
Recomendar comandos para la integración del sistema
 1 Finalidad
1 Finalidad
A medida que más y más usuarios integran los módulos GNSS de alta precisión de ComNav en diversas aplicaciones, como robótica, UAV, topografía y cartografía, agricultura de precisión, conducción automática, para mejorar la depurabilidad del sistema, es aconsejable reservar un puerto para la comunicación con el módulo interno en los módulos GNSS de alta precisión de ComNav. Esto permite a los usuarios ver fácilmente la información del módulo en un momento posterior y acceder a los datos para su análisis cuando sea necesario.

2 Sugerencias para la integración
Para sistemas con memoria
Al diseñar dispositivos equipados con memoria interna, se recomienda encarecidamente incorporar una función que permita almacenar mensajes de depuración. Al igual que un archivo de registro normal, estos mensajes de depuración pueden ser invaluables para futuros fines de depuración, fácilmente accesibles cuando sea necesario. La implementación del almacenamiento cíclico o la eliminación programada, como semanalmente, garantiza que el uso de memoria siga siendo mínimo a la vez que ofrece una ayuda significativa para futuros esfuerzos de depuración. Además de almacenar mensajes predeterminados, proporcionar la capacidad de personalizar y almacenar mensajes específicos mejoraría en gran medida la funcionalidad del sistema.
Para el sistema sin memoria
Se recomienda que el sistema reserve un puerto serie para la comunicación con el módulo. Cuando sea necesario, el módulo se puede conectar a una computadora, para verificar la información, el estado y los datos de depuración para su análisis.
3 Recomendar mensajes
Aquí hay algunos mensajes personalizados muy prácticos recomendados para la integración de ComNav. Estos mensajes no solo se almacenan en la memoria de forma predeterminada durante la integración del sistema, sino que también sirven como valiosas fuentes de información para los usuarios durante las pruebas, lo que ayuda a la resolución de problemas.
1 SYSRTS
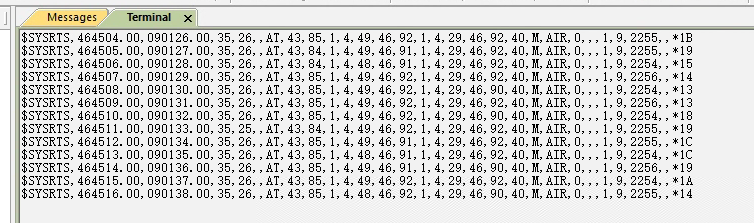
Este mensaje está diseñado para comprobar la información del sistema de forma exhaustiva. Proporciona detalles sobre el estado del satélite, la calidad de la señal, la interferencia potencial, la oclusión y la calidad de la señal de la estación base. También admite el examen de la información de doble antena maestro-esclavo.
El mensaje es particularmente útil en entornos con interferencia u oclusión, refleja de manera efectiva el estado del módulo y las condiciones ambientales.
