Informe de prueba de funcionamiento suave del módulo GNSS K803 Lite (L1) DP filter
ComNav Technology realizó una prueba sencilla sobre la función de suavizado del filtro DP del módulo K803 Lite (L1). Este informe presenta el rendimiento de posicionamiento suave del filtro DP del K803 Lite (L1) basado en la base teórica y los resultados de las pruebas, con el objetivo de ayudar a los usuarios a tener un conocimiento claro de la función suave del filtro DP y las aplicaciones relacionadas.
 1 Fundamentos teóricos
1 Fundamentos teóricos
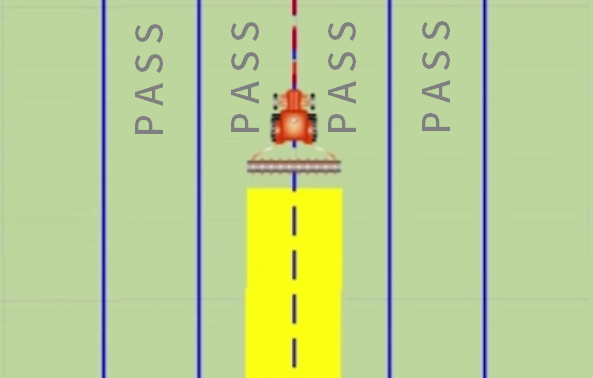
Fig. 1 Pase a pase
Con la ayuda del algoritmo suave del filtro DP, la precisión relativa de K803 Lite (L1) entre 2 épocas consecutivas está dentro de 1 cm en el modo de posicionamiento de un solo punto. Durante períodos más largos, como 15-30 minutos, la precisión de pase a pase se puede mantener dentro de los 15 cm en el 95% de los casos.
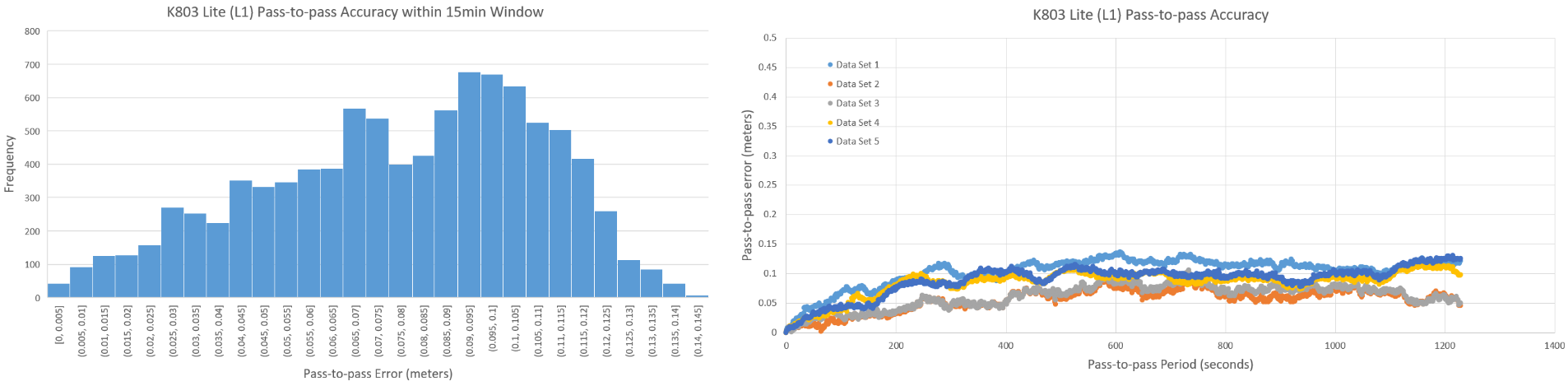
Fig. 2 & Fig. 3 Pass-to-pass accuracy of K803 Lite (L1) Module
2 Test Plan

Fig. 4 Testing route on Google Earth map
Device Model | Manufacture | Serial Number | Firmware |
K803 Lite (L1) GNSS Module | ComNav Technology | 09000053 | 600A9_a27 |

Fig. 5 Test Scene
(1) By comparing the coincidence of multiple trajectories on the straight line to analyze the pass-to-pass accuracy of K803 Lite (L1).
