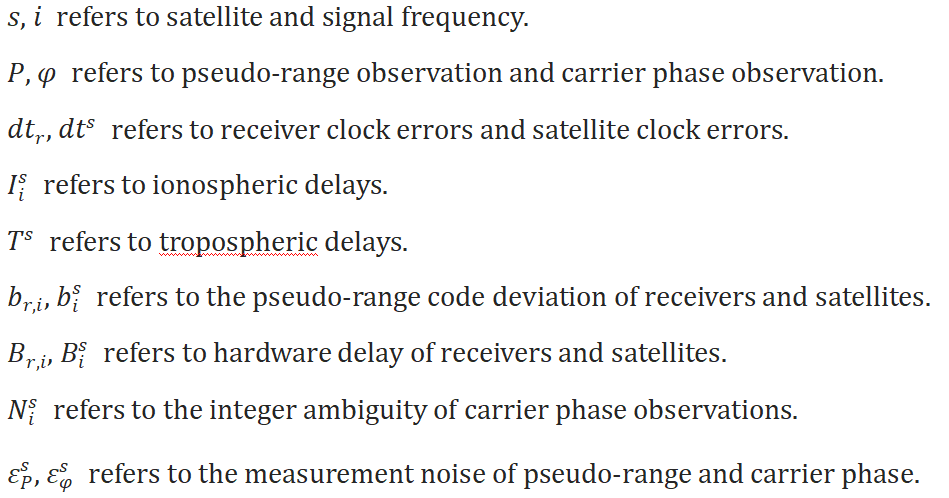
En PPP, se adoptan principalmente las observaciones de pseudorango y fase portadora. De acuerdo con la geometría y las fuentes de error del posicionamiento GNSS, la ecuación de observación se puede expresar de la siguiente manera:

3.1.2 Corrección de la órbita del satélite
En las correcciones de señal PPP-B2b, el intervalo de tiempo de época de las correcciones orbitales en el mensaje 2 es de 48 segundos. La información transmitida sobre la corrección de la órbita incluye las componentes del vector de corrección de la órbita  en las direcciones radial, tangencial y normal. El vector
en las direcciones radial, tangencial y normal. El vector  de corrección de la posición del satélite puede calcularse mediante correcciones orbitales. Cuando la IODN del mensaje de corrección orbital coincide con la IODE de los mensajes de navegación, se puede corregir el vector de posición del satélite
de corrección de la posición del satélite puede calcularse mediante correcciones orbitales. Cuando la IODN del mensaje de corrección orbital coincide con la IODE de los mensajes de navegación, se puede corregir el vector de posición del satélite  calculado a partir de las efemérides de radiodifusión, la fórmula de corrección es la siguiente:
calculado a partir de las efemérides de radiodifusión, la fórmula de corrección es la siguiente:

La fórmula de cálculo del vector de corrección de la posición del satélite es la siguiente,
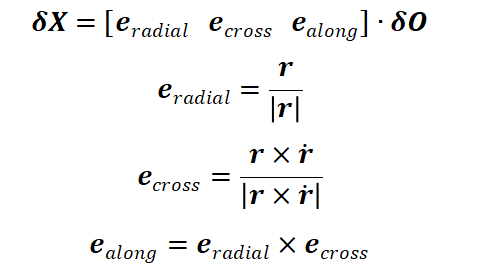
En la fórmula,  se refiere a la posición del satélite y al vector de velocidad en las efemérides de radiodifusión,
se refiere a la posición del satélite y al vector de velocidad en las efemérides de radiodifusión,  corresponden a los vectores unitarios en las direcciones radial, tangencial y normal.
corresponden a los vectores unitarios en las direcciones radial, tangencial y normal.
3.1.3 Corrección del reloj de satélite
El intervalo de tiempo de época de las correcciones de reloj en el mensaje PPP-B2b 4 es de 6 segundos. Una vez que el mensaje de corrección de reloj coincide con éxito con las efemérides de transmisión, el error  de reloj calculado a partir de las efemérides de transmisión se puede corregir mediante el mensaje
de reloj calculado a partir de las efemérides de transmisión se puede corregir mediante el mensaje  de corrección de reloj, la fórmula es la siguiente,
de corrección de reloj, la fórmula es la siguiente,

