Informe de análisis de rendimiento del servicio de alta precisión (HAS) de Galileo
 Introducción
Introducción
La tecnología de posicionamiento preciso de puntos (PPP) puede lograr un posicionamiento de alta precisión en cualquier parte del mundo. En comparación con la tecnología de posicionamiento diferencial dinámico en tiempo real, la tecnología PPP no requiere una red densa de estaciones de referencia, pero su precisión se basa en órbitas de satélites de alta precisión y productos de desviación de reloj. El sistema de navegación por satélite Galileo es un sistema mundial de navegación por satélite (GNSS) desarrollado conjuntamente por la Unión Europea (UE) y la Agencia Espacial Europea (ESA). Entre ellos, el Servicio de Alta Precisión (HAS) emitido por el sistema de navegación por satélite Galileo puede proporcionar servicios de posicionamiento de punto único (PPP) de precisión en tiempo real en todo el mundo. Desde el nacimiento del sistema de navegación por satélite Galileo, muchos académicos y expertos nacionales y extranjeros han llevado a cabo una gran cantidad de investigaciones sobre los modos de señal satelital, la calidad de los datos satelitales, los algoritmos de navegación, la evaluación del rendimiento de posicionamiento y otros aspectos basados en datos simulados o datos medidos. En comparación con la tecnología RTK, la tecnología PPP es un modo de posicionamiento de alta precisión basado en la corrección del dominio del espacio de estados. Desde la perspectiva del desarrollo tecnológico, integra la tecnología de posicionamiento estándar de un solo punto y la tecnología diferencial de área amplia, y puede lograr una precisión de posicionamiento a nivel centimétrico dentro de un marco de referencia global. En comparación con la tecnología RTK, PPP tiene las ventajas de requerir un solo receptor, sin necesidad de configurar una estación de referencia, distancia operativa ilimitada y bajo costo. Por lo tanto, tiene aplicaciones prometedoras en el mantenimiento y perfeccionamiento de los marcos de coordenadas regionales, la sincronización precisa, el monitoreo de terremotos, el monitoreo ionosférico, y gradualmente se ha convertido en una de las direcciones de investigación más populares en el campo de la navegación por satélite. La Fig.1 muestra la comparación entre el posicionamiento de un solo punto y los resultados de posicionamiento RTK utilizando PPP-HAS. Se puede ver que la precisión de posicionamiento PPP puede lograr una precisión de nivel decímetro. En lugares no cubiertos por la red RTK CORS, PPP se puede utilizar como posicionamiento de alta precisión para satisfacer las necesidades de posicionamiento de los usuarios en general. 
Fig.1 Comparación de los resultados de posicionamiento PPP-HAS y posicionamiento RTK del sitio de Bélgica
Este informe se centra en la precisión de la información de corrección proporcionada por HAS, y utiliza el programa PPP-HAS de desarrollo propio de SinoGNSS para evaluar el rendimiento de posicionamiento de los datos medidos nacionales y extranjeros.  Fig.2 Principio de funcionamiento de PPP-HAS
Fig.2 Principio de funcionamiento de PPP-HAS
1 Datos y método
1.1 Fuentes de datos y tratamiento
Este informe utiliza receptores de desarrollo propio de SinoGNSS para la recopilación de datos. El entorno de recolección de datos principalmente a cielo abierto. Las pruebas se realizaron en todo el mundo, seleccionando algunos países típicos para analizar el rendimiento en diferentes ubicaciones. Incluye cuatro sitios en China y un sitio en África, América del Sur, América del Norte y Europa, respectivamente. Los datos de varias estaciones se someten a pruebas continuas de PPP de varios días para su evaluación.

