
Principio VRS y rendimiento de CDC.NET+CORS
 1 Breve introducción a los principios de CORS, RTK de red y VRS
1 Breve introducción a los principios de CORS, RTK de red y VRS
CORS, también conocida como Estaciones de Referencia de Operación Continua, es una o varias estaciones de referencia GNSS fijas y de operación continua, con la combinación de computadoras, comunicaciones de datos e Internet (LAN/WAN) para proporcionar automáticamente múltiples necesidades de los usuarios con diferentes tipos de observaciones GNSS (fase portadora, pseudorango), varias correcciones, estado y otros sistemas de servicio GNSS en tiempo real.
La RTK de la red GNSS, también conocida como RTK de estación de referencia múltiple, es un método de posicionamiento que establece múltiples (generalmente tres o más) estaciones de referencia GNSS en un área para formar una cobertura de malla, y calcula y transmite la información de corrección GNSS basada en una o más de estas estaciones de referencia y realiza correcciones en tiempo real a los usuarios GNSS en esta área.
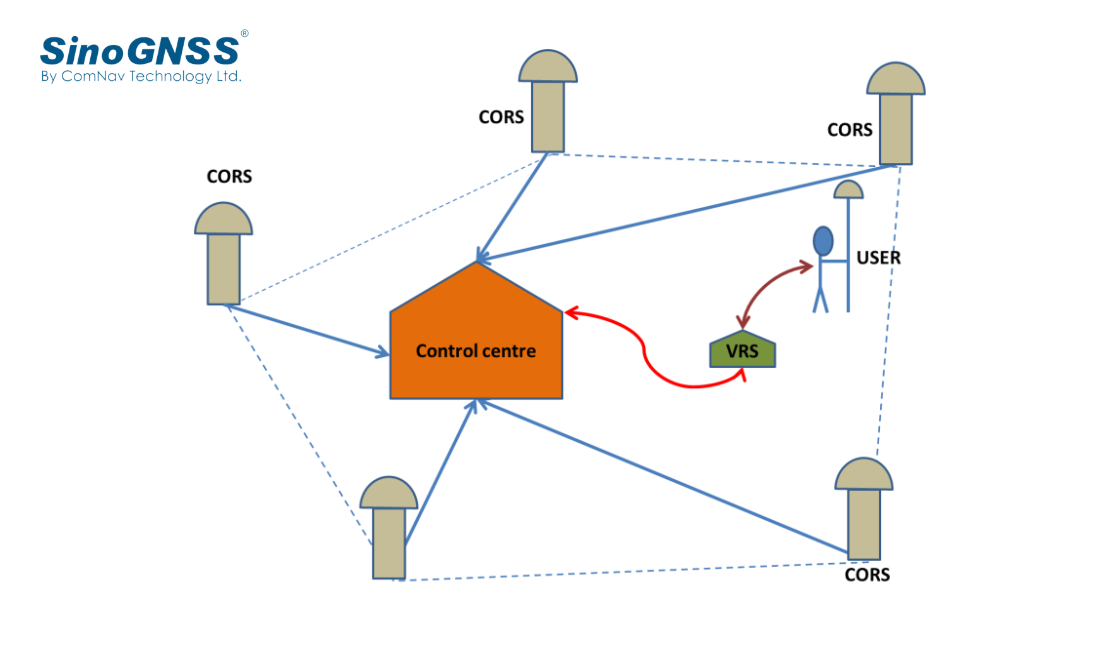
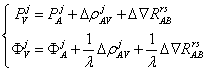
Estación Virtual de Referencia. Se refiere a un cierto número (al menos tres) de estaciones de referencia que se instalan en un área para recibir señales satelitales y transmitir la información al centro de procesamiento de información. El rover envía la información de ubicación del receptor al centro de procesamiento de datos, y el centro de procesamiento de datos seleccionará la información de varias estaciones de referencia cercanas para crear "virtualmente" una estación de referencia basada en la ubicación de la estación móvil, luego transmitirá los datos corregidos de la estación de referencia virtual a la estación móvil. La posición de esta estación de referencia virtual suele estar a menos de 5 kilómetros alrededor de la estación móvil, pero en realidad, suele estar a unos pocos metros. El error de los datos obtenidos a través de esta tecnología se reduce considerablemente.
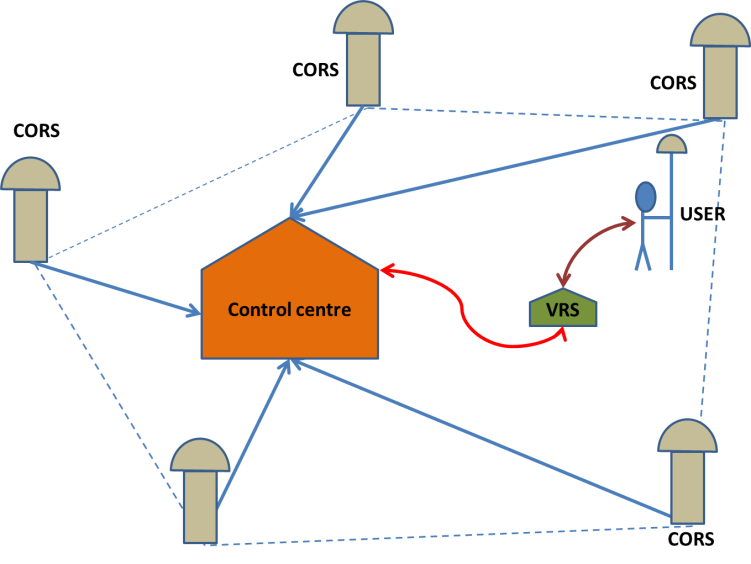
