
Rapport de test du module GNSS OEM de la série K8 - ComNav Technology
Les nouveaux modules de la série K8 sont équipés de la puce SoC Quantum III de haute précision de nouvelle génération de ComNav Technology, capable de suivre toutes les constellations GNSS actuelles et prévues. De plus, les modules de la série K8 s’intègrent à une unité de mesure inertielle (IMU) de qualité tactique.
Traditionnellement, ces systèmes sont coûteux, consomment beaucoup d’énergie et ont un volume élevé ; cependant, les modules de la série K8 surmontent totalement ces faiblesses. Avec des performances robustes et une intégration facile, les modules de la série K8 peuvent être appliqués dans une large gamme d’applications, allant des domaines GNSS spécialisés de haute précision au marché de consommation.
Afin de vérifier les performances de K8, l’équipe de R&D de ComNav Technology a effectué un test de contraste sur le terrain en examinant les modules OEM de la série K8 et trois autres fabricants dans des environnements différents. Les scènes de test dynamiques et statiques sont choisies afin d’avoir une compréhension complète des performances des modules K8. Des corrections RTK de base unique ont été utilisées dans cette expérience.
1. Essai dynamique monté sur véhicule
En condition dynamique, l’équipe de recherche et développement a effectué respectivement l’essai dynamique monté sur véhicule et l’essai dynamique monté sur wagon à basse vitesse. M1, M2, M3 représentent trois autres fabricants, parmi lesquels les modules de K8 et M1 avaient un module IMU alors que les modules M2 et M3 n’en avaient pas.
Les données ont été collectées à la mi-2020, ciblant principalement tout l’environnement classique du système de navigation. L’itinéraire d’essai est donné à la figure 1.
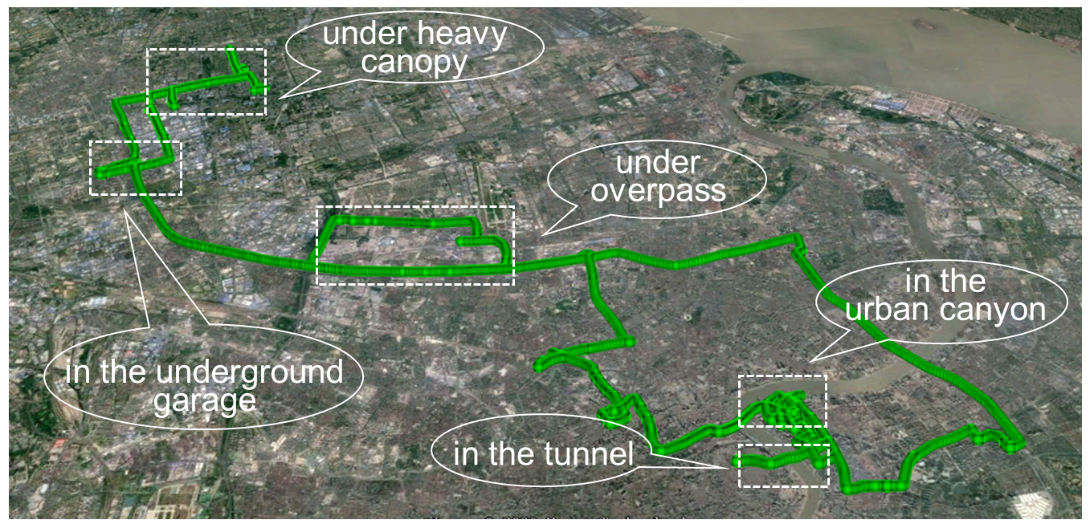
Figure 1 Itinéraire dynamique général monté sur véhicule
1.1 Performances dans Urban Canyon
La figure 2 montre la trajectoire de positionnement de tous les modules GNSS OEM dans le canyon urbain. Il a été constaté que tous les modules ont une bonne capacité de recherche de satellites dans le canyon groupé et avaient une ligne de trajectoire lisse adaptée à la route.