Fig.3 Entorno de prueba
Los datos de observación utilizados para evaluar la calidad del servicio HAS del sistema de navegación por satélite Galileo proceden de datos de 4 ciudades de China y 4 países de ultramar. La distribución específica del nombre del sitio y el tiempo de las muestras que se muestran en el artículo se muestran en la Tabla 1.
| Lugar de muestreo | Latitud | Longitud | Fecha de las estadísticas de muestreo de datos | Fecha de visualización de la imagen del informe |
|---|---|---|---|---|
| China-Shanghái (Asia) | 31.35°N | 121.29°E | 2023/09/01 - 2023/10/08 | 28/09 10:30-21:20 (estático) 18/09, 22/09 (dinámico) |
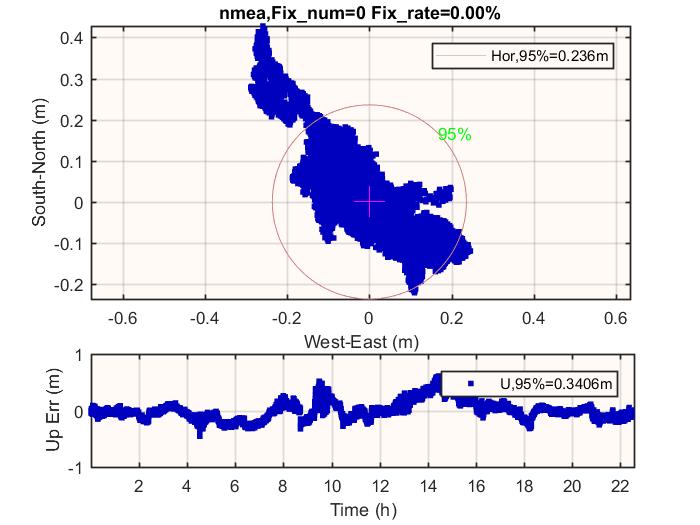
| China-Pekín (Asia) | 39.98°N | 116.41°E | 2023/10/17 - 2023/11/05 | 11/06 01:00-24:00 |
| China-Guangzhou (Asia) | 23.18°N | 112.42°E | 2023/12/02 - 2023/12/04 | 12/04 00:00-15:20 |
| China-Xinjiang (Asia) | 44.57°N | 86.62°E | 2023/10/17 - 2023/10/26 | 10/23 01:00-22:30 |
| Uganda (África) | 0.4150°N | 32.59°E | 2023/03/22 - 2023/03/26 | 03/22 16:30-00:00 |
| Brasil (América del Sur) | 25.49°S | 49.22°O | 2023/03/27 | 03/27 12:00-20:00 |
| Bélgica (Europa) | 50.35°N | 4.892°E | 2023/03/16 | 03/16 19:30-03/17 10:00 |
| Canadá (América del Norte) | 53.60°N | 113.92°O | 2023/12/13 | 12/13 00:00-04:00 |
Table 2 shows the processing methods of ambiguity, clock bias and other related parameters in the positioning process.
| Main Parameters | Solution Strategy |
|---|---|
| Observations | Ionosphere-free combined pseudo-range and carrier wave observations |
| Sampling Rate | 1Hz |
| Phase wrapping | Model correction |
| Solid earth tide, ocean tide | Model correction |
| Parameter estimation method | Robust Kalman Filter |
| Ionospheric delay | Ionospheric-free combined elimination |
| Ambiguity | Parameter Estimation |
| Tropospheric delay | Parameter Estimation |
| Satellite clock bias, orbit | Using Galileo HAS products |
| Cycle slip detection | Melbourne-Wübbena combination and geometric distance-free combination |
1.2 Position methods
When using PPP-HAS for positioning, the basic observation equation of pseudorange and carrier wave is:
\( P_i = \rho_i + I_i + T + cdt_{r} - cdt^s - c(B_{r} + B^s) + \epsilon_{P} \) (Eq.1)
\( \Phi_i = \rho_i - I_i + T + cdt_{r} - cdt^s - c(b_{r} + b^s) + \lambda_i N_i + \epsilon_{\Phi} \) (Eq.2)
P represents the pseudo-range observation value, Φ represents the carrier observation value, λ represents the carrier phase wavelength, i represents that the error is related to the frequency of the signal, ρ represents the geometric distance between the satellite and the receiver, dtr and dts are the receiver clock bias and satellite clock bias respectively, I represents the ionospheric delay, T represents the tropospheric delay, Br, and Bs respectively represent the receiver-side hardware delay and satellite-side hardware delay of the pseudo-range part, br and bs respectively represent the receiver-side hardware delay and satellite-side hardware of the carrier part, N is the integer ambiguity of the carrier phase signal in cycles, ξ represents observation noise and other errors not modeled. When performing PPP positioning, establish an ionosphere-free combined model according to Eq. 3 and Eq. 4.