Figura 1. Diagrama esquemático del principio de funcionamiento de VRS
2 Comparación y análisis de varias tecnologías RTK de red
VRS | FKP | MAC | CBI | |
Modelo matemático básico | Modelo de interpolación del modelo de observación de doble diferencia | Modelo de Observación de Filtrado de Kalman de la Solución Global de Toda la Red | Modelo de observación de doble diferencia / modelo compatible | Modelo de interpolación del modelo de observación de doble diferencia |
Spatial error model | On the server side | On the mobile user side | On the mobile user side | On the server side |
Reference station participating in the calculation | Need to select a master reference station, and all reference stations in the network participate in the positioning calculation | Do not select the main reference station, take the three closest reference stations to the rover | Need to select a master station, but it is not required to use the base station closest to the user as the master station | Flexible selection of the reference station according to the relative position of the rover and the reference station |
Communication mode | Two-way communication | One-way communication | Two-way and one-way communication | One-way communication |
GPSNet of Trimble | SAPOS network of Germany | Spider of Leica | PowerNet of Wuhan University |
3 VRS Fundamental
The first is the fixation of the long baseline ambiguity of the base station. How to achieve fast and accurate fixation of the long baseline ambiguity is a key factor that affects the initialization time and availability of the system.
The second is the accurate modeling of regional spatial atmospheric errors. The modeling accuracy of atmospheric errors directly affects the positioning accuracy of users.
Real-time transmission, encoding and decoding of data in different formats
Data quality control, processing of related errors such as cycle slip, clock slip, and multipath;
Concurrent processing when large-capacity users access;
1) Fixing the ambiguity of the baseline
a) Wide lane ambiguity