Ejemplo de mensaje SYSRTS:
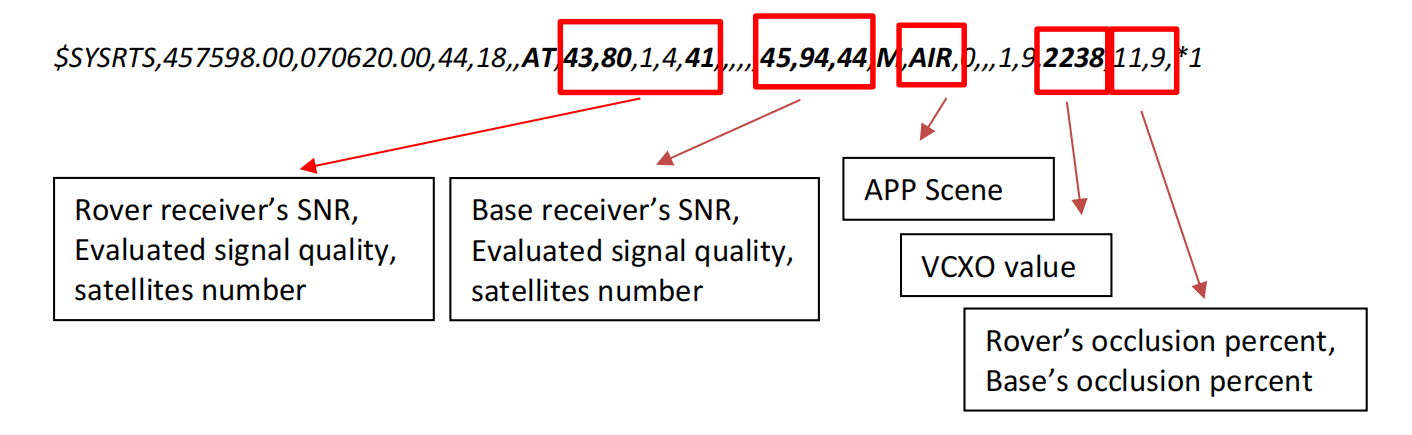
Después del signo "AT", muestra la información detallada sobre la calidad de la señal tanto para el receptor Rover como para el Base. Y al final del mensaje, da el porcentaje de oclusión evaluado. Normalmente, si la calidad de la señal evaluada >85 y el porcentaje de oclusión <20, el receptor puede funcionar con una solución estable en el entorno actual.
El modo disponible para APP Scene incluye topografía, robot, automóvil, aire, espacio, que se utiliza para diferentes aplicaciones. Obtenga más información en el manual de referencia:
CNT-OEM-RM001_Rev_2.3_20220507
El valor de VCXO es importante para el tiempo. A temperatura ambiente, el rango normal es de 2000 o 2400. Si el valor no está en este rango, puede hacer que "ontime X" "onchanged" no funcione.
K803 V610T5
K823 V609GI
2 KSXT
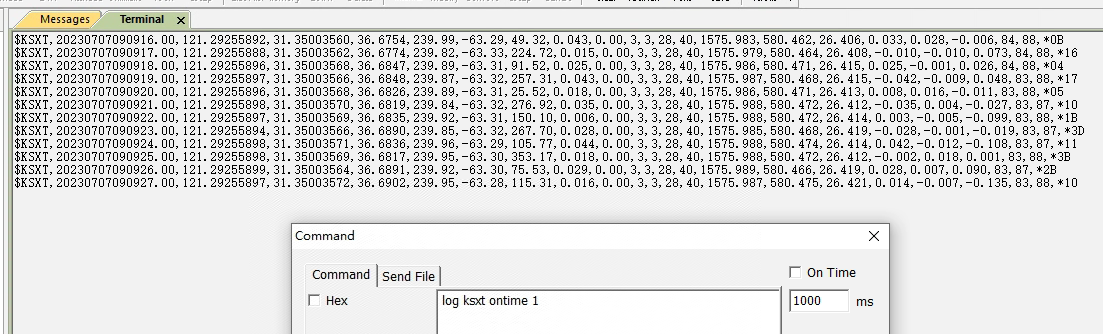
El mensaje KSXT ofrece información de posicionamiento, rumbo, velocidad, así como la distancia a la estación base y la calidad de la señal de las antenas maestra y esclava.
Está especialmente recomendado para sistemas de doble antena.
Ejemplo de mensaje KSXT:
$KSXT,20230707090927.00,121.29255897,31.35003572,36.6902,239.95,-63.28,115.31,
0.016,0.00,3,3,28,40,1575.987,580.475,26.421,0.014,-0.007,-0.135,83,88,*10
Se sugiere un valor > 85, para un mejor trabajo en el entorno actual.
K823 V609GI
Para obtener más información sobre la definición de los mensajes anteriores, consulte el Apéndice.
4 ApéndiceSYSRTS: Comprobación del estado del sistema en tiempo real
Descripción
Este mensaje incluye la información del sistema, la información de seguimiento de los satélites de la estación base, las estaciones maestra y esclava del rover, y la información sobre el estado operativo.
