Un projet de cartographie de drone RTK réussi avec DJI Phantom 4 RTK et SinoGNSS T300 Plus
1. Aperçu du projet
Une zone résidentielle rurale de Shanghai couvrant 250000m² (comme le montre la Fig.1) doit être mesurée et cartographiée pour obtenir une carte très précise. Avec une grande superficie, des contraintes de temps et un personnel inadéquat, l’utilisation de méthodes d’arpentage traditionnelles est difficile à mener à bien. Ainsi, une excellente solution combinant le récepteur GNSS Phantom 4 RTK (ci-après dénommé P4R) et le récepteur GNSS T300 Plus est proposée sans points de contrôle d’image, avec un travail sur le terrain de courte durée et une économie de main-d’œuvre.

Fig. 1 Environnement du site
2. Défis
L’environnement rural est couvert d’un réseau 4G médiocre car normalement les stations de base et les drones transmettent des flux de correction via la 4G.
Aucun point de contrôle d’image ne réduira la charge de travail mais n’entraînera aucune validation de la précision.
Les opérateurs de projet sont confrontés à des défis techniques car la nouvelle méthode d’arpentage est très différente de la méthode traditionnelle.
3. Avantage
Moins de charge de travail : Par rapport à la cartographie traditionnelle des drones, la cartographie des drones RTK dépend moins des points de contrôle car elle est de haute précision, ce qui réduira la charge de travail dans une large mesure.
Connexion WIFI : Équipé d’un module WIFI, le T300 Plus peut transmettre des données facilement, sans restriction d’Internet.
Validation de la précision : En plus d’être une station de base, le T300 Plus peut également fonctionner comme un rover pour mesurer les coordonnées des points de contrôle pour la validation de la précision.
Facile à utiliser : Configuration facile et flux de travail simple, pas de seuil pour les utilisateurs.
Sauvegarde PPK : Pour éviter les situations où RTK n’est pas applicable, T300 Plus fournit également PPK comme plan de sauvegarde, qui peut être effectué simultanément avec RTK.
4. Résumé du projet
4.1 Date de l’événement
Les travaux sur le terrain ont été terminés le 26/10/2020, les travaux de bureau ont été effectués du 26/10/2020 au 27/10/2020.
4.2 Emplacement
Village de Beixin, district de Jiading, Shanghai, Chine
4.3 Instruments
1 × DJI Phantom 4 RTK
1 × récepteur GNSS T300 Plus
5 × coches
4.4 Logiciel
Maître d’enquête
Pix4Dmapper
4.5 Procédure
4.5.1 Configurer des points de contrôle
5 points de contrôle ont été placés uniformément sur la zone de cartographie, dont la distribution a été montrée à la Fig. 2. Les coordonnées ont été relevées par le récepteur SinoGNSS® T300 Plus via le logiciel Survey Master en mode PDA CORS. Survey Master améliore la commodité et la fiabilité de ce projet de mesure grâce à sa forte fonctionnalité et à son flux de travail simplifié. Sans avoir besoin d’une manette, il peut être facilement téléchargé sur Google Play Store et installé sur un smartphone Android.
