Introducción al comando: "log sysconfig"
"¿Hay alguna forma de ver la configuración actual de mi módulo?" Conocimos a muchos clientes que sienten curiosidad por la configuración actual de la placa OEM SinoGNSS K8, en el artículo de hoy, presentaremos la información más utilizada sobre la configuración del sistema. Mediante el comando "log sysconfig", los clientes pueden verificar la configuración básica, la configuración rtk y el modo de trabajo como PPS, Event y SBAS.
Este comando es adecuado para la mayoría de los módulos GNSS de la serie K8, para obtener más información, visite el sitio web: https://www.comnavtech.com/Products/12.html
Aquí se muestra con el software ComNav CRU, para dar el comando "log sysconfig" y sus mensajes de salida.
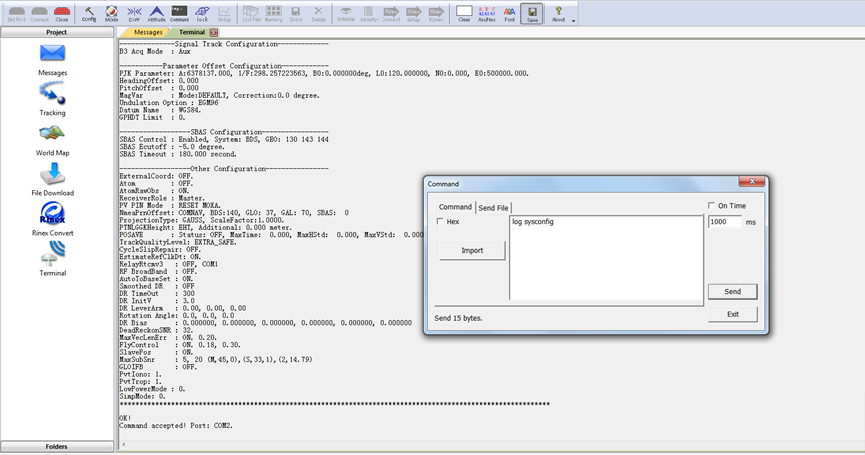
Registro de Sysconfig
 1 Configuración básica
1 Configuración básica
En la configuración básica, muestra la configuración de la velocidad de cálculo, el ángulo de corte de los satélites, los satélites bloqueados y alguna otra información.

● Frecuencia de la CPU
En algunos casos, se necesita una observación de alta tasa de actualización, PVT o RTK, la frecuencia predeterminada del núcleo de la CPU no podría soportar una carga de cálculo tan grande, por lo que es necesaria una alta frecuencia, al mismo tiempo, significa más costo de energía.
● Frecuencia PVT/PPP/RTK
El mensaje se refiere a la tasa de cálculo PVT/PPP/RTK.
En la placa de la serie K8, la configuración predeterminada es de 5 HZ, si se necesita una frecuencia de actualización PVT más alta o más baja, este comando podría configurar la velocidad de actualización PVT como máximo 20 Hz.
| SET PVTFREQ Param1 | Param1 es una frecuencia PVT válida en Hz: 1, 2, 5 (predeterminado), 10, 20 |
| SET RTKFREQ Param1 | Param1 es una frecuencia RTK válida en Hz: 1, 2, 5 (predeterminado), 10, 20 |
Aviso: La frecuencia PVT debe ser mayor que la frecuencia RTK.
● Ángulo de corte GPS / BD2 / GLO / GAL
Este mensaje establece el ángulo de corte de elevación para el rastreo. La placa no comienza a buscar automáticamente un satélite hasta que se eleva por encima del ángulo de corte. Los satélites rastreados que caen por debajo del ángulo de corte ya no se rastrean a menos que se hayan asignado manualmente.
ECUTOFF 10 | el valor del ángulo de corte (-90 ~ 90 grados) |
● SV bloqueados
Prevent the board from using a satellite system. This message prevents the receiver from using satellites in the specified system in the solution computation.
| LOCKOUTSYSTEM [Param1] | [Param1]: GPS,GLAONASS,GALILEO,BD3,BD2,QZSS |
● CP Smooth PR
A method of combination of CP and PR, to get a higher quality observation.
| SET CPSMOOTHPR [Param1] [Param2] [Param3] | Param1: smooth enable switch, ON/OFF Param2: smooth time constant, range from 10 ~ 200 seconds, default is 50s; Param3: tracking time threshold, range from 0 ~ 60 seconds, default is 15s. |
● Smoothed PVT
In single-point positioning, ComNav Technology have adopted an advanced smoothing filter to enhance pass to-pass accuracy, which need send commands as:
| Set smoothedpvt on | Enable smooth mode |
| Saveconfig | Save configuration |
● INS Control
The INS (Inertial Navigation System) Mode allows OEM modules to continuously output positioning information through IMU in a short time when losing satellites signal.
ENABLE: INS enabled; DISABLE: INS disabled
1/2/3/4/5/6/7/8: IMU axes type
Regarding IMU setup, you can refer to blog “ How to Enable GNSS+INS system on K8 series modules” by link: https://www.comnavtech.com/blogs_details/3.html
● CWI1/CWI2
K8 OEM modules support two channels to active anti-interference, it refers to CWI1 and CWI2. Clients can enable CWI by auto mode, or manually select the channels. Details can refer to ComNav OEM commands list: CNT-OEM-RM001_Rev_2.3_20220507
| SET CWI AUTO Param1 | Param1: 0: off, default 1: channel 1 on 2: channel 2 on 3: channel 1&2 on |
| SET CWI MANUAL Param1 Param2 Param3 | Param1: 1/2/3/4/5/6/7/8/9/10 Param2: 0/1 Param3: 0/1 |
2 RTK configuration
This part is the receiver's processing scheme for RTK, and the current working status information.