(2) By comparing the coincidence of DP-filter trajectories and RTK trajectories to analyze the overall accuracy of K803 Lite (L1).
The test was conducted for two rounds,
1st round | full constellation tracking | pushed the trolley for 17 laps |
2nd round | masked BDS-2 tracking | pushed the trolley for 31 laps |
3 Test Result
Since the single point accuracy of DP-filter positioning is within 1m. In order to facilitate trajectory comparison and analysis, the following test results have moved the starting point of the DP-filter data to the starting point of RTK data.
As shown in Fig. 6 & Fig. 7, the pass-to-pass accuracy of K803 Lite (L1) is about 10cm. There is no obvious track deviation within 17 laps.
In the end, the trajectory deviated from the RTK track by 5cm.
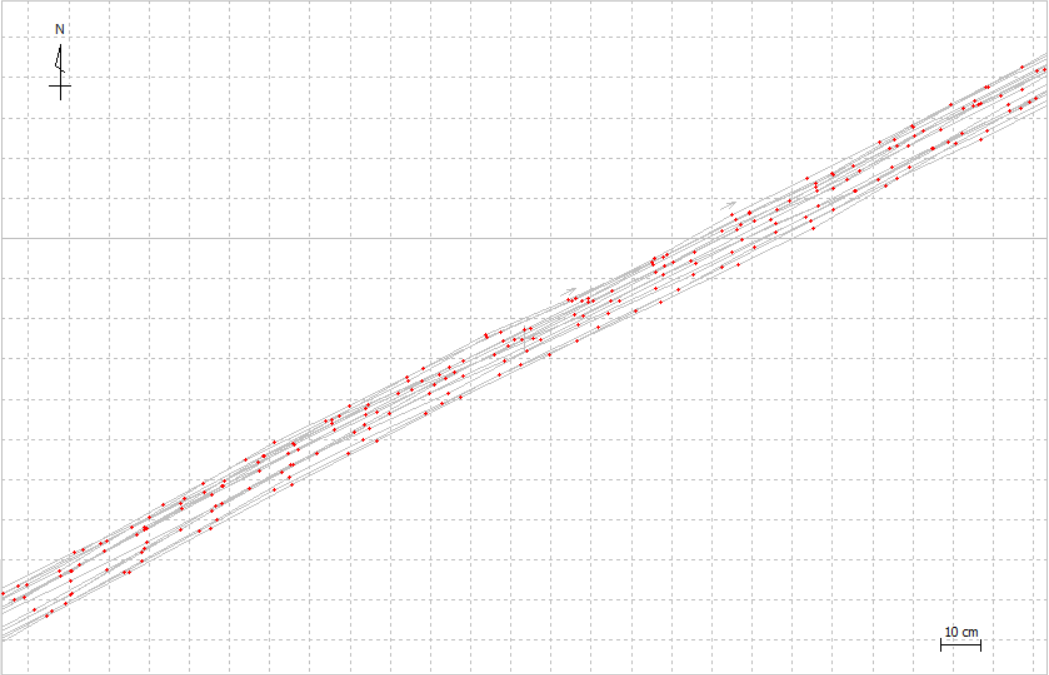
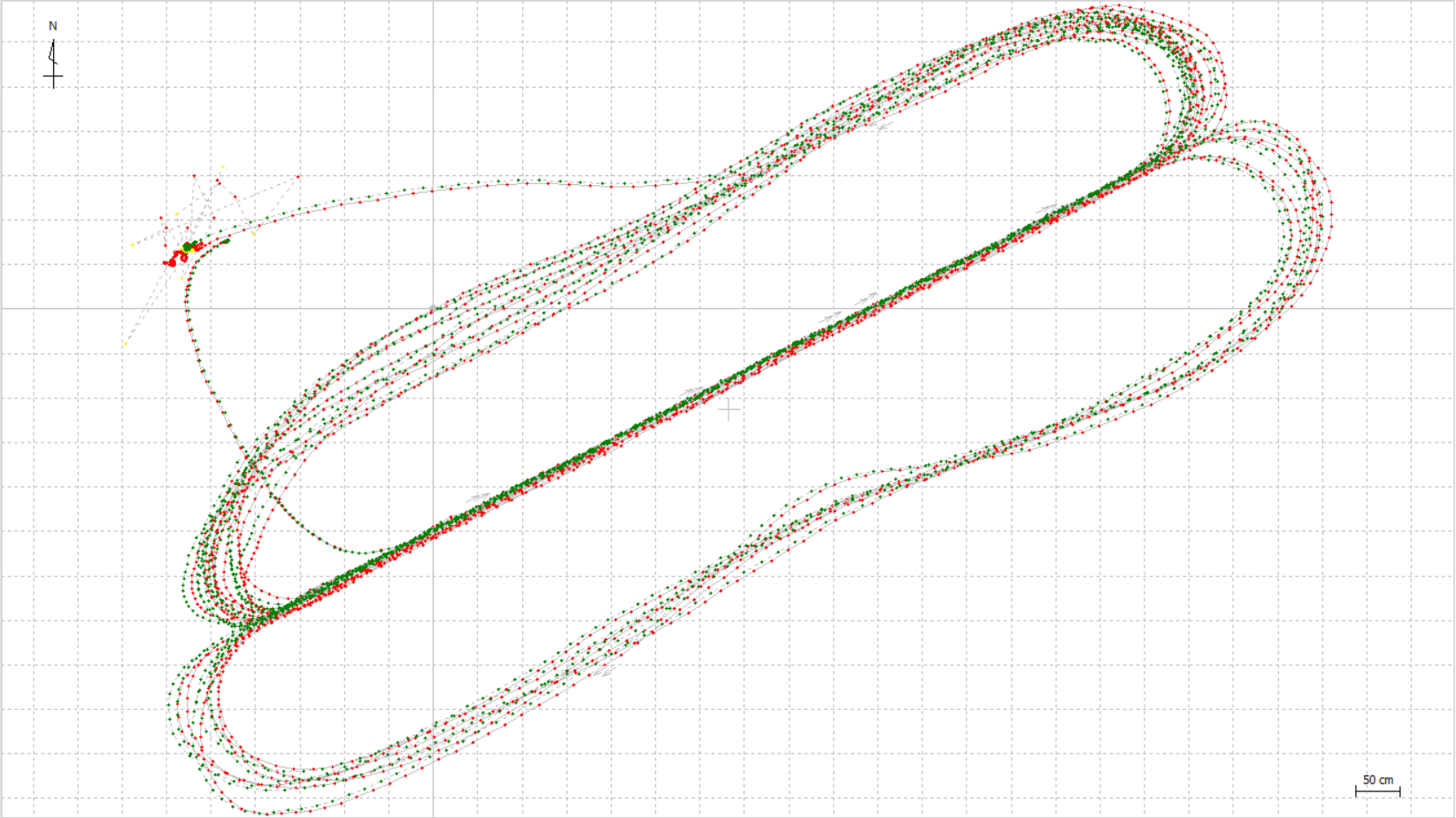
Fig. 6 y Fig. 7 Trayectoria de prueba de la Ronda 1, K803Lite (L1)-Rojo, RTK-Verde
Como se muestra en la Fig. 8 y la Fig. 9, la precisión de paso a paso de la frecuencia única K803 es de aproximadamente 15 cm, lo que también incluye el error humano al empujar el carro. No hay una desviación obvia de la pista en 31 vueltas.
Al final, la trayectoria se desvió 10 cm de la pista RTK.