\( P_{IF} = \frac{f_1^2 P_1 - f_2^2 P_2}{f_1^2 - f_2^2} = \rho + cdt_{r} - cdt^{s} + T + \epsilon_{P_{IF}} \) (Eq.3)
\( \Phi_{IF} = \frac{f_1^2 \Phi_1 - f_2^2 \Phi_2}{f_1^2 - f_2^2} = \rho + cdt_{r} - cdt^{s} + T + \lambda_{IF} N_{IF} + \epsilon_{\Phi_{IF}} \) (Eq.4)
La Ec. 3 y la Ec. 4 son las ecuaciones de observación combinadas libres de ionosfera. El modelo de combinación combinada libre de ionosfera puede eliminar la influencia de la ionosfera de primer orden. Los parámetros que deben estimarse sólo incluyen 3 parámetros de posición, la polarización del reloj del receptor, el retardo troposférico cenital y la ambigüedad de la fase de la portadora combinada. Una vez establecido el modelo, se seleccionan las estaciones de base nacionales y extranjeras para recibir los datos de observación por satélite y los datos del HAS, y los parámetros pertinentes se procesan de acuerdo con el Cuadro 2. La Fig.4 se utiliza para verificar el posicionamiento preciso libre de ionosfera.
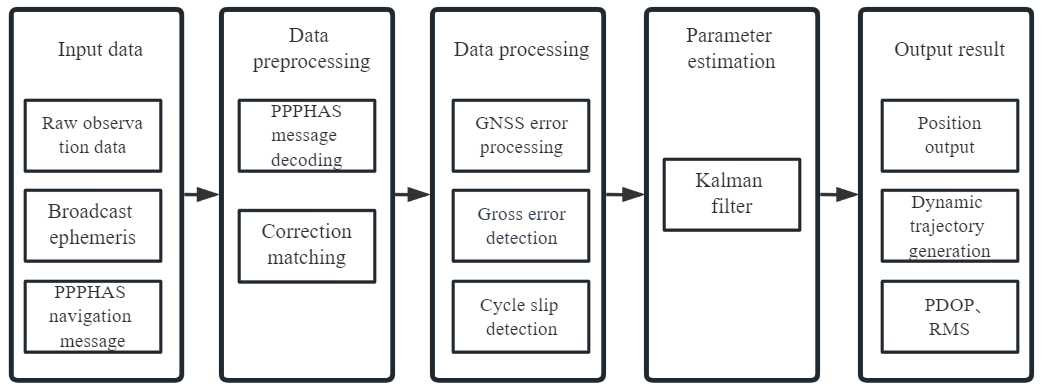
Fig.4 Proceso de algoritmo de posicionamiento de un solo punto de precisión basado en el servicio PPP-HAS
2 Análisis de rendimiento en escena estática
2.1 Desempeño de PPP-HAS en China
En esta sección se utiliza principalmente PPP-HAS para evaluar la precisión del posicionamiento. Las Fig.5-Fig.12 muestran las desviaciones de posicionamiento PPP en cuatro ciudades diferentes, donde el eje horizontal es el tiempo GPS. A partir de la figura, podemos ver los resultados de posicionamiento del sitio después de que los resultados convergen. Los resultados de posicionamiento doméstico se calculan estadísticamente y se promedian para obtener el resultado final.