Cuando los identificadores de Corr de la DSI de los mensajes 2 y 4 son los mismos y la DROD de los mensajes 2 y 4 puede coincidir con la IODE de los mensajes de navegación, la corrección de órbita y las correcciones de reloj pueden utilizarse conjuntamente para corregir los errores.
3.2 Implementación del algoritmoEn la Figura 3 se muestra el diagrama del algoritmo PPP basado en el servicio PPP-B2b, que se compone principalmente de 5 pasos.
1) Entrada de datos. Aparte de los datos básicos de observación del GNSS y las efemérides de radiodifusión, también se requieren los mensajes PPP-B2b.
2) Preprocesamiento de datos. Adquiera los datos de corrección detallados decodificando los mensajes PPP-B2b. Y es necesario hacer coincidir los identificadores de diferentes mensajes para garantizar que los datos de corrección se puedan utilizar para una corrección precisa y efectiva, incluida la coincidencia de mensajes de navegación y datos de corrección, y la coincidencia de diferentes tipos de datos de corrección.
3) Tratamiento de datos. Este paso consiste en procesar varios errores en los datos GNSS. El error de órbita del satélite y el error del reloj del satélite pueden corregirse mediante los datos de corrección proporcionados por los mensajes PPP-B2b. El retardo ionosférico puede eliminarse mediante una combinación libre de ionosfera. Y algunos errores pueden ser corregidos por modelos estándar. También se requiere el rechazo de errores graves y la detección de deslizamiento de ciclo. Después de la corrección y el procesamiento anteriores, se obtienen la posición precisa del satélite, el pseudoalcance y la fase de la portadora.
4) Estimación de parámetros. Estime los parámetros desconocidos en función del filtrado de Kalman, incluidas las coordenadas de la estación y algunos errores no corregidos en el paso anterior, como el error del reloj del receptor, la ambigüedad de los enteros y el retardo troposférico.
5) Salida de resultados. Después del procesamiento, puede generar resultados PPP que incluyen coordenadas de la estación, precisión de posicionamiento, DOP, RMS y otra información.
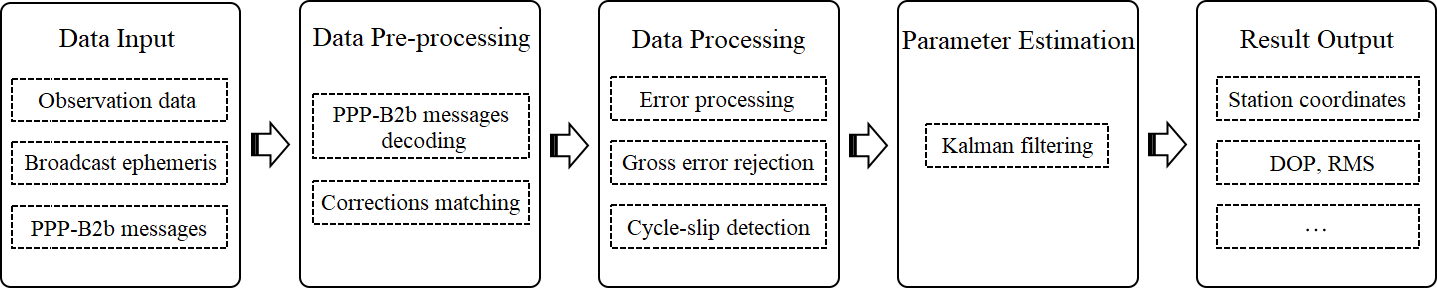
Figura 3 Diagrama del algoritmo PPP basado en el servicio PPP-B2b
The R&D team of ComNav Technology conducted a 10hrs dynamic test of above algorithm on K8-EVK and the positioning results are shown in Figure 4 and Table 3. The PPP accuracy achieves 6cm horizontally and 8cm vertically after 13 minutes of convergence, which can satisfy most high precision positioning requirements.

Figura 4 Precisión PPP de K8-EVK
Tabla 3: Resultado de posicionamiento
Precisión horizontal | RMS:0.0603m |
95%:0.0993m | |
Precisión vertical | RMS:0.0849m |
95%:0.1979m | |
Tiempo de convergencia horizontal | 705s/10cm |
Tiempo de convergencia vertical | 765s/20cm |
Número de muestras | 36001 Épocas,1Hz |
4 Los beneficios del servicio PPP-B2b
Las ventajas de la tecnología de Posicionamiento de Puntos de Precisión en tiempo real basada en servicios PPP-B2b se reflejan en tres aspectos:
En comparación con las APP comerciales tradicionales, es abierta y gratuita;
Puede proporcionar un servicio de posicionamiento de precisión de nivel de decímetro de área amplia dentro del rango de servicio, sin estar restringido por factores como la distancia de la estación base, la integridad y la calidad de los datos diferenciales. Esto significa que parte de las operaciones de RTK serán reemplazadas.
El algoritmo PPP-b2b se realiza al recibir los datos de telegramas transmitidos a través de los satélites globales Beidou en lugar de depender de la red para recibir activamente otra información externa, lo que hace que el proceso de posicionamiento sea más estable y confiable.
Desde el punto de vista de la aplicación, la tecnología de posicionamiento de puntos de precisión basada en PPP-B2b puede proporcionar a los usuarios servicios de alta precisión en entornos en los que RTK es inestable o está descubierto. Mientras tanto, puede resolver los problemas en áreas como el desierto de Gobi, las minas y los mares donde el servicio CORS no se puede cubrir y la estación base es difícil de instalar.
En la actualidad, el módulo de posicionamiento de alta precisión K803 y K803S y el kit de evaluación de K803_EVK han sido compatibles con el servicio de alta precisión PPP-B2b. Este servicio se implementará posteriormente en módulos de alta precisión como los módulos K802 y K823 para que los usuarios puedan obtener y utilizar fácilmente la función PPP-B2b después de integrar los módulos directamente.
Nota:
En la actualidad, la cobertura de la señal BeiDou PPP-B2b solo incluye la región de Asia-Pacífico.
Acerca de la tecnología ComNav
ComNav Technology desarrolla y fabrica placas y receptores GNSS OEM para aplicaciones de posicionamiento de alta precisión. Su tecnología ya se ha utilizado en una amplia gama de aplicaciones, como topografía, construcción, control de máquinas, agricultura, transporte inteligente, sincronización precisa, monitoreo de deformaciones, sistemas no tripulados. Con un equipo dedicado a la tecnología GNSS, ComNav Technology está haciendo todo lo posible para suministrar productos confiables y competitivos a clientes de todo el mundo. ComNav Technology cotiza en la Bolsa de Valores de Shanghái (Junta de Ciencia y Tecnología), valores: ComNav Technology (Compass Navigation), código bursátil: 688592.
Acerca de SinoGNSS®
SinoGNSS® es la marca comercial oficial de ComNav Technology Ltd., registrada en la República Popular China, la UE, EE. UU. y Canadá. Todas las demás marcas comerciales son propiedad de sus respectivos dueños.