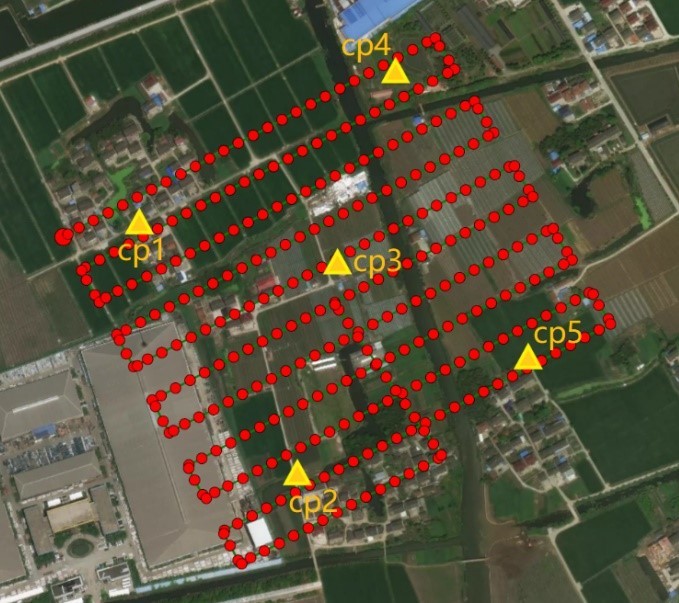
Fig. 2 Distribution des points de contrôle marqués en jaune
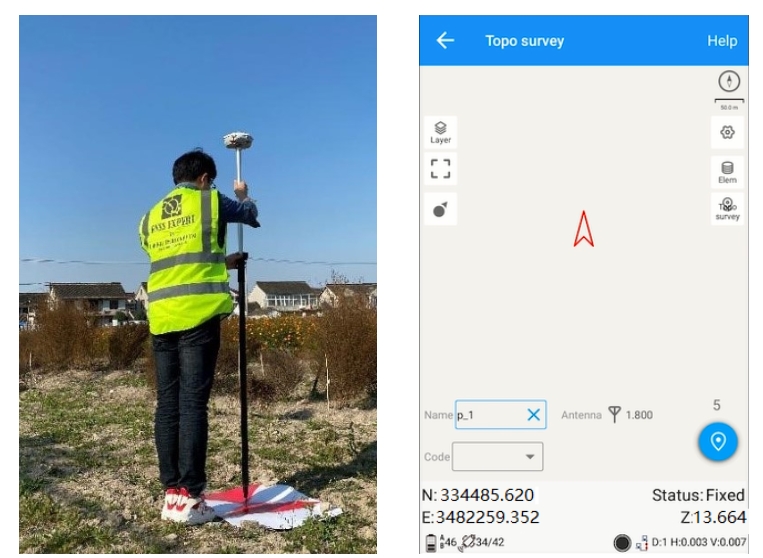
Fig. 3 Mesure du point de contrôle (L) et interface principale de topographie (R)
Les points de contrôle n’ont été utilisés que pour la validation de la précision sans participer au traitement des données, ce qui n’a eu aucune influence sur le résultat final.
4.5.2 Configurer la station de base
Sur le point de contrôle (point connu) de la zone de cartographie, T300 Plus a été configuré comme station de base pour transmettre les données de correction à P4R, connecté à P4R via une liaison WIFI. Grâce à l’interface utilisateur Web du T300 Plus (illustrée à la Fig. 5), il est facile de configurer les coordonnées de points connues et les paramètres associés sur la télécommande P4R.

Fig. 4 Base Station
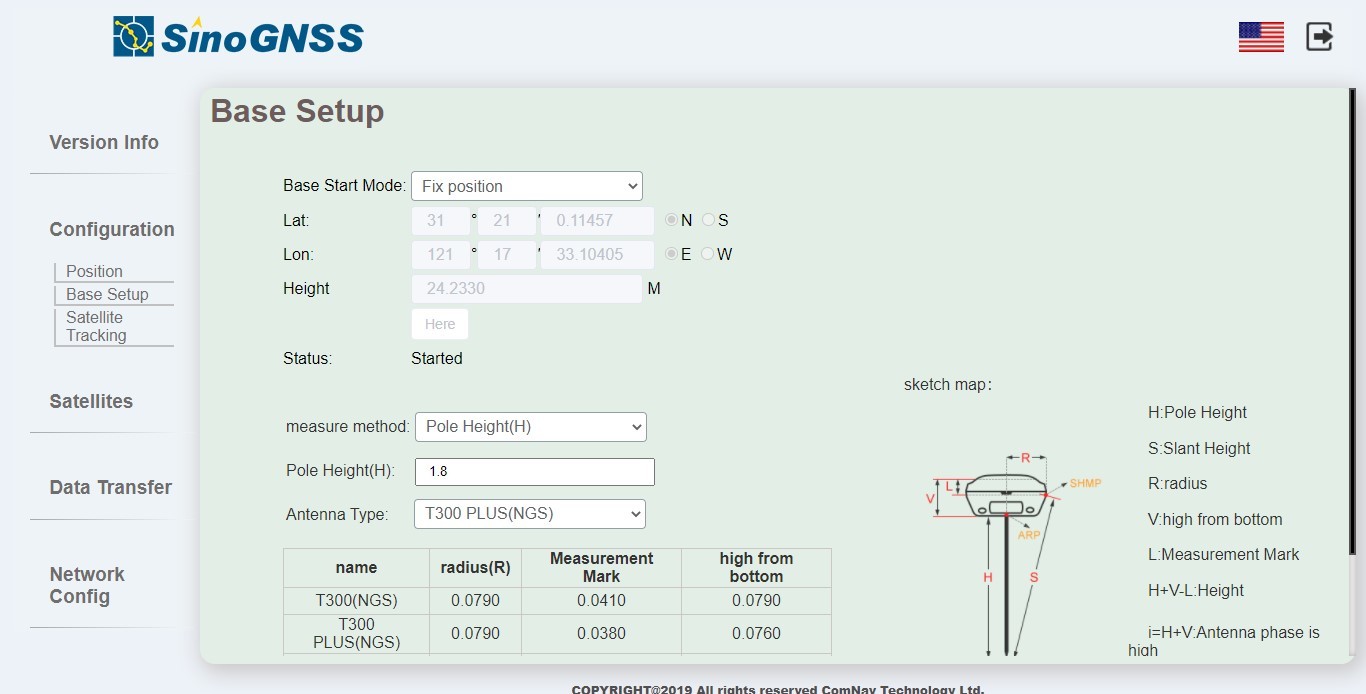
Fig. 5 Interface utilisateur Web du T300 Plus
4.5.3 Configuration de l’UAV