b) Deionospheric combination

c) L1 ambiguity and zenith tropospheric delay RZTD (tropospheric effect is negligible for short baselines and does not need to be estimated, but needs to be estimated for long baselines)

2) Calculation of baseline atmospheric error delay
a) Calculation of double-difference ionospheric delay


b) Calculation of double-difference tropospheric delay

3) Linear interpolation of tropospheric and ionospheric delays at virtual reference stations
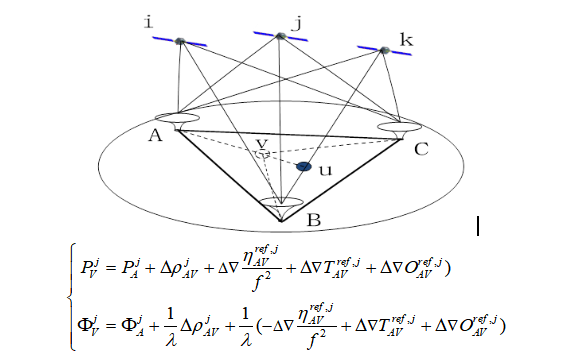
4) Comprehensive Correction Number Generation of Virtual Reference Station
a) Comprehensive correction parameters:

b) Non-difference observations:
4 Performance of CDC.NET + M300pro
The CDC.NET software is deployed on a physical server, with the environment configured to:
Item | Server configuration |
Unit type | 10SMCTO1WW |
Equipment characteristic | Intel(R)Core(TM)i5-8500CPU@3.00GHz,8GMemory installed |
OS | Windows10 64bit(10.0, version17763) |
Data base | MySQL5.5 |
Software version | CDC.NET 1.8.2 |
The test results:
Item | Performance |
System initialization time | Less than 2 minutes |
Rover initialization time | Less than 30 seconds |
Precision of inner coincidence | Horizontal 1.4cm and vertical 2.3cm |
Precision of outside coincidence | Horizontal 1.9cm and vertical 2.6cm |
Number of Base station access points | The reference station access number is 220, and the program is still stable |
Concurrent online users | Grid mode can reach a maximum capacity of more than 10,000 users |
System stability | The 100 Bases and 500 Rovers can operate stably for more than 30 days |
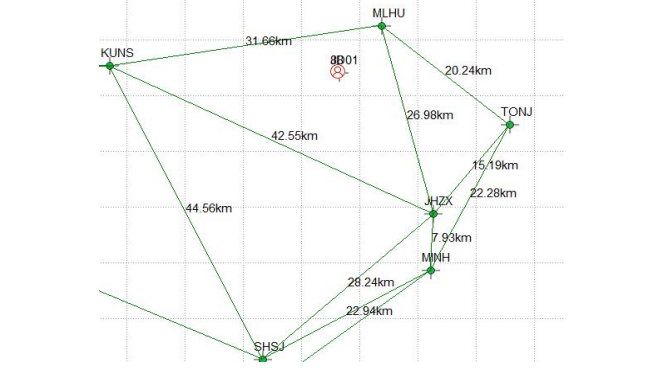
Two K708 boards(both firmware are 399A5) connected to the same antenna are connected to VRS services for CDC.NET 1.8.2 and NEAREST services for CDC +, respectively,to compare the positioning accuracy. The base station selected for connecting CDC + single base station service is MLHU (8KM from the rover),the station network connected to the VRS service is shown in below figure, the net-element is KUNS-JHZX-MLHU, the main reference station is MLHU, and the distance from the main reference station to the rover is 8KM.
Comparación de posicionamiento VRS y SRTK
Modo de posicionamiento | RMS horizontal (m) | RMS vertical (m) | Alcance horizontal (m) | Tasa de saturación de errores | Tasa fija |
VRS | 0.0073269 | 0.01224 | 0.04 | 0.86% | 100% |
MÁS CERCANO | 0.0061154 | 0.01021 | 0.03 | 0.45% | 100% |
El número de satélites calculados por los dos modos es el mismo, la precisión de posicionamiento horizontal y vertical del VRS es ligeramente inferior a la del SRTK, la tasa de rebasamiento de errores también fue mayor que la del SRTK, aún se necesita una mayor optimización.
A través de pruebas y verificaciones reales, la precisión de posicionamiento RTK de la red de CDC.NET está dentro del rango de 80 km por lado, y puede alcanzar la precisión de posicionamiento de 2 cm horizontalmente y 3 cm verticalmente en la red, que es mejor que la precisión de posicionamiento horizontal de 10 cm + D×10-6 y vertical de 10 cm + D×10-6 requerida por el diseño del sistema. Y la continuidad del posicionamiento del sistema, la usabilidad, la inicialización, el tiempo fijo y otros indicadores cumplen con los indicadores de rendimiento de posicionamiento RTK, que se encuentran en el nivel líder en la industria.
Notas:
1. Algunas fotos del artículo están tomadas de Internet, si tiene alguna pregunta, contáctenos a tiempo.
Acerca de la tecnología ComNav
ComNav Technology desarrolla y fabrica placas y receptores GNSS OEM para aplicaciones de posicionamiento de alta precisión. Su tecnología ya se ha utilizado en una amplia gama de aplicaciones, como topografía, construcción, control de máquinas, agricultura, transporte inteligente, sincronización precisa, monitoreo de deformaciones, sistemas no tripulados. Con un equipo dedicado a la tecnología GNSS, ComNav Technology está haciendo todo lo posible para suministrar productos confiables y competitivos a clientes de todo el mundo. ComNav Technology cotiza en la Bolsa de Valores de Shanghái (Junta de Ciencia y Tecnología), valores: ComNav Technology (Compass Navigation), código bursátil: 688592.
Acerca de SinoGNSS®
SinoGNSS® es la marca comercial oficial de ComNav Technology Ltd., registrada en la República Popular China, la UE, EE. UU. y Canadá. Todas las demás marcas comerciales son propiedad de sus respectivos dueños.