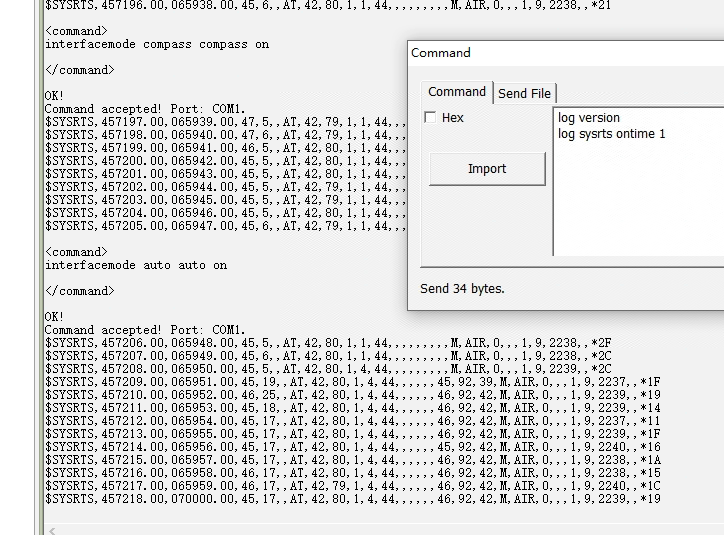
Entrada recomendada | Log sysrts ontime 1 |
Formato admitido | ASCII |
Respuesta (ASCII)
$SYSRTS,471765.80,110227.80,50,17,,AT,41,86,1,4,47,,,,,,41,85,48,M,ENCUESTA,0,,,0,9,2172,11,9*6A
| Campo# | Estructura | Descripción | Formato | Demostración |
|---|---|---|---|---|
| 1 | $ SYSRTS | Encabezado de registro | $ SYSRTS | |
| 2 | Hora GPS | Tiempo(s) GPS, correspondiente a la ubicación | ssssss.ss | 471765.80 |
| 3 | Hora UTC | Hora(s) UTC correspondiente a la ubicación | hhmmss.ss | 110227.80 |
| 4 | Utilización de interrupciones | 0~100 (%) | Xx | 50 |
| 5 | Utilización de la CPU | 0~100 (%) | Xx | 17 |
| 6 | Temperatura de la CPU | -50~150 (°C) | Xx | |
| 7 | Firmar | EN | EN | |
| 8 | ANT1 SNR | 0~100 (dB) | Xx | 41 |
| 9 | Calidad de la señal ANT1 | 0~100 En entornos sin obstrucciones y sin interferencias, una puntuación de ≥85 | Xx | 86 |
| 10 | Estado de la antena ANT1 | 0: Sin carga, 1: Normal, 2: Cortocircuito, 3: Diafonía | x | 1 |
| 11 | Estado de posicionamiento de ANT1 | Estado de la solución 0: Inicialización, 1: Único 2: Diferencial de código (incluida la solución SBAS) 4: Solución fija RTK 5: Solución flotante RTK | x | 4 |
| 12 | ANT1 SVn | Número de satélites rastreados ANT1, 0~256 | Xx | 47 |
| 13 | ANT2 SNR | 0 ~ 100 (dB) Nota: Si no hay estación esclava, los siguientes 4 elementos (14-17) estarán vacíos. | Xx | |
| 14 | Calidad de la señal ANT2 | 0~100 En entornos sin obstrucciones y sin interferencias, una puntuación de ≥85 | Xx | |
| 15 | Estado de la antena ANT2 | 0: Sin carga, 1: Normal, 2: Cortocircuito, 3: Diafonía | x | |
| 16 | Estado de la cabecera ANT2 | Estado de la solución 0: Inicialización 1: Único 2: Diferencial de código (incluida la solución SBAS) 4: Solución fija 5: Solución flotante | x | |
| 17 | ANT2 SVn | Número de satélites rastreados ANT2, 0~256 | Xx | |
| 18 | Estación base SNR | 0~100 (dB) Si los datos diferenciales de la estación base se envían en paquetes, este elemento se mostrará cíclicamente en función de la estrategia de paquetes. La "calidad de la señal de la estación base" y el "número de satélites rastreados de la estación base" siguen la misma estrategia. | Xx | 41 |
| 19 | Calidad de la señal de la estación base | 0~100 En entornos sin obstrucciones y sin interferencias, una puntuación de ≥85 | Xx | 85 |
| 20 | Estación base SVn | 0~256 | Xx | 48 |
| 21 | Firmar | M | M | |
| 22 | Modo de escena | Encuesta, robot, automóvil, aire, espacio | X | Encuesta |
| 23 | Índice de actividad ionosférica | 0~200 (mm) >50 indica que la ionosfera actual es relativamente activa | x | 0 |
| 24 | Indicación de interferencia | 0: Sin interferencias, 1: Interferencias detectadas | x | |
| 25 | Indicación de engaño | 0: Sin interferencias, 1: Interferencias detectadas | x | |
| 26 | IMU | 0: IMU desactivada; 1: IMU activada, inicialización fallida; 2: IMU activada, inicialización exitosa; 3: Se enciende la IMU y se completa la estimación de la orientación utilizando el estado combinado, ingresando al modelo de restricción cinemática del vehículo | x | 0 |
