La magia detrás de RTK: ofrecer una precisión de posicionamiento sin precedentes

 1 Entendiendo RTK (cinemática en tiempo real)
1 Entendiendo RTK (cinemática en tiempo real)
RTK, o cinemática en tiempo real, es una técnica de navegación por satélite diseñada fundamentalmente para mejorar la precisión de los datos de posición obtenidos de los sistemas de posicionamiento basados en satélites como GPS, GLONASS, Galileo y BeiDou.
Imagina que estás en un vasto campo abierto, tratando de determinar tu posición usando un GPS convencional. Por lo general, es posible que obtenga precisión dentro de unos pocos metros. Ahora, introduce RTK en la escena y, de repente, ¡estás señalando tu ubicación con una increíble precisión centimétrica! Este salto en precisión se logra gracias a la capacidad única de RTK para corregir las señales GPS, lo que lo diferencia de otros métodos de posicionamiento.
2 RTK vs. PPK: ¿Cuál es la diferencia?
Mientras te sumerges en el mundo de la navegación por satélite de alta precisión, seguro que te encuentras con PPK o cinemática postprocesada. A primera vista, RTK y PPK pueden parecer hermanos gemelos, pero tienen claras diferencias operativas.
La distinción más significativa radica en el momento de la corrección de los datos:
Por lo tanto, a la hora de decidir entre RTK y PPK, todo se reduce a si necesita una precisión inmediata sobre la marcha (RTK) o si está de acuerdo con recopilar datos primero y lograr precisión después (PPK).
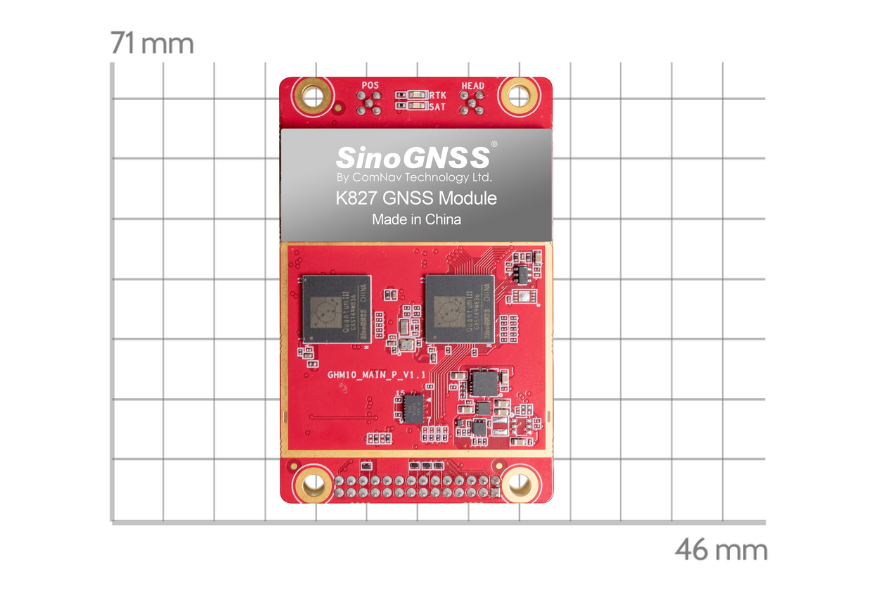
3 Configuración de RTKPara sacar el máximo partido a la tecnología RTK, es imprescindible una configuración correcta. La prueba se realizó utilizando un módulo de la serie K8. Estos son los pasos de configuración recomendados basados en RTCM3.0/3.2, el formato de mensaje estandarizado para la corrección diferencial:
Radio Base station--RTCM3.2 MSM4
Here shows commands of RTCM with different format, including RTCM3.0, RTCM3.2 MSM4, RTCM3.2 MSM5.