L’itinéraire de vol et les paramètres correspondants ont été configurés sur la télécommande avant le vol, qui sont donnés dans l’onglet 1 et la Fig. 6, respectivement. Il n’a fallu que 13 minutes pour que la cartographie par drone collecte un total de 333 données d’images dans la grande zone du site de 250000 m2. Lors de la prise de vue de chaque image, les coordonnées du CMOS ont été relevées via le module RTK et attachées à chaque donnée d’image.
Onglet 1 : Paramètres de vol
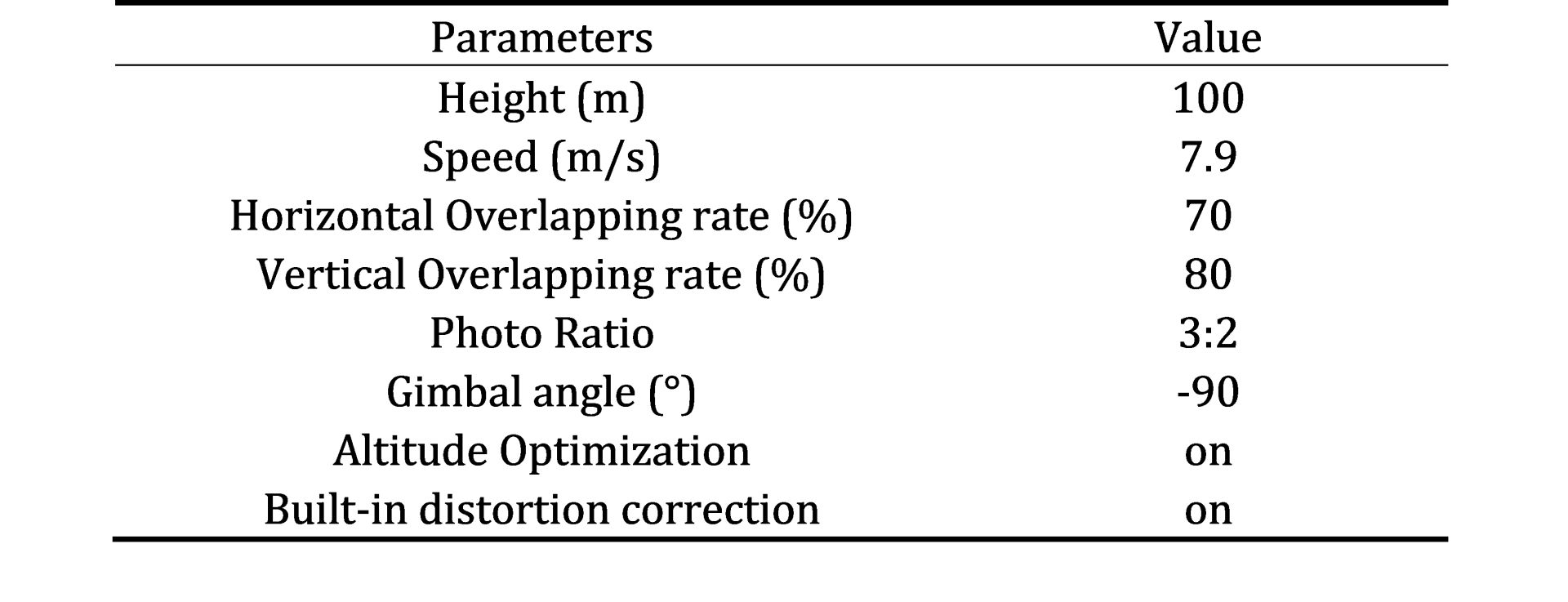

Fig. 6 Itinéraire de vol
4.5.4 Traitement des données
Après l’entrée des images P4R dans Pix4Dmapper, les processus connexes se sont exécutés automatiquement, y compris l’initialisation, l’assemblage des images, la correction de la distorsion, etc., et enfin les résultats DOM (Digital Orthophoto Map) et DSM (Digital Surface Model) ont été générés, comme le montrent les Fig. 7 et Fig. 8. La GSD (distance moyenne d’échantillonnage au sol) est de 2,95 cm.
