
Cómo habilitar el sistema GNSS + INS en los módulos de la serie K8
GNSS (Sistema Global de Navegación por Satélite) es un sistema de posicionamiento basado en satélites que proporciona información de ubicación y tiempo en cualquier lugar de la superficie de la Tierra o cerca de ella. Algunos ejemplos de GNSS son GPS, GLONASS, Galileo y BeiDou.
El INS (Sistema de Navegación Inercial), por otro lado, es un sistema de navegación autónomo que utiliza acelerómetros y giroscopios para rastrear el movimiento de un objeto. Al medir los cambios en la velocidad y la dirección, el INS puede calcular la posición y trayectoria actuales de un objeto. El INS es particularmente útil en áreas donde las señales GNSS son débiles o no están disponibles, como bajo tierra o bajo el agua.
En muchos casos, GNSS e INS se utilizan juntos para proporcionar una solución de navegación más precisa y fiable. Esto se conoce como navegación integrada o integración GNSS/INS. La serie ComNav K8 combina las fortalezas de ambos sistemas, la navegación integrada puede ser robusta en entornos desafiantes y proporciona un posicionamiento continuo incluso durante breves interrupciones de GNSS, aquí hay algunos ejemplos del rendimiento de K8 GNSS + INS en diferentes entornos.
Verde: solo GNSS Rojo: GNSS+INS
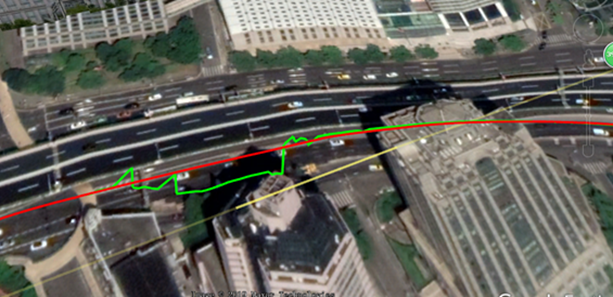
Debajo del paso elevado

A través de la estación de metro

En el garaje
 Instalación y configuración
Instalación y configuración
1) Installation
Install the board on the vehicle as rigidly as possible to ensure that the board and the vehicle will not move relative to each other during driving. The device also needs to be installed in a location that minimizes the impact of vibration and electromagnetic interference.
2) Setup INS mode
After installation, you can active the INS option as commands
Inscontrol enable set smootheddr on saveconfig | //activate INS mode //activate the INS smooth mode // Save configuration |
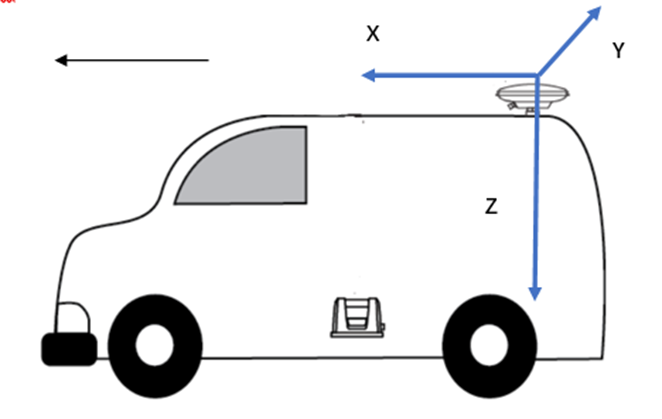
It is recommended that the Y-axis marked on the module be kept on the same straight line as the direction of the carrier body, that is, Y-axis points to the forward direction of the vehicle. For different direction of installation, you can refer to below chart to setup the imuaxestype with command below.
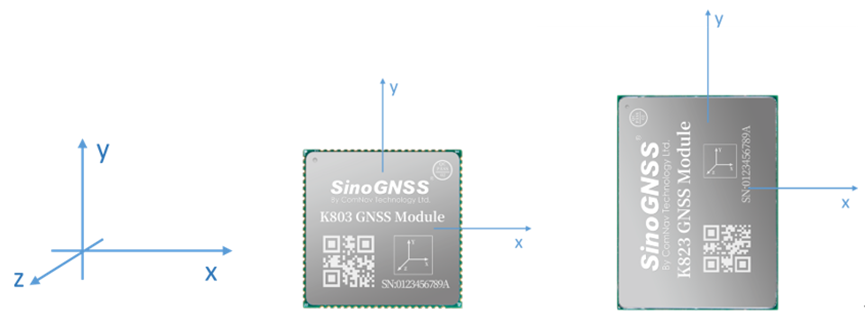
INS coordinate system
set imuaxestype <axestype> saveconfig | //Set axes of OEM module // Save configuration |
Axestype | Description |
1 | The front of the OEM module faces up, the y-axis faces the front of the vehicle. |
2 | Axes 1 rotates 90 degrees counterclockwise horizontally. |
3 | Axes 1 rotates 180 degrees counterclockwise horizontally. |
4 | Axes 1 rotates 270 degrees counterclockwise horizontally. |
5 | The front of the K8 module faces down, the y-axis faces the front of the vehicle. |
6 | Axes 5 rotates 90 degrees counterclockwise horizontally. |
7 | Axes 5 rotates 180 degrees counterclockwise horizontally. |
8 | Axes 5 rotates 270 degrees counterclockwise horizontally. |
3) Setup Drleverarm value
Drleverarm value: the three-axis vector from the antenna phase center to the INS phase center.
set drleverarm X Y Z saveconfig | //set arm value (-20m~+20m) // Save configuration |
Note: The XYZ is not related to the axis of INS. X points to the front of the vehicle, Y points to the right of the vehicle, and Z points downward.