If use radio modem for data link communication between Base and Rover, as considering limited data size can be sent per second, there suggest use subcontracting strategy for base transmit different constellations.
| RTCM3.0 | For the Base |
|---|---|
| Unlogall | // Clear previous settings |
| Fix position 31.1744880 121.3878091 44.1287 | // Fix the coordinate B, L, H |
| (Fix auto) | // Fix auto |
| Log comX rtcm1004b ontime 1 | // Extended L1, L2 GPS RTK Observables |
| Log comX rtcm1012b ontime 1 | // Extended L1, L2 GLONASS RTK Observables |
| Log comX rtcm1005b ontime 5 | // Base station coordinate |
| Log comX rtcm1033b ontime 10 | // Base station type |
| Saveconfig | // Save configuration |
| RTCM3.2 (MSM4) | For the Base |
|---|---|
| Unlogall | // Clear previous settings |
| Fix position 31.1744880 121.3878091 44.1287 | // Fix the entered coordinate |
| (Arreglar automático) | Fijar la coordenada automáticamente |
| Registro comX rtcm1074b a tiempo 1 | GPS PR completos y rangos de fase más CNR |
| Registro comX rtcm1084b a tiempo 1 | GLONASS PRs completos y rangos de fase más CNR |
| Registro comX rtcm1094b a tiempo 1 | PRs completos de GALILEO y rangos de fase más CNR |
| Registro comX rtcm1124b a tiempo 1 | BeiDou PRs completos y rangos de fase más CNR |
| Registro comX rtcm1005b a tiempo 5 | Coordenada de la estación base |
| Registro comX rtcm1033b a tiempo 10 | Tipo de estación base |
| Saveconfig | Guardar configuración |
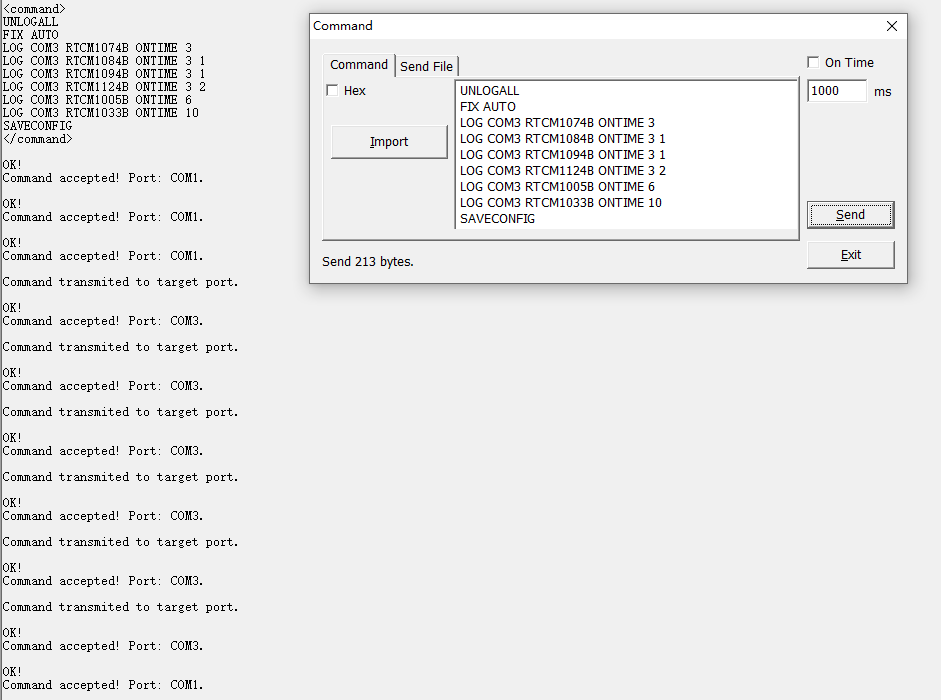
| RTCM3.2 (MSM4)(radio) | Para la base |
|---|---|
| Desloguear | Igual que el anterior |
| Posición fija 31.1744880 121.3878091 44.1287 | |
| (Arreglar automático) | |