Alors que dans un canyon urbain regroupé avec plus d’obstacles, les performances de positionnement sont différentes. Les résultats montrent que le module de la série K8 est aussi performant que dans un canyon clairsemé. Le module M1 se décale légèrement en passant devant le grand bâtiment, bien qu’il soit toujours sur une trajectoire lisse. Le module M2 est avec quelques points de vol. Le module M3 décale évidemment et affiche une trajectoire non lissée, indiquant qu’il ne peut pas fournir de données de navigation précises dans un environnement en cluster.
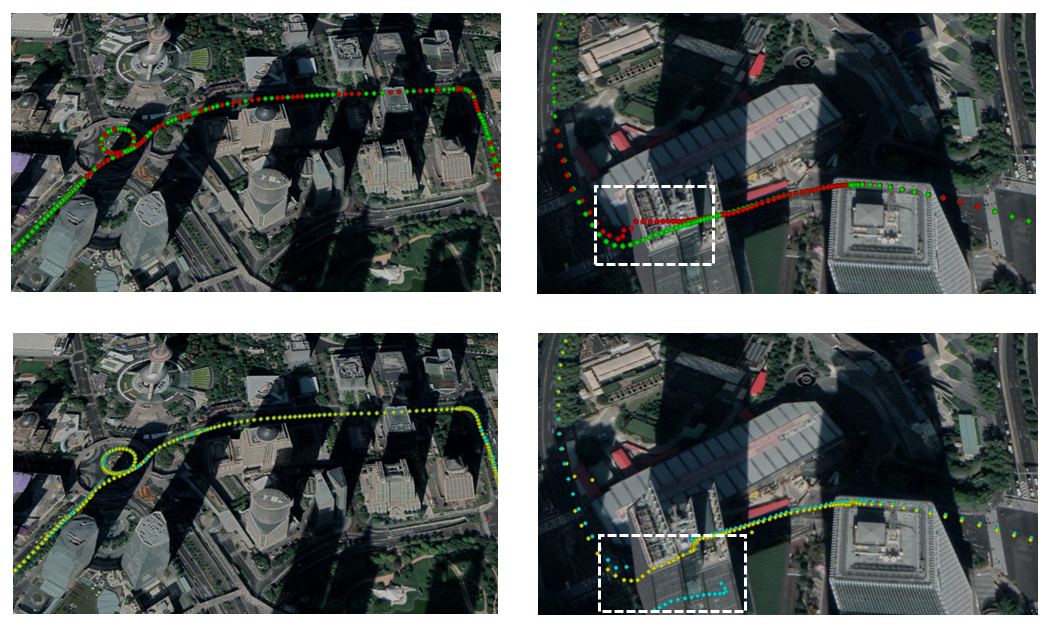
Figure 2 Suivi du positionnement dans un canyon urbain clairsemé (L) et dans un canyon urbain groupé (R)
Série K8 : vert ; M1 : rouge ; M2 : jaune ; M3 : bleu
1.1.2 Rendement dans les tunnels
Tunnel est l’un des environnements de test courants pour tester les performances de l’IMU à long terme. Dans cette scène, l’équipe de R&D a comparé les modules K8 et M1 car les modules M2 et M3 n’ont pas d’IMU à bord. La piste de positionnement est illustrée à la figure 3.
Le tunnel fait environ 0,5 kilomètre, soit environ 30 secondes de route. Le véhicule d’essai a traversé le tunnel d’avant en arrière, on suppose donc que la voie devrait être presque parallèle. Il est clair que la trajectoire des modules K8 est parallèle comme le montre la figure 3, ce qui est conforme à l’hypothèse. La trajectoire du module M1 se décale lorsque la voiture est au milieu du tunnel, ce qui montre que l’algorithme de navigation inertielle du module M1 dans ce test est imparfait.