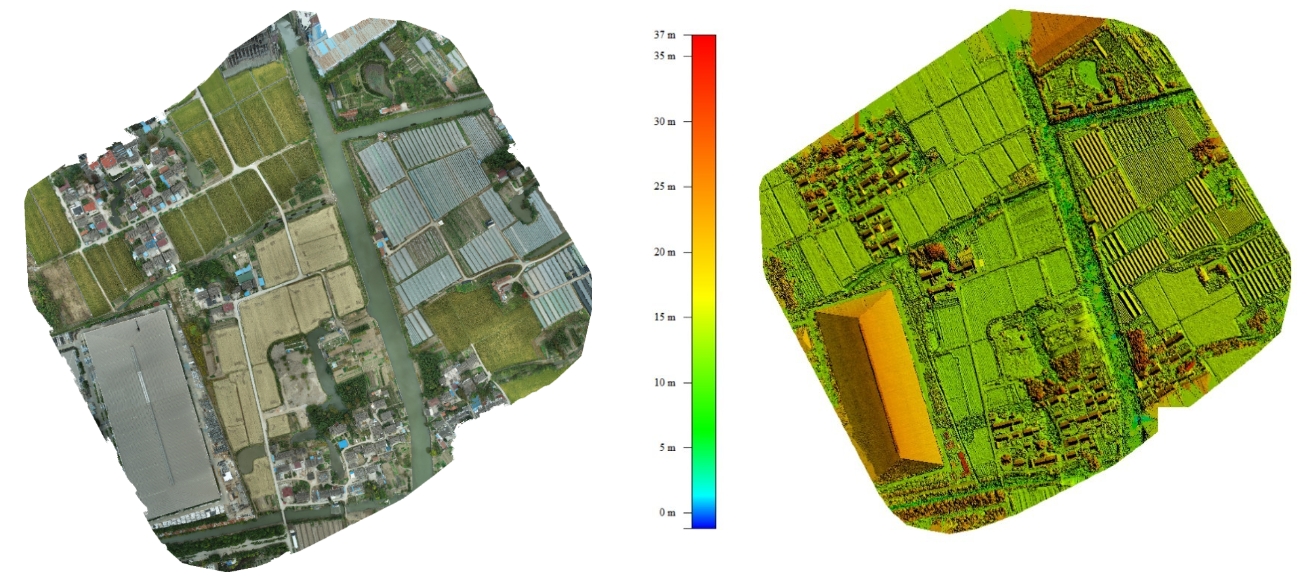
Fig. 7 Résultat DOM (L) Fig. 8 Résultat DSM (R)
4.5.5 Validation de l’exactitude
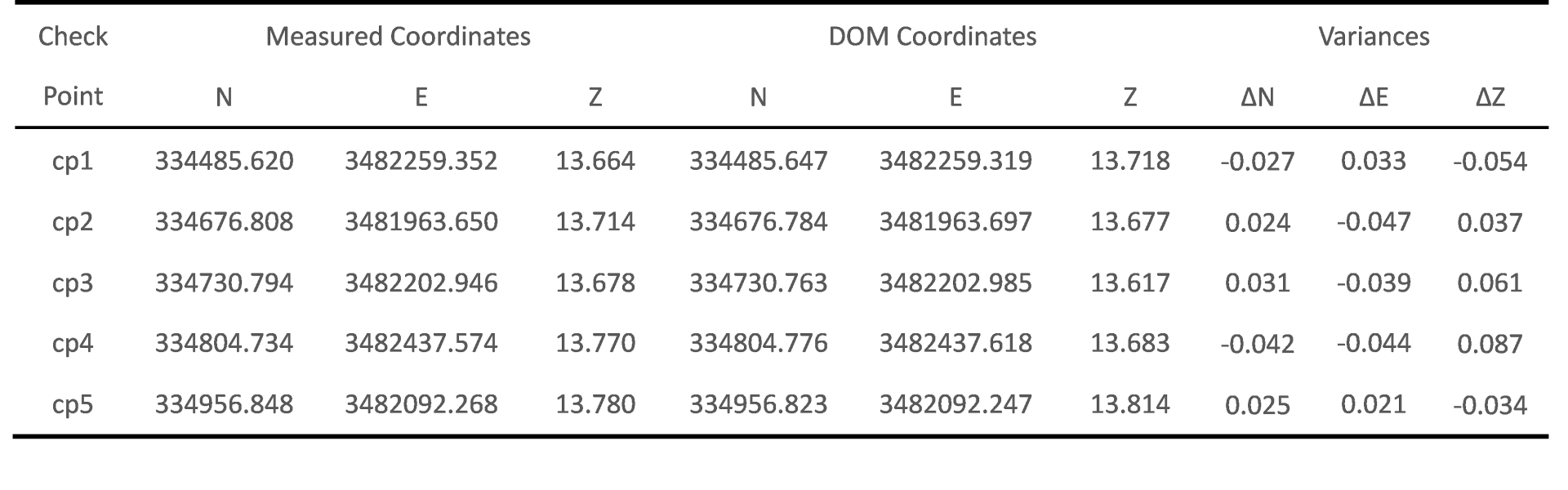
Sur la base des points de contrôle mesurés, les écarts entre les coordonnées DOM et les coordonnées mesurées ont été calculés pour valider la précision. Ils mesurent à moins de 10 cm verticalement et de 5 cm horizontalement, comme illustré à l’onglet 2 ci-dessous.
Onglet 2 : Exactitude des points de contrôle
5. En conclusion
En conclusion, par rapport à la cartographie traditionnelle par drone ou à l’arpentage, la cartographie par drone RTK avec P4R a démontré une plus grande efficacité, un flux de travail plus simple et une charge de travail réduite. ce qui peut économiser à la fois du temps et de la main-d’œuvre, transformant une grande partie du travail sur le terrain en travail de bureau. La solution de cartographie combinant une station de base T300 Plus continue et fiable avec un drone commercial de Phantom 4 RTK peut fournir une précision de cartographie centimétrique pour répondre à la plupart des demandes de travail d’arpentage. Ainsi, il est à la fois de haute précision et rentable.
En tant qu’élément indispensable de cette solution de cartographie, le récepteur T300 Plus a joué un rôle de secours puissant. La prise en charge de la connexion WIFI permet une transmission stable des flux de correction. Son interface utilisateur Web intégrée facilite la