Cuando la precisión horizontal de los resultados de posicionamiento está dentro de los 20 cm y la precisión durante 100 épocas consecutivas no supera los 20 cm, se considera que los resultados han convergido. En el cuadro 3 se presentan estadísticas medias de los resultados de posicionamiento de cuatro emplazamientos nacionales.
| Sitios | E-S/cm | N-W/cm | U-D/cm | 2D RMS horizontal/cm (95%) | Altura 2D RMS/cm (95%) | Tiempo de convergencia /min |
|---|---|---|---|---|---|---|
| Shanghái | 8.7 | 6.1 | 17.9 | 19.7 | 26.9 | 23.8 |
| Beijing | 8.2 | 4.9 | 18.3 | 29.8 | 20.4 | 27.8 |
| Xinjiang | 9.2 | 8.9 | 16.3 | 21.4 | 33.0 | 27.4 |
| Guangzhou | 7.6 | 5.1 | 14.1 | 11.6 | 18.2 | 29.6 |
| Valor medio | 8.4 | 6.3 | 16.7 | 20.6 | 24.6 | 24.7 |
A continuación, puede obtener información detallada sobre cada estación para mayor precisión.
 Sitio 1: Shanghái
Sitio 1: Shanghái
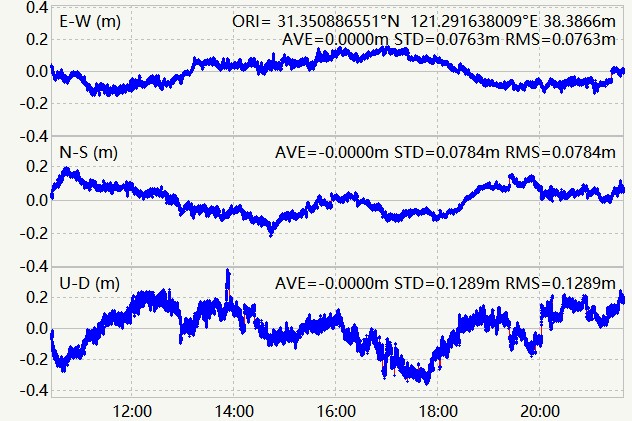 Fig.5 Solución de posicionamiento PPP-HAS del sitio de Shanghái |
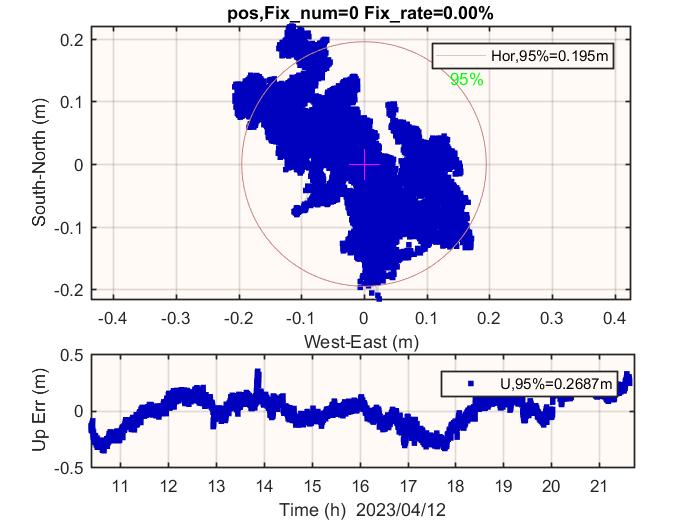 Fig.6 Mapa de posicionamiento del plano del sitio de Shanghái |
Sitio 2: Pekín
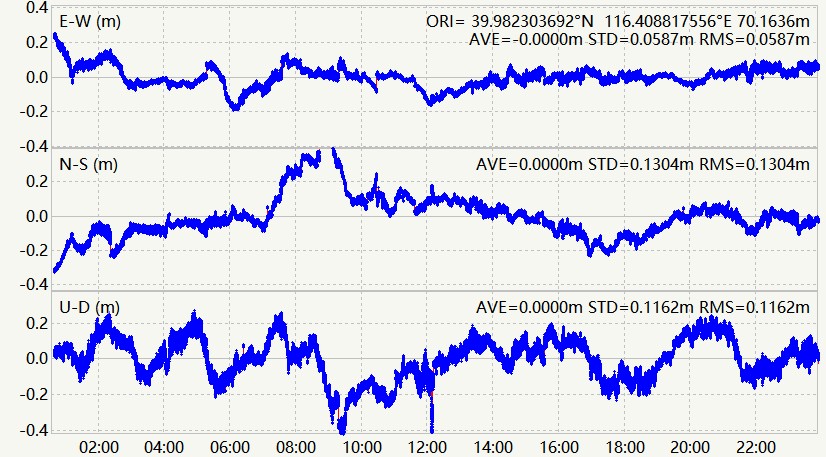 Fig.7 Solución de posicionamiento PPP-HAS del sitio de Beijing |
 Fig.8 Mapa de posicionamiento del plano del sitio de Beijing |