● RTK Time Out
This command is used to set the maximum age of RTK data to use when operating as a rover station. RTK data received that is older than the specified time is ignore.
After rtk disconnects the differential, after 200 seconds, it will exit fixed status.
| RTKTIMEOUT [time-delay] | time-delay: less than 200s, default 200s |
● RTKFIXHOLDTIME
This command is used to set the maximum age of RTK fixed data to use when operating as a rover station. RTK fixed data received that is older than the specified time is ignored.
| RTKFIXHOLDTIME [time-delay] | time-delay: less than 200s and more than 5s, default value is 20s |
● RtkSourceType
This command is used to identify from which base station to accept RTK differential corrections. This is useful when the receiver is receiving corrections from multiple base stations.
| RTKSOURCE <type> [stn id] | type: AUTO/RTCMV3 stn id: --AUTO: ANY --RTCMV3: 0 <= RTCMV3 station ID <=4095 or ANY |
● RtkRefStnType
This command sets the station ID value for the receiver when it is transmitting corrections. This allows for the easy identification of which base station was the source of the data.
| DGPSTXID <type> <ID> | type: AUTO/RTCMV3 stn id: --AUTO: ANY --RTCMV3: 0 <= RTCMV3 station ID <=4095 or ANY |
● App Scene
This command can be used to set the application mode. In different modes, the RTK engine should process different styles of observation data to improve the performance of the RTK engine.
For example, if you use ComNav K8 series as drone gps module, there will setup APP Scene mode to air.
| SET APPSCENE <mode> | Mode: survey/robot/car/air/space |
| Saveconfig | Guardar configuración |
Se sugieren otras opciones para mantener como predeterminadas.
3 Configuración COM
Este mensaje muestra el estado (modo normal o modo diferencial) de todos los puertos COM.

Para obtener más detalles, consulte el blog:
https://www.comnavtech.com/blogs_details/8.html
4 Configuración de PPS
PPS, que significa "pulso por segundo", es una señal de tiempo precisa que se usa a menudo en diversas aplicaciones que requieren una sincronización de tiempo precisa.

Con la función PPS, puede configurar la polaridad, el período y el ancho de pulso de la salida PPS.
Formato: PPSCONTROL <interruptor> <polaridad> <período> <ancho de pulso>
| PPScontrol Habilitar positivo 1 1000 | Establecer PPS como pulso de alto nivel con un ancho de 1 ms por segundo |
| Saveconfig | Guardar configuración |
● <Switch> admite "Habilitar" o "Deshabilitar", tenga en cuenta que "Deshabilitar" no es válido.
● <polaridad> admite "positivo" y "negativo", "positivo" significa modo de pulso de alto nivel y "negativo" significa modo de pulso de bajo nivel.
● <período> en segundos, la frecuencia de actualización puede ser de hasta 10 Hz.
● <ancho de pulso> en microsegundos, el ancho de pulso debe ser inferior a la mitad del período.
5 Configuración de EVENTOS
Evento se refiere a una ocurrencia, acción o incidente significativo que desencadena una respuesta o un cambio en el estado del sistema. Los eventos pueden ser tanto planificados como espontáneos, y a menudo se utilizan para capturar y gestionar momentos importantes dentro de un sistema.