| 27 | Hora del sistema | 0~9 0: Hora del sistema no disponible, 1-8: Hora del sistema que se está ajustando, disponible pero inestable, 9: Hora del sistema estable y disponible | Xx | 9 |
| 28 | Valor del oscilador de cristal VCXO | Valor del oscilador de cristal controlado por voltaje (VCXO), que va de 0 a 9999. A temperatura ambiente, el rango normal es de 2000 a 2400. Este valor disminuye con el aumento de temperatura y aumenta con la disminución de la temperatura | xxxx | 2172 |
| 29 | Tasa de obstrucción de la estación Rover | Tasa de obstrucción = 100% - Recuento de satélites rastreados / Recuento teórico de satélites. Cuanto menor sea el valor, mejor será el rendimiento | x | 11 |
| 30 | Tasa de obstrucción de la estación base | x | 9 | |
| 31 | Checksum | Checksum | *Hh | *6A |
KSXT: Información de posicionamiento y rumbo
Descripción
Este mensaje incluye información del receptor GNSS, como la hora, la ubicación, la posición y el rumbo.
Entrada recomendada | Log sysrts ontime 1 |
Formato admitido | ASCII |
Respuesta (ASCII)
$KSXT,20220815021257.00,121.29235950,31.34993419,39.6784,77.93,51.29,50.16,0.001,0.00,1,3,40,
35,,,,0.001,0.001,0.007,71,88,*12
| Campo# | Estructura | Descripción | Formato | Demostración |
|---|---|---|---|---|
| 1 | $KSXT | Encabezado de registro | $KSXT | |
| 2 | Utc | Hora(s) UTC correspondiente a la ubicación | aaaa/mm/dd/hh/mm/ss | 20220815021257.00 |
| 3 | Lon | La longitud, en grados, mantiene 8 dígitos significativos después del punto decimal | xxx.xxxxxxxx | 121.29235950 |
| 4 | Años | La latitud, en grados, mantiene 8 dígitos significativos después del punto decimal | xx.xxxxxxxx | 31.34993419 |
| 5 | Height | La altitud, en grados, mantiene 4 dígitos significativos después del punto decimal | xx.xxxx | 39.6784 |
| 6 | Heading | Ángulo acimutal (0-360°), mantenga 2 dígitos significativos después del punto decimal | 77.93 | |
| 7 | Alquitrán | Ángulo de inclinación (±90 °), mantenga 2 dígitos significativos después del punto decimal | 51.29 | |
| 8 | Seguimiento verdadero | Ángulo de pista norte verdadero (0-360 °), mantenga 2 dígitos significativos después del punto decimal | 50.16 | |
| 9 | Vel | Velocidad: Unidad: km/h, mantener 3 dígitos significativos después del punto decimal | 0.001 | |
| 10 | Rodar | Ángulo de balanceo (±90 °), mantenga 2 dígitos significativos después del punto decimal | 0.00 | |
| 11 | Posición qual | Indicador de calidad de posicionamiento GNSS: 0 = corrección no disponible o no válida 1 = Posicionamiento de un solo punto 2 = flotador RTK 3 = Solución de ambigüedad fija RTK | x | 1 |
| 12 | Calificación de encabezado | Indicador de calidad de cabeceo y cabeceo RTK del receptor: 0 = corrección no disponible o no válida 1 = posicionamiento de un solo punto 2 = flotación RTK 3 = solución de ambigüedad fija RTK | x | 3 |
| 13 | #SsolnSVs | Número de satélites que se anticipan en el cálculo de la estación esclava | x | 40 |