4) Save INS configuration
Once change the above INS configuration, it will need “reset” to board to save the INS configuration.
INS Initialization
The inertial navigation system (INS) calculates the navigation result by integrating the measurement value of the inertial sensor, that is, each iteration of the navigation equation needs to use the previous navigation parameters such as position, velocity, and attitude as its initial value. Therefore, before using INS to provide navigation results, it must be initialized.
Method: After enable INS, there will need firstly get correction input to get RTK fixed solution, and then drive the vehicle to an open environment, and make sure the speed reaches the initialization threshold, and drive about 10m to complete the initialization.
INS Calibration
In order to ensure the performance of INS, it needs to be calibrated after the initialization is completed to eliminate the placement error of the INS equipment.
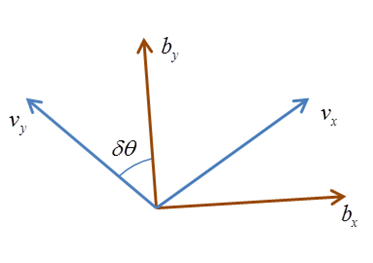
Method: Keep a speed of 5m/s in an open environment and drive in a straight line for at least 200m, turn 90° for left and right twice for each (with a good road environment, you can turn around in a figure 8).
The status of calibration can be checked by message “sysrts”. After calibrated, the status of INS will be “3”.
Log sysrts | //check INS status |
Here is an sample output of SYSRTS message:
$SYSRTS,466724.10,093826.10,48,5,,AT,41,78,1,1,49,,,,,,,,,M,AIR,0,,42.5,3,9,2200,0,0*3A
There are totally 4 different types of status for INS, as the below table lists:
INS status | INS enabled | INS initialized | INS Calibrated |
0 | û | ||
1 | ü | ||
2 | ü | ü | |
3 | ü | ü | ü |
Positioning and heading message
Request positioning and heading message with GPGGA message and GPTRA message.
log gpgga ontime 0.2 log gptra ontime 0.2 | //positioning message //heading message |
In GPGGA message, the solution status for GNSS+INS is “6”; In GPTRA message, the solution status for GNSS+INS is “6”.
Example of GPGGA message
$GPGGA,024941.00,3110.4693903,N,12123.2621695,E,6,16,0.6,57.0924,M,0.000,M,99,AAAA*55
Field# | Structure | Description | Symbol | Example |
1 | $GPGGA | Log header | $GPGGA | |
2 | utc | UTC time of position (hours/minutes/seconds/ decimal seconds) | hhmmss.ss | 202134.00 |
3 | lat | Latitude (DDmm.mm) | llll.lllllll | 3110.4693903 |
4 | latdir | Latitude direction (N = North, S = South) | a | N |
5 | lon | Longitude (DDDmm.mm) | yyyyy.yyyyyyy | 121232621695 |
6 | londir | Longitude direction (E = East, W = West) | a | W |
7 | GPS qual | GPS Quality indicator 0 = fix not available or invalid 1 = GPS fix 2 = SBAS, C/A differential GPS, OmniSTAR HP, OmniSTAR XP, OmniSTAR VBS, or CDGPS 4 = RTK fixed ambiguity solution (RT2) 5 = RTK floating ambiguity solution (RT20), OmniSTAR HP or OmniSTAR XP 6 = Modo de estimación (GNSS+INS) 7 = Modo de entrada manual (posición fija) 15 = PPP | x | 1 |
Ejemplo de mensaje GPTRA
$GPTRA,063027.30,101.78,071.19,-00.00,6,10,0.00,0004*51
Campo# | Estructura | Descripción | Símbolo | Ejemplo |
1 | $GPTRA | Encabezado de registro | $GPTRA | |
2 | Utc | UTC de posición | hhmmss.ss | 063027.30 |
3 | encabezado | 0 ~ 360 grados | hhh.hh | 101.78 |
4 | alquitrán | -90 ~ 90 grados | ppp.pp | 071.19 |
5 | rodar | [Reservado] | rrr.rr | -00.00 |
6 | Estado de sol | Indicador de solución 0 = corrección no disponible o no válida 1 = Posición de un solo punto 2 = SBAS, GPS diferencial C/A, OmniSTAR HP, OmniSTAR XP, OmniSTAR VBS o CDGPS 4 = Solución de ambigüedad fija RTK (RT2) 5 = Solución de ambigüedad flotante RTK (RT20), OmniSTAR HP u OmniSTAR XP 6 = Modo de estimación (GNSS+INS) | Yo | 4 |
Acerca de la tecnología ComNav
ComNav Technology desarrolla y fabrica placas y receptores GNSS OEM para aplicaciones de posicionamiento de alta precisión. Su tecnología ya se ha utilizado en una amplia gama de aplicaciones, como topografía, construcción, control de máquinas, agricultura, transporte inteligente, sincronización precisa, monitoreo de deformaciones, sistemas no tripulados. Con un equipo dedicado a la tecnología GNSS, ComNav Technology está haciendo todo lo posible para suministrar productos confiables y competitivos a clientes de todo el mundo. ComNav Technology cotiza en la Bolsa de Valores de Shanghái (Junta de Ciencia y Tecnología), valores: ComNav Technology (Compass Navigation), código bursátil: 688592.
Acerca de SinoGNSS®
SinoGNSS® es la marca comercial oficial de ComNav Technology Ltd., registrada en la República Popular China, la UE, EE. UU. y Canadá. Todas las demás marcas comerciales son propiedad de sus respectivos dueños.