Technologie PPP+IMU pour la navigation des véhicules
 1 Positionnement PPP-HAS/B2B gratuit
1 Positionnement PPP-HAS/B2B gratuit
ComNav propose fièrement des services PPP-HAS/B2B gratuits, avec ses cartes OEM de la série K8 offrant des économies substantielles pour les clients, tout en atteignant une précision de positionnement horizontal allant jusqu'à 20 cm. Depuis son lancement il y a deux ans, cette technologie a été largement reconnue sur le marché, fournissant des solutions de positionnement haute précision aux clients.
Le Positionnement de Point Précis (PPP) est une technologie de haute précision basée sur un seul récepteur GNSS. Contrairement aux méthodes de positionnement différentiel telles que le RTK, le PPP ne nécessite aucune infrastructure locale, comme des stations de référence en fonctionnement continu.
2 Quel défi le positionnement PPP rencontre-t-il ?
Cependant, la technologie PPP unique fait face à des défis dans des scénarios impliquant un blocage ou une interruption du signal. Lors d'une obstruction du signal, le système doit se reconverger, ce qui prend généralement un temps considérable pour retrouver un état de haute précision.
Pour remédier à ce problème, l'équipe de R&D de ComNav a introduit la technologie de l'Unité de Mesure Inertielle (IMU). L'IMU peut fonctionner de manière indépendante sans s'appuyer sur des signaux externes, lui permettant de fournir des informations de navigation stables même dans des environnements à signal restreint, tels que des tunnels ou des espaces souterrains, bien que ses erreurs de navigation puissent augmenter avec le temps.
3 Solution : Intégration PPP + IMU
Le PPP atteint un positionnement de haute précision grâce aux signaux satellites, tandis que les IMU garantissent la continuité de la navigation pendant de brèves interruptions du signal. La combinaison de PPP et d'IMU exploite efficacement les forces des deux technologies ; en cas de perte de signal GNSS, l'assistance INS non seulement maintient une trajectoire de positionnement continue, mais accélère également la convergence du PPP lorsque le signal est rétabli.
Cette approche combinée démontre un potentiel significatif dans des environnements ouverts, tels que les autoroutes et les zones reculées, garantissant la précision du positionnement tout en améliorant considérablement l'adaptabilité et la stabilité du système dans des conditions complexes.

4 DTest dynamique
Nous avons effectué des tests en utilisant la carte K803 avec la navigation PPP+IMU, et les résultats ont montré que cette solution intégrée fournit des trajectoires de positionnement continues. Elle peut passer sans effort à la guidance inertielle pendant les périodes de faible signal satellite ou d'interruption soudaine, offrant ainsi un niveau de positionnement plus fiable, et elle peut rapidement revenir à la bonne position après avoir traversé un tunnel.

Fig. Diagramme du chemin de test, la trajectoire dans le diagramme est les données de position enregistrées par la carte K803
a. Environnement ouvert

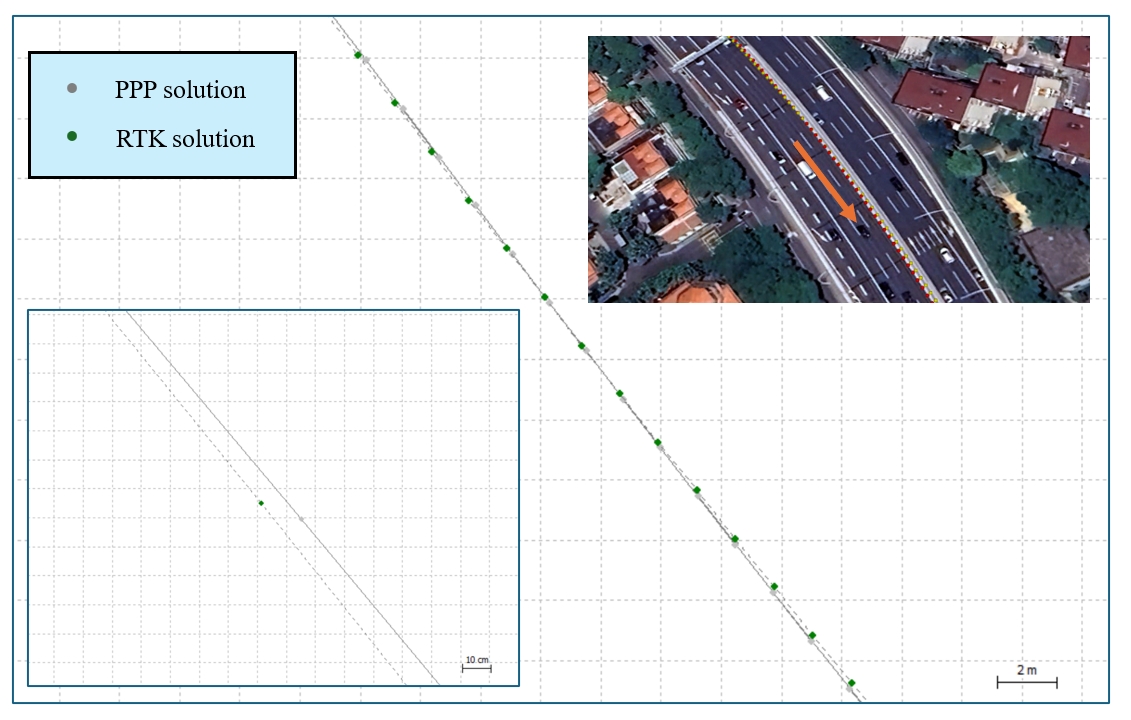
Dans des environnements ouverts, le PPP-HAS/B2B montre de très bonnes performances. Une fois la convergence PPP complétée, il peut maintenir un statut de solution PPP stable, et comparé aux résultats RTK en temps réel, la précision PPP sous le ciel ouvert est d'environ 10 cm.
b. À travers des obstructions temporaires