| 14 | #MsolnSVs | Número de satélites que se anticipan en el cálculo de la estación maestra | x | 35 |
| 15 | Pos Este | Coordenadas de la posición este: la posición este en el sistema de coordenadas geográficas con la estación base como origen, mantenga 3 dígitos significativos después del punto decimal | xxx.xxx | |
| 16 | Pos norte | Coordenadas de la posición norte: la posición norte en el sistema de coordenadas geográficas con la estación base como origen, mantiene 3 dígitos significativos después del punto decimal | xxx.xxx | |
| 17 | Pos up | Coordenadas de posición cenital: la posición cenital en el sistema de coordenadas geográficas con la estación base como origen, mantiene 3 dígitos significativos después del punto decimal | xxx.xxx | |
| 18 | Vel este | Velocidad de abscisidad: velocidad de abscisa en el sistema de coordenadas geográficas, mantenga 3 dígitos significativos después del punto decimal | xxx.xxx | 0.001 |
| 19 | Vel norte | Velocidad de ordenación: Velocidad de ordenada en el sistema de coordenadas geográficas, mantenga 3 dígitos significativos después del punto decimal Unidad: km/h (vacío si no está disponible) | xxx.xxx | 0.001 |
| 20 | Vel norte | Velocidad cenital: la velocidad cenital en el sistema de coordenadas geográficas, mantenga 3 dígitos significativos después del punto decimal Unidad: km/h (vacío si no está disponible) | xxx.xxx | 0.007 |
| 21 | M SNR | El valor actual de la relación portadora/ruido de la antena maestra | 95~100: Excelente 90~94: Bueno 85~89: Moderado 80~84: Justo <80: Pobre | Métricas de calidad de datos para la antena maestra |
| 22 | Con el SNR | El valor actual de la relación portadora/ruido de la antena esclava | 95~100: Excelente 90~94: Bueno 85~89: Moderado 80~84: Justo <80: Pobre | Métricas de calidad de datos para la antena esclava |
| 23 | *Xx | Suma de comprobación XOR (cadena hexadecimal, calculada a partir del encabezado del fotograma) | *Hh | *12 |
| 24 | [CR] [LF] | Terminador de oraciones | - | [CR] [LF] |
Acerca de la tecnología ComNav
ComNav Technology desarrolla y fabrica placas y receptores GNSS OEM para aplicaciones de posicionamiento de alta precisión. Su tecnología ya se ha utilizado en una amplia gama de aplicaciones, como topografía, construcción, control de máquinas, agricultura, transporte inteligente, sincronización precisa, monitoreo de deformaciones, sistemas no tripulados. Con un equipo dedicado a la tecnología GNSS, ComNav Technology está haciendo todo lo posible para suministrar productos confiables y competitivos a clientes de todo el mundo. ComNav Technology cotiza en la Bolsa de Valores de Shanghái (Junta de Ciencia y Tecnología), valores: ComNav Technology (Compass Navigation), código bursátil: 688592.
Acerca de SinoGNSS®
SinoGNSS® es la marca comercial oficial de ComNav Technology Ltd., registrada en la República Popular China, la UE, EE. UU. y Canadá. Todas las demás marcas comerciales son propiedad de sus respectivos dueños.