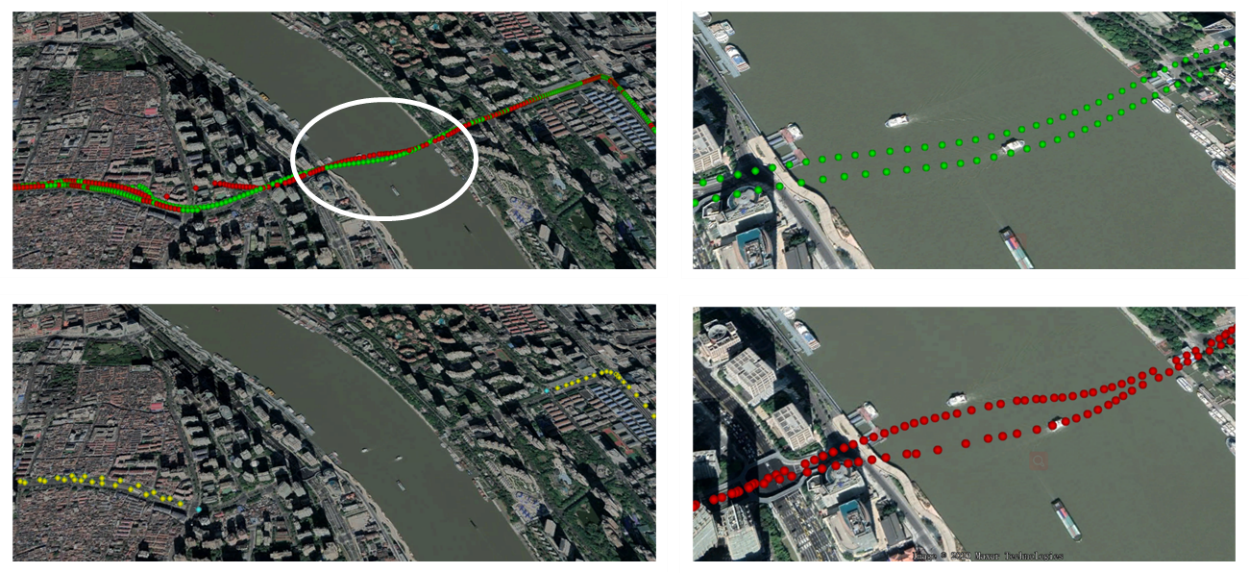
Figure 3 Positionnement global (L) et partiel (R) de la voie dans le tunnel
Série K8 : vert ; M1 : rouge ; M2 : jaune ; M3 : bleu
1.1.3 Rendement sous le viaduc
Le viaduc est un environnement typique à moitié abrité où les modules ne peuvent suivre que la moitié du nombre de satellites pendant une longue période par rapport à une scène à ciel ouvert. La trajectoire de positionnement sous le passage supérieur de tous les modules est donnée à la figure 4.
Comme le montre la figure 4, tous les modules fonctionnent bien, à l’exception du décalage occasionnel du module M2.

Figure 4 Positionnement de la voie sous le viaduc
Série K8 : vert ; M1 : rouge ; M2 : jaune ; M3 : bleu
1.1.4 Rendement sous un couvert lourd
Sous une canopée épaisse se trouve l’un des environnements typiques dépourvus de GNSS. Les résultats montrent que tous les modules fonctionnent bien et ont une trajectoire lisse, comme le montre la figure 5.
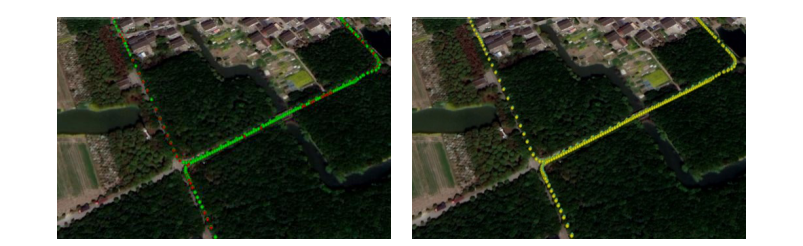
Figure 5 Positionnement de la voie sous un auvent lourd
Série K8 : vert ; M1 : rouge ; M2 : jaune ; M3 : bleu
1.1.5 Rendement dans un garage souterrain
L’équipe de R&D a également examiné les performances de l’IMU des modules K8 dans un garage souterrain, concernant le temps long et la faible vitesse. Il faut compter 3,5 minutes dans le garage souterrain. L’ensemble de la piste de positionnement est illustré à la figure 6. il est manifeste que l’IMU embarquée continue de fonctionner pendant plusieurs minutes en cas de perte de la navigation GNSS. De plus, la trajectoire des modules de la série K8 est plus fluide et plus fiable que celle de M1, ce qui indique que K8 a un algorithme de navigation inertielle plus puissant.