Site 3: Xinjiang province
 Higo.9 Solución de posicionamiento PPP-HAS del sitio de Xinjiang |
 Higo.10 Mapa de posicionamiento del avión del sitio de Xinjiang |
Sitio 4: Provincia de Guangzhou
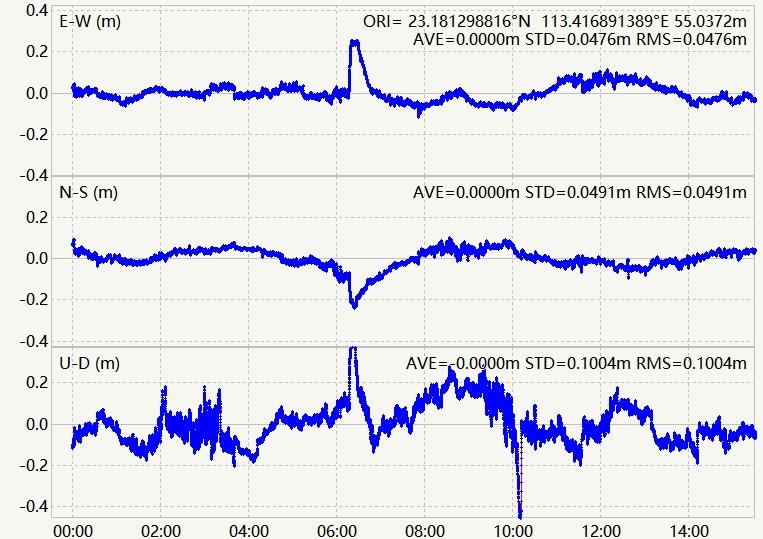 Fig.11 Solución de posicionamiento PPP-HAS del sitio de Guangzhou |
 Higo.12 Mapa de posicionamiento del plano del sitio de Guangzhou |
2.2 Rendimiento de PPP-HAS en todo el mundo
A excepción de las pruebas en China, seleccionamos algunos países típicos para realizar las pruebas de rendimiento. Las Fig.13-Fig.20 muestran las desviaciones de posicionamiento de cada sitio. En la Tabla 4 se muestra el promedio de precisión de varios días y el tiempo de convergencia de los sitios seleccionados.
| Sitios | E-S/cm | N-W/cm | U-D/cm | 2D RMS horizontal/cm (95%) | Altura 2D RMS/cm (95%) | Tiempo de convergencia /min |
|---|---|---|---|---|---|---|
| Uganda | 5.2 | 4.9 | 11.3 | 17.5 | 25.8 | 17.6 |
| Brasil | 6.3 | 3.0 | 12.1 | 24.0 | 25.1 | 13.8 |
| Bélgica | 4.5 | 6.6 | 13.3 | 10.4 | 17.0 | 16.4 |
| Canadá | 7.3 | 7.9 | 8.5 | 26.8 | 15.7 | 15.7 |
| Valor medio | 5.83 | 5.6 | 11.3 | 19.67 | 20.9 | 15.87 |
A continuación, puede obtener información detallada sobre cada estación para mayor precisión.