configuration. Le plan de sauvegarde PPK réduit la dépendance absolue à RTK. L’étude de haute précision du rover permet de valider la précision de la cartographie des drones. On peut dire que c’est le meilleur choix de station de base de sa catégorie pour la cartographie par drone.
Pour plus d’informations sur l’étude de cas, veuillez consulter le lien ci-dessous.
https://cetest02.cn-bj.ufileos.com/fsite_1802020370/DJI_CaseStudy.pdf
À propos de ComNav Technology
ComNav Technology développe et fabrique des cartes et des récepteurs GNSS OEM pour les applications de positionnement de haute précision. Sa technologie a déjà été utilisée dans un large éventail d’applications telles que l’arpentage, la construction, le contrôle des machines, l’agriculture, le transport intelligent, le chronométrage précis, la surveillance des déformations, les systèmes sans pilote. Avec une équipe dédiée à la technologie GNSS, ComNav Technology fait de son mieux pour fournir des produits fiables et compétitifs à des clients du monde entier. ComNav Technology a été cotée à la Bourse de Shanghai (Science and Technology Board), valeurs mobilières :ComNav Technology (Compass Navigation), Code boursier : 688592.
À propos de SinoGNSS®
SinoGNSS® est la marque officielle de ComNav Technology Ltd., déposée en République populaire de Chine, dans l’UE, aux États-Unis et au Canada. Toutes les autres marques sont la propriété de leurs propriétaires respectifs.