Figure 6 Positioning Track map in Underground Garage
K8 series: green; M1: red
1.2 Low-Speed Dynamic
A Testing elliptic orbit is designed with half side of orbit in open sky and the other under trees. The electric railcar runs with a stable speed, same height and same path on the orbit. The Figure 7 is the elliptic orbit.

Figure7 Railcar for Testing
Figure 8 demonstrates the horizontal and vertical positioning accuracy of all OEM modules. As is shown that all modules can obtain high quality positioning information while M2 modules loses positioning information when passing under the tree.
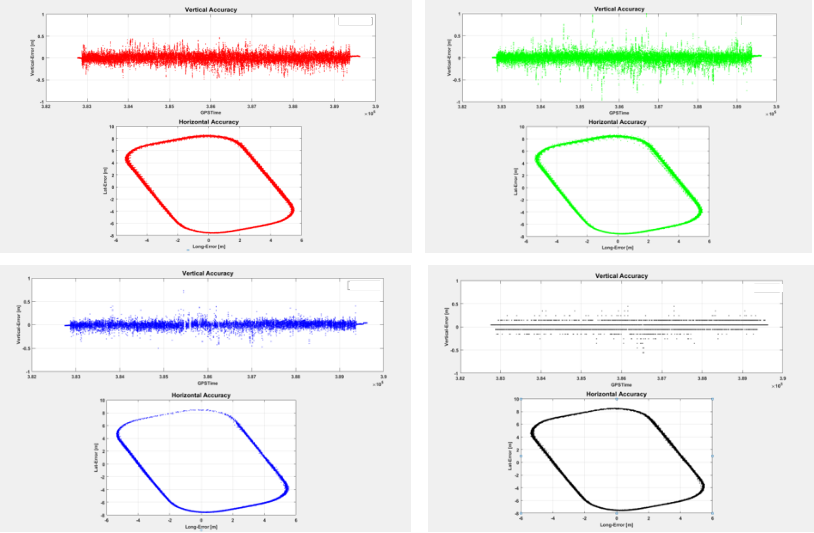
Figure 8 Précision de positionnement sur un wagon
Série K8 : rouge ; M1 : vert ; M2 : bleu ; M3 : noir
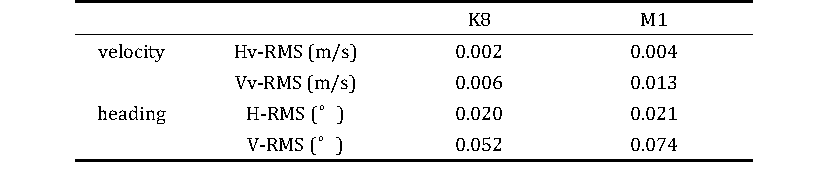
Les données de précision de la position sont présentées dans le tableau 1. Seuls les modules K8 et M1 sont analysés car ils prennent en charge l’en-tête d’un seul module. On constate que le K8 est plus performant à la fois en termes de précision de vitesse et de précision de cap que le module M1.
Tableau 1 : Précision de la vitesse (vitesse constante) et précision du cap (ligne de base de 3 m)
2. Test RTK statique
Dans le but de vérifier les performances géodésiques, en particulier pour la zone d’arpentage, l’équipe de R&D a également effectué un test de performance en condition statique dans différents environnements et différentes distances de base.