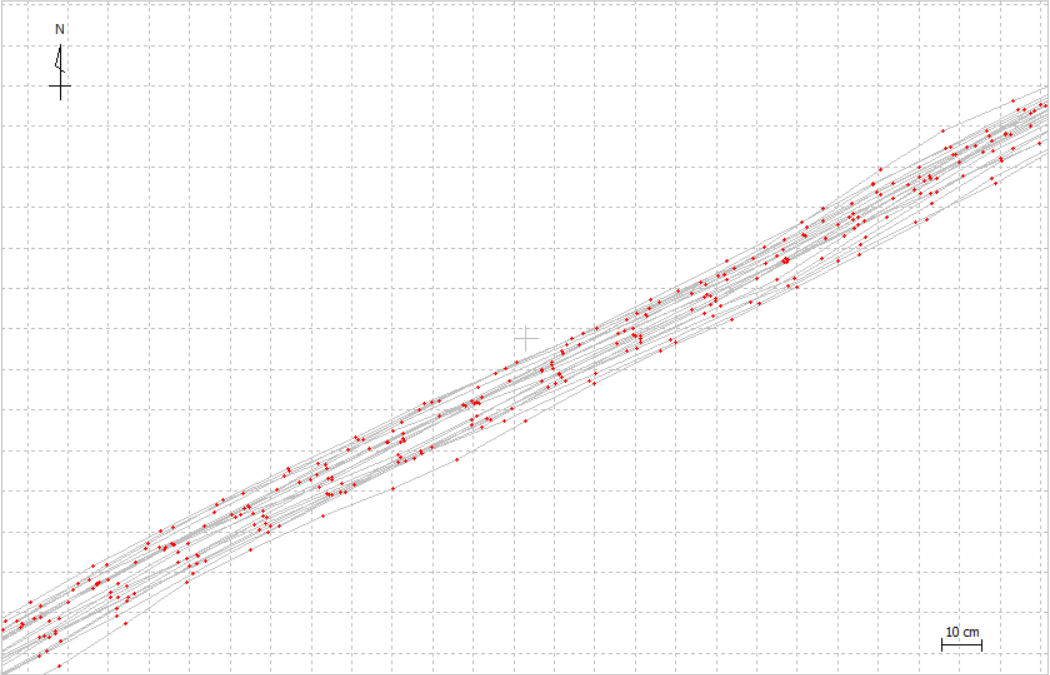
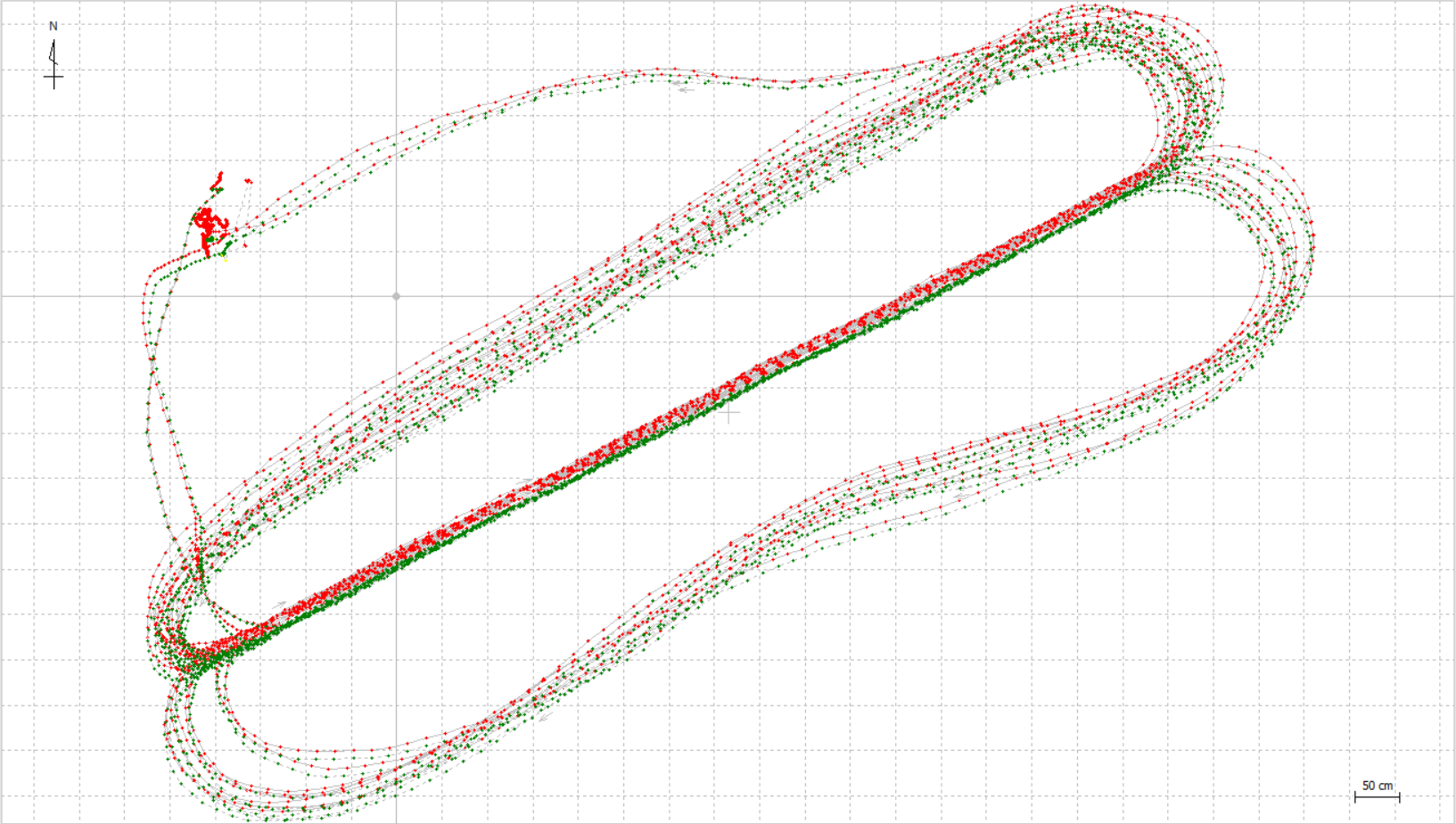
Fig. 8 y Fig. 9 Trayectoria de prueba de la Ronda 2, K803Lite (L1)-Rojo, RTK-Verde
4 Conclusión
Admite topografía con inclinación de IMU de hasta 60 grados.
Tabla 2: Resultados de las pruebas
Pase a pase (cm) | Desviación de RTK (cm) | |
1ª ronda (17 vueltas) | 10 | 5 |
2ª ronda (31 vueltas) | 15 | 10 |
* El error de paso a paso también incluye el error humano al empujar el carrito.
(1) La precisión de paso a paso de K803Lite (L1) podría alcanzar unos 15 cm, ya sea en el área cubierta por BDS-2 o no.
(2) El K803 Lite (L1) mostró un mejor rendimiento del filtro DP en una situación de seguimiento de constelación completa.
(3) La desviación de la trayectoria suave de K803 Lite (L1) a la trayectoria de contraste RTK está dentro de los 10 cm, ya sea en el área cubierta por BDS-2 o no.
Acerca de la tecnología ComNav
ComNav Technology desarrolla y fabrica placas y receptores GNSS OEM para aplicaciones de posicionamiento de alta precisión. Su tecnología ya se ha utilizado en una amplia gama de aplicaciones, como topografía, construcción, control de máquinas, agricultura, transporte inteligente, sincronización precisa, monitoreo de deformaciones, sistemas no tripulados. Con un equipo dedicado a la tecnología GNSS, ComNav Technology está haciendo todo lo posible para suministrar productos confiables y competitivos a clientes de todo el mundo. ComNav Technology cotiza en la Bolsa de Valores de Shanghái (Junta de Ciencia y Tecnología), valores: ComNav Technology (Compass Navigation), código bursátil: 688592.
Acerca de SinoGNSS®
SinoGNSS® es la marca comercial oficial de ComNav Technology Ltd., registrada en la República Popular China, la UE, EE. UU. y Canadá. Todas las demás marcas comerciales son propiedad de sus respectivos dueños.