Formato: MARKCONTROL <señal > <interruptor> [polaridad] [sesgo de tiempo] [guardia de tiempo]]
| markcontrol mark1 enable negative 0 0 | Abrir marcador Evento1 |
| Onyu en log marktime | Hora del evento de entrada de marca |
| Registro markposa onnew | Posición en el momento del evento de entrada de marca |
| Saveconfig | Guardar configuración |
● <signal> admite las palabras clave "mark1" y "mark2".
● <interruptor> admite las palabras clave "habilitar" y "deshabilitar".
● [Polaridad] admite las palabras clave "positivo" y "negativo", que representan por separado "pulso positivo" y "pulso negativo".
● [sesgo de tiempo] Se puede aplicar un sesgo de tiempo constante en nanosegundos a cada pulso de evento. Normalmente, esto se utiliza para tener en cuenta un retraso en la transmisión.
●
[cronometrador] El protector de tiempo especifica el número mínimo de milisegundos entre pulsos. Esto se utiliza para filtrar de forma gruesa los pulsos de entrada.
6 Configuración PVT
Para la configuración de PVT, los parámetros normalmente utilizados para la depuración de investigación y desarrollo.

7 Configuración del desplazamiento de parámetros
En esta sección, proporciona parámetros para el datum y algún valor de desplazamiento.

● Parámetro PJK: A: 6378137.000, 1 / F: 298.257223563, B0: 0.0000000deg, L0: 120.000000, N0: 0.000, E0: 500000.000.
| SET PJKPARA Param1... Param6 | Param1... Parámetro 6: 1) A: el eje largo de la tierra 2) 1 / F: F es la tarifa plana de la Tierra 3) B0: latitud de referencia (en grados) 4) L0: longitud de referencia (en grados) 5)N0: coordenada norte de referencia 6)E0: coordenada este de referencia |
● Desplazamiento de encabezado
Este comando se utiliza para agregar un desplazamiento en grados en los valores de rumbo y tono de los registros HEADING, GPHDT, GPNAV, GPTRA, GPYBM y PTNL,AVR.
Tanto el desplazamiento de rumbo como el desplazamiento de cabeceo tienen los valores predeterminados de 0 grados.
HEADINGOFFSET<headingoffsetindeg><pitchoffsetindeg> | Valor de desplazamiento de rumbo, oscila entre -180.0 ~ + 180.0 °; Valor de desplazamiento de tono, oscila entre -90.0 ~ + 90.0 °. |
8 Configuración de SBAS
Todas las series SinoGNSS K8 son compatibles con la función SBAS, consulte el blog "¿Cómo comenzar con el modo SBAS?" en el enlace: https://www.comnavtech.com/blogs_details/1.html

9 Otra configuración

● IMU (INS)
DR suavizado: OFF // Tiempo de espera de DR de suavizado de INS : 300 // Tiempo de espera de INS
DR InitV: 3.0 // Velocidad de inicialización de la navegación inercial
DR LeverArm: 0.00, 0.00, 0.00 // Valor del brazo INS
Con respecto a la configuración de IMU, puede consultar el blog "Cómo habilitar el sistema GNSS + INS en los módulos de la serie K8" en el enlace: https://www.comnavtech.com/blogs_details/3.html
● APP
Fuente PPP: B2b //B2b/HAS/RTCM conmutable
PPP CoordSys: ITRF //ITRF/WGS84 conmutable
Póngase en contacto con ComNav para obtener la última versión de firmware PPP-HAS/B2b.
Los parámetros que no se mencionan explícitamente se consideran reservados o no se permite su divulgación al público.
Acerca de la tecnología ComNav
ComNav Technology desarrolla y fabrica placas y receptores GNSS OEM para aplicaciones de posicionamiento de alta precisión. Su tecnología ya se ha utilizado en una amplia gama de aplicaciones, como topografía, construcción, control de máquinas, agricultura, transporte inteligente, sincronización precisa, monitoreo de deformaciones, sistemas no tripulados. Con un equipo dedicado a la tecnología GNSS, ComNav Technology está haciendo todo lo posible para suministrar productos confiables y competitivos a clientes de todo el mundo. ComNav Technology cotiza en la Bolsa de Valores de Shanghái (Junta de Ciencia y Tecnología), valores: ComNav Technology (Compass Navigation), código bursátil: 688592.
Acerca de SinoGNSS®
SinoGNSS® es la marca comercial oficial de ComNav Technology Ltd., registrada en la República Popular China, la UE, EE. UU. y Canadá. Todas las demás marcas comerciales son propiedad de sus respectivos dueños.