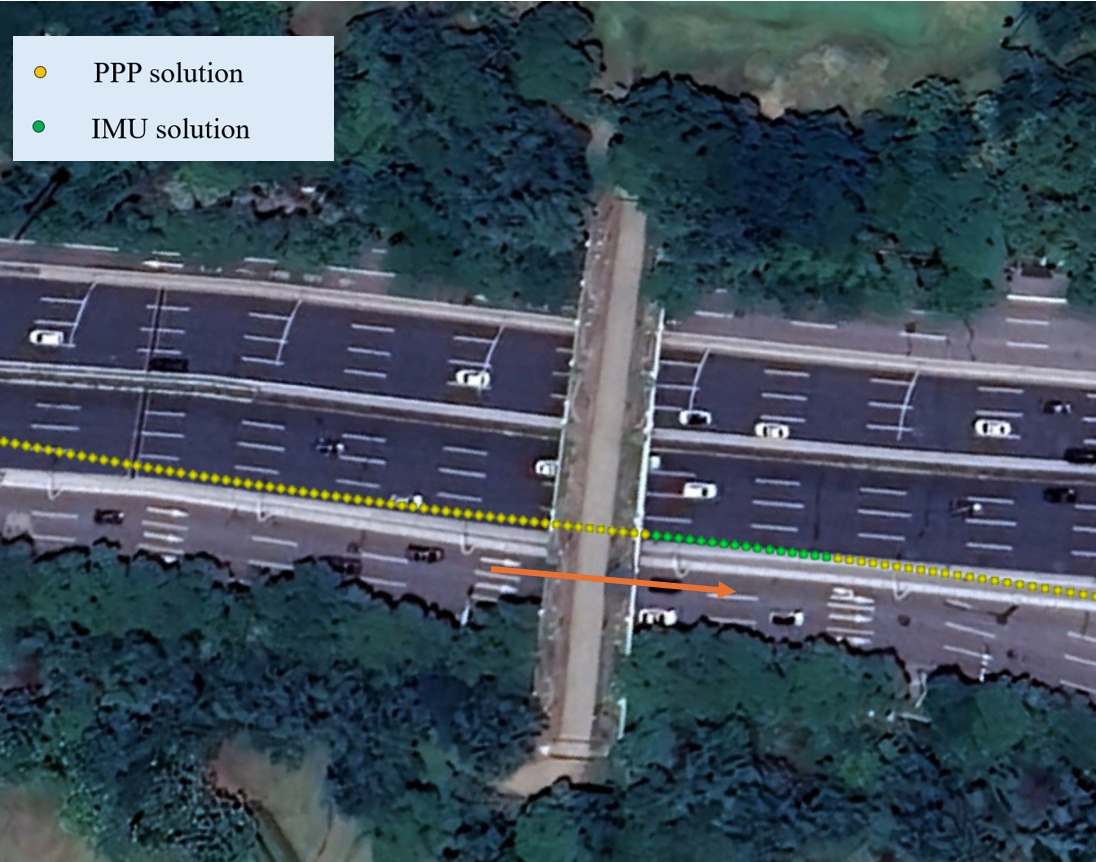
Lorsqu'un véhicule passe sous des obstructions temporaires comme des viaducs, les signaux satellites sont momentanément perdus. Dans de tels cas, il passe rapidement au positionnement IMU pour maintenir une trajectoire continue. Étant donné que le temps de transit est court, l'erreur de positionnement IMU reste minimale avant que le positionnement PPP ne reprenne, assurant un positionnement continu et précis.
c. À travers le canyon urbain


Dans les zones urbaines densément bâties, une obstruction sévère du signal peut facilement amener le PPP à sortir de son état de convergence et à entrer dans un état de reconvergence. Dans cette situation, bien que la précision du PPP puisse diminuer, il peut toujours maintenir une sortie de positionnement continue et fluide.
d. À travers les tunnels


Après être entré dans un tunnel, le positionnement du véhicule passe à la navigation IMU en raison de la perte de signaux GNSS, assurant ainsi la continuité de la trajectoire. Cependant, étant donné que la précision de l'IMU peut diverger avec le temps, plus le tunnel est long, plus le décalage de position se produit. La figure ci-dessus montre qu'après que le véhicule ait traversé un tunnel de 2,5 km, il y a un certain degré de décalage de position, ce qui est attendu. De plus, nous pouvons voir que lorsque le signal GNSS est rétabli, le PPP est capable de revenir à une position relativement précise, ce qui est un résultat prometteur.
À propos de ComNav Technology
ComNav Technology développe et fabrique des cartes et des récepteurs GNSS OEM pour les applications de positionnement de haute précision. Sa technologie a déjà été utilisée dans un large éventail d’applications telles que l’arpentage, la construction, le contrôle des machines, l’agriculture, le transport intelligent, le chronométrage précis, la surveillance des déformations, les systèmes sans pilote. Avec une équipe dédiée à la technologie GNSS, ComNav Technology fait de son mieux pour fournir des produits fiables et compétitifs à des clients du monde entier. ComNav Technology a été cotée à la Bourse de Shanghai (Science and Technology Board), valeurs mobilières :ComNav Technology (Compass Navigation), Code boursier : 688592.
À propos de SinoGNSS®
SinoGNSS® est la marque officielle de ComNav Technology Ltd., déposée en République populaire de Chine, dans l’UE, aux États-Unis et au Canada. Toutes les autres marques sont la propriété de leurs propriétaires respectifs.