| Registro comX rtcm1074b a tiempo 3 | |
| Log comX rtcm1084b ontime 3 1 | |
| Log comX rtcm1094b ontime 3 1 | |
| Log comX rtcm1124b ontime 3 2 | |
| Log comX rtcm1005b ontime 6 | |
| Registro comX rtcm1033b a tiempo 10 | |
| Saveconfig |
| RTCM3.2 (MSM5) | Para la base |
|---|---|
| Desloguear | Igual que el anterior |
| Posición fija 31.1744880 121.3878091 44.1287 | |
| (Arreglar automático) | |
| Log comX rtcm1075b ontime 1 | |
| Log comX rtcm1085b ontime 1 | |
| Registro comX rtcm1095b a tiempo 1 | |
| Registro comX rtcm1125b a tiempo 1 | |
| Registro comX rtcm1005b a tiempo 5 | |
| Registro comX rtcm1033b a tiempo 10 | |
| Saveconfig |
| RTCM3.2 (MSM5)(radio) | Para la base |
|---|---|
| Desloguear | Igual que el anterior |
| Posición fija 31.1744880 121.3878091 44.1287 | |
| (Arreglar automático) | |
| Registro comX rtcm1074b a tiempo 3 | |
| Log comX rtcm1084b ontime 3 1 | |
| Log comX rtcm1094b ontime 3 1 | |
| Log comX rtcm1124b ontime 3 2 | |
| Log comX rtcm1005b ontime 6 | |
| Registro comX rtcm1033b a tiempo 10 | |
| Saveconfig |
| Para el Rover | |
|---|---|
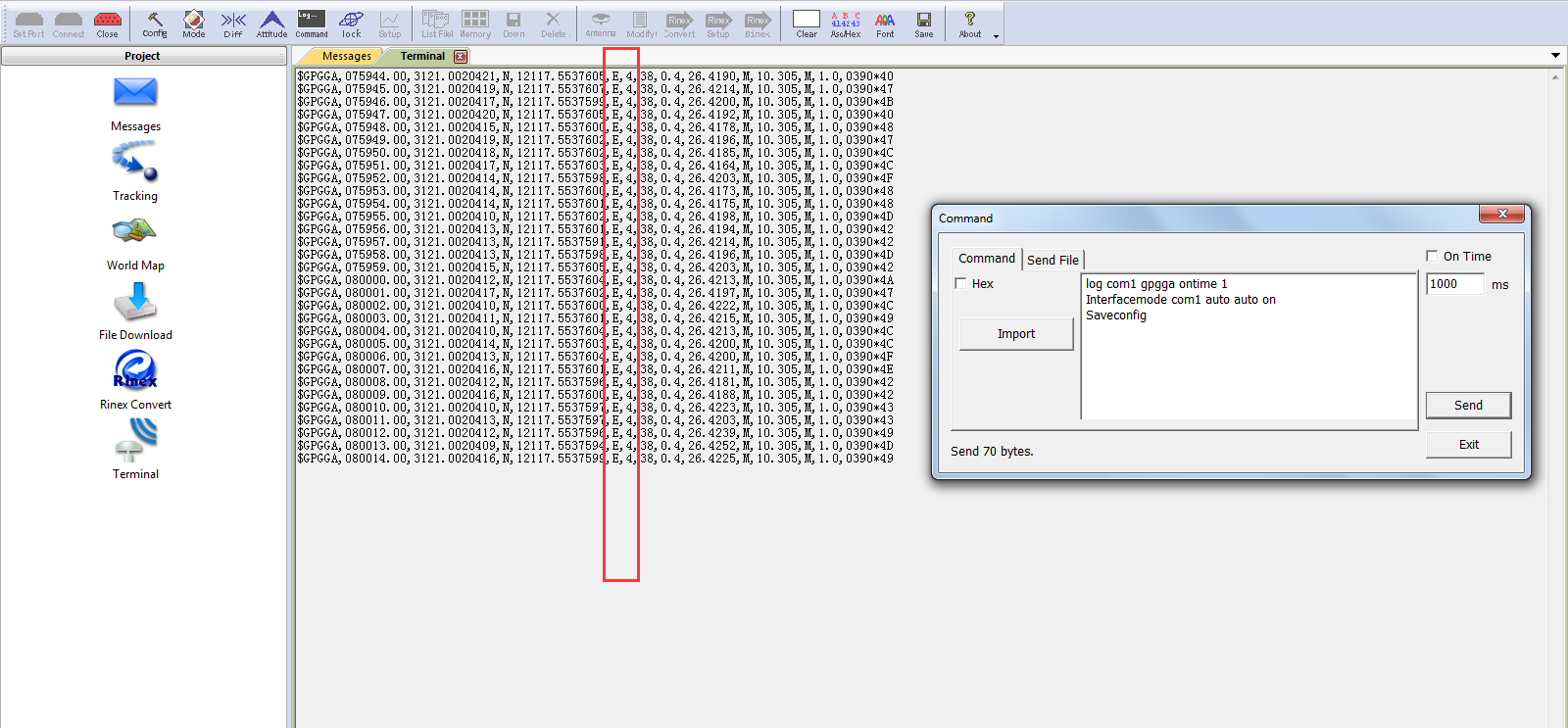
| log comX gpgga ontime 1 | Datos GPGGA de salida de ComX |
| Interfacemode comX auto auto on | Config comX para detectar correcciones RTCM |
| Saveconfig | Guardar configuración |
Consejo: Si comX es el puerto serie utilizado para la configuración actualmente, reemplace el comando saveconfig con interfacemode saveconfig.
Una vez que la configuración se haya realizado correctamente, puede comprobar el modo de la placa OEM con el mensaje '$GPGGA'. Si está en modo RTK, el estado de la solución debe mostrarse como "E,4". $GPGGA,015101.00,3121. 0000551, N, 12117.5483125, E, 4, 23, 1.1, 37.2598, M, 0.000, M, 02,0004 * 58