Sitio 1: Uganda en África
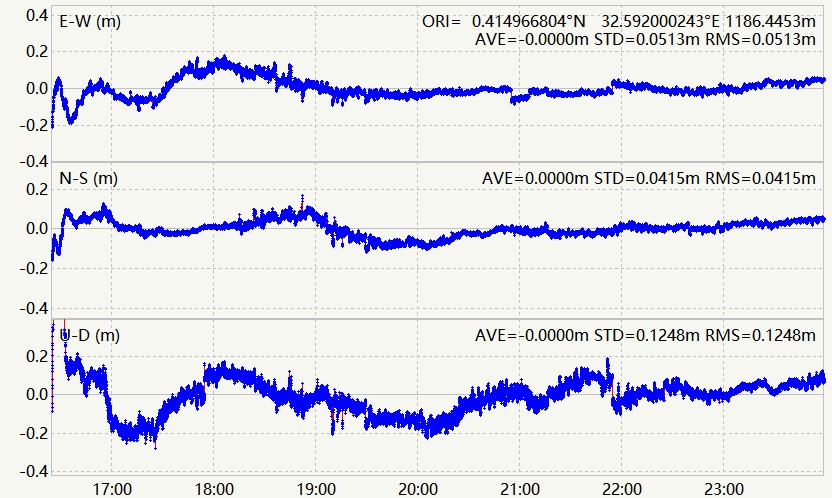 Fig.13 Solución de posicionamiento PPP-HAS del sitio de Uganda |
 Fig.14 Mapa de posicionamiento del plano del sitio de Uganda |
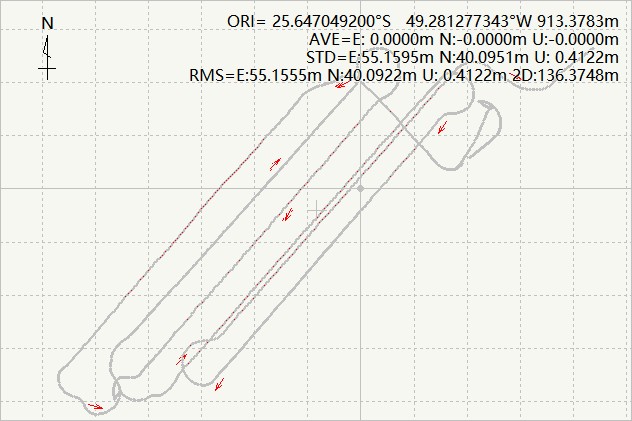
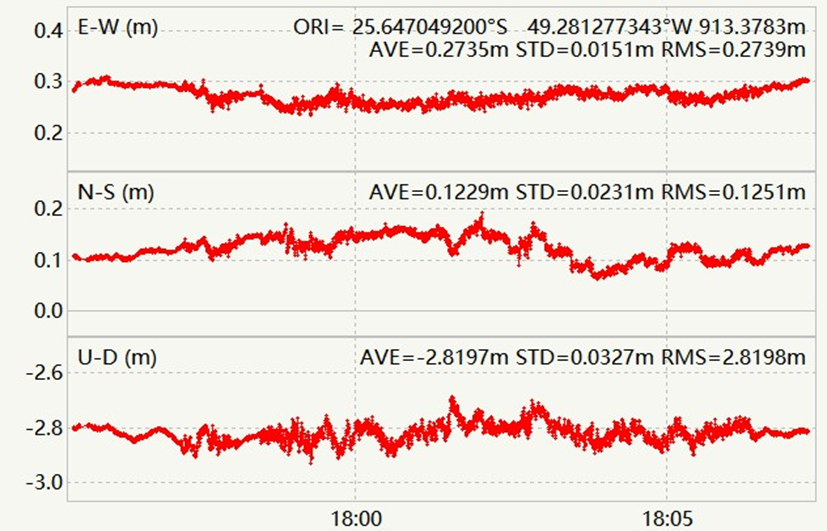
Sitio 2: Brasil en América del Sur
 Fig.15 Solución de posicionamiento PPP-HAS de la planta de Brasil |
 Fig.16 Mapa de posicionamiento del plano del sitio de Brasil |
Sitio 3: Bélgica en Europa
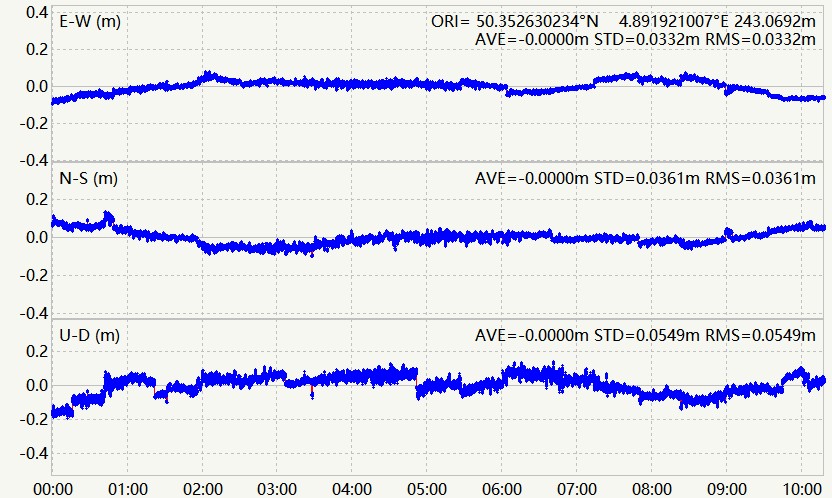 Fig.17 Solución de posicionamiento PPP-HAS de la planta de Bélgica |
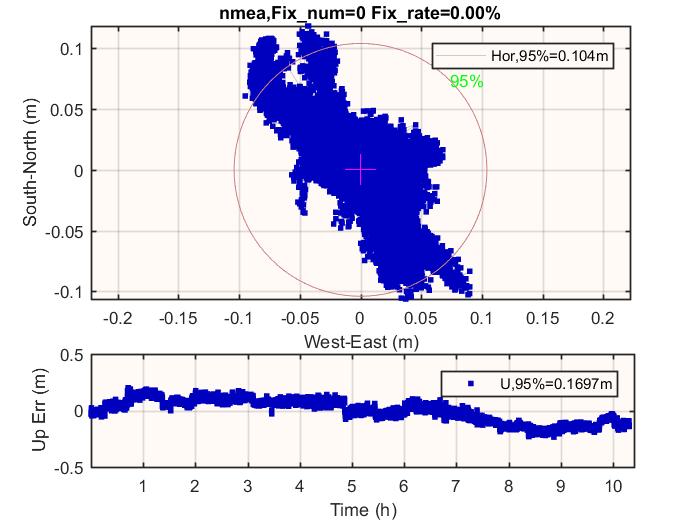 Fig.18 Mapa de posicionamiento del plano del sitio de Bélgica |
Sitio 4: Canadá en América del Norte
 Fig.19 Solución de posicionamiento PPP-HAS del sitio de Canadá |
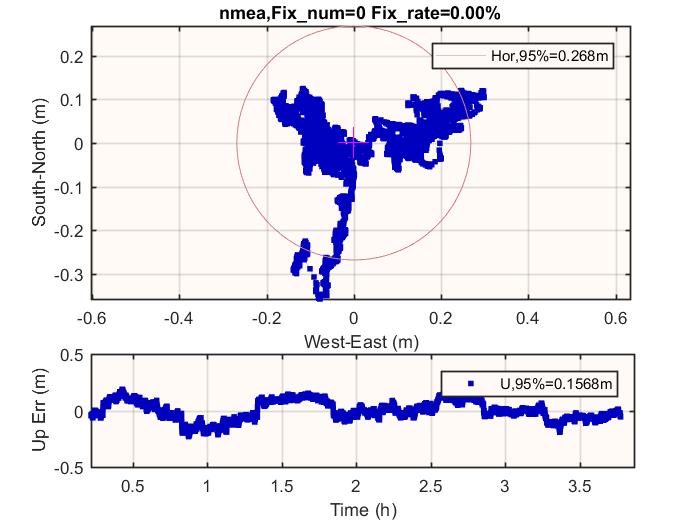 Fig.20 Mapa de posicionamiento del plano del sitio de Canadá |
3 Análisis de rendimiento en escena dinámica
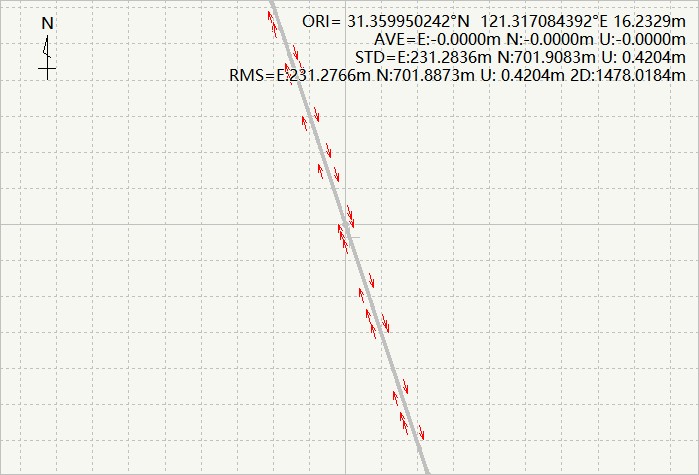
Con el fin de examinar el rendimiento del posicionamiento dinámico de precisión de un solo punto en tiempo real basado en el servicio PPP-HAS, se llevó a cabo un experimento de prueba dinámica de vehículos del 1 de septiembre al 10 de octubre de 2023. El módulo utilizado