Rover-RTK fijo
Además, la configuración predeterminada es el modo de encuesta, y deberá ajustar para corregir el modo dinámico de acuerdo con sus aplicaciones. Por ejemplo, el dispositivo utilizado para la topografía de tierras, puede usar el modo predeterminado "encuesta", si el dispositivo se usa en el robot, deberá configurar el modo en "robot". En diferentes modos, el motor RTK trata los datos de observación en un estilo diferente para promover el rendimiento del motor RTK. El comando es el siguiente:
| SET APPSCENE <mode> | Encuesta/Robot/Coche/Aire/Espacio |
| Saveconfig | Guardar configuración |
4 ConclusiónAcerca de la tecnología ComNav
ComNav Technology desarrolla y fabrica placas y receptores GNSS OEM para aplicaciones de posicionamiento de alta precisión. Su tecnología ya se ha utilizado en una amplia gama de aplicaciones, como topografía, construcción, control de máquinas, agricultura, transporte inteligente, sincronización precisa, monitoreo de deformaciones, sistemas no tripulados. Con un equipo dedicado a la tecnología GNSS, ComNav Technology está haciendo todo lo posible para suministrar productos confiables y competitivos a clientes de todo el mundo. ComNav Technology cotiza en la Bolsa de Valores de Shanghái (Junta de Ciencia y Tecnología), valores: ComNav Technology (Compass Navigation), código bursátil: 688592.
Acerca de SinoGNSS®
SinoGNSS® es la marca comercial oficial de ComNav Technology Ltd., registrada en la República Popular China, la UE, EE. UU. y Canadá. Todas las demás marcas comerciales son propiedad de sus respectivos dueños.