fue la placa SinoGNSS K803, y el entorno era un entorno abierto. La Fig.23 muestra los resultados de las pruebas en Shanghái el 7 de noviembre, la Fig.26 muestra los resultados de las pruebas en Brasil el 4 de diciembre. En comparación con los resultados de RTK de alta precisión, se puede ver que la diferencia entre los resultados de posicionamiento de PPP-HAS dinámicos en tiempo real después de la estabilidad y los resultados de posicionamiento de RTK de alta precisión está en el nivel de decímetro.
Fig.21 Resultados de posicionamiento dinámico en tiempo real de PPP-HAS-1 |
Fig.22 Diferencia entre los resultados de PPP-HAS y RTK-1 |
Fig.23 Resultados de posicionamiento dinámico en tiempo real de PPP-HAS-2 |
Fig.24 Diferencia entre PPP-HAS y RTK-2 |

Conclusión
El servicio HAS PPP de Galileo cubre la gran mayoría de los países del mundo, con un tiempo medio de convergencia de 15 a 20 minutos y una precisión media de 20 cm 2D RMS después de la convergencia. Los países europeos tienden a experimentar un mejor desempeño en comparación con otros.
El Servicio de Alta Precisión (HAS) de Galileo, una solución gratuita de posicionamiento preciso de puntos (PPP) basada en satélites, ofrece beneficios sin precedentes en una gran variedad de aplicaciones. Desde la topografía tradicional y la recopilación de datos GIS hasta entornos dinámicos como la agricultura de precisión, los vehículos aéreos no tripulados y la conducción inteligente, Galileo HAS revoluciona el posicionamiento global con su precisión y fiabilidad.
Acerca de la tecnología ComNav
ComNav Technology desarrolla y fabrica placas y receptores GNSS OEM para aplicaciones de posicionamiento de alta precisión. Su tecnología ya se ha utilizado en una amplia gama de aplicaciones, como topografía, construcción, control de máquinas, agricultura, transporte inteligente, sincronización precisa, monitoreo de deformaciones, sistemas no tripulados. Con un equipo dedicado a la tecnología GNSS, ComNav Technology está haciendo todo lo posible para suministrar productos confiables y competitivos a clientes de todo el mundo. ComNav Technology cotiza en la Bolsa de Valores de Shanghái (Junta de Ciencia y Tecnología), valores: ComNav Technology (Compass Navigation), código bursátil: 688592.
Acerca de SinoGNSS®
SinoGNSS® es la marca comercial oficial de ComNav Technology Ltd., registrada en la República Popular China, la UE, EE. UU. y Canadá. Todas las demás marcas comerciales son propiedad de sus respectivos dueños.