2.1 Rendement sous les arbres
Comme nous le savons tous, les arbres et les bâtiments sont les obstacles les plus courants dans les tâches d’arpentage. Par conséquent, l’équipe de R&D a examiné le RTK statique sous les arbres et dans les bâtiments du groupe respectivement. Les performances RTK de base de 8 km et 30 km de base de tous les modules OEM sont indiquées dans les tableaux 2 et 3.
Comme le montrent les tableaux 2 et 3, K8 a le taux fixe le plus élevé et le plus petit RMS, tant dans les lignes de base de 8 km que dans les 30 km, ce qui indique sa fiabilité et sa précision. De plus, le temps d’initialisation le plus court peut améliorer l’efficacité du travail d’arpentage. L’initialisation de M2 est presque deux fois plus longue et son taux fixe n’est que la moitié de celui de la série K8.
Tableau 2 : Performances RTK de base de 8 km (réinitialisation / 5 min)

Tableau 3 : Performances RTK de base de 30 km (réinitialisation / 5 min)

2.2 Performances dans Urban Canyon
La deuxième scène se déroule dans un canyon urbain, les performances RTK de base de 8 km et de base de 30 km de tous les modules OEM sont indiquées dans les tableaux 4 et 5.
Comme le montrent les tableaux 4 et 5, bien que tous les modules OEM fonctionnent bien, le module K8 présente toujours un petit avantage par rapport aux modules des deux autres fabricants.
Tableau 4 : Performances RTK de base de 8 km (réinitialisation / 5 min)
Tableau 5 : Performances RTK de base sur 30 km (réinitialisation / 5 min)

![]()
2.3 Rendement à ciel ouvert
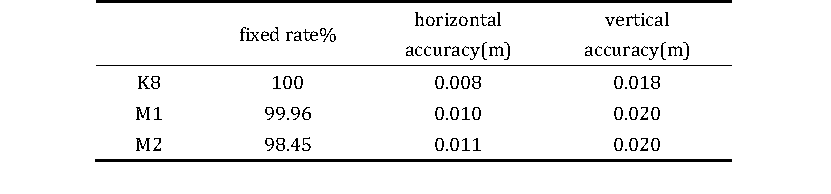
Compte tenu des obstacles courants, l’équipe de recherche et développement a également effectué un test de base long. Les performances RTK de tous les modules OEM à une ligne de base de 60 km sont indiquées dans le tableau 6. Le RTK de base de 60 km n’est pas recommandé dans les travaux d’arpentage réels et n’est ici que pour le test de performance.
Comme le montre le tableau 6, K8 a toujours un taux fixe de 100 % et une précision maximale, même dans une ligne de base de 60 km de long, bien que tous les modules OEM soient capables de traiter le RTK à longue base avec une grande précision et un taux fixe. La série K8 est la plus performante parmi tous les modules.
Tableau 6 : Performances RTK de base sur 60 km
Selon le test contrastif avec les modules OEM d’autres fabricants, les modules OEM GNSS de la série K8 surpassent les modules d’autres fabricants avec une précision, une fiabilité et un algorithme de navigation inertielle puissants. Il est évident que que ce soit dans le test RTK statique pour les applications d’arpentage traditionnelles, le test d’environnement à faible dynamique et sans signal pour les applications UAV et robotiques, ou le test de navigation dynamique monté sur véhicule pour les applications de conduite intelligente, les modules de la série K8 sont les meilleurs.
À propos de ComNav Technology
ComNav Technology développe et fabrique des cartes et des récepteurs GNSS OEM pour les applications de positionnement de haute précision. Sa technologie a déjà été utilisée dans un large éventail d’applications telles que l’arpentage, la construction, le contrôle des machines, l’agriculture, le transport intelligent, le chronométrage précis, la surveillance des déformations, les systèmes sans pilote. Avec une équipe dédiée à la technologie GNSS, ComNav Technology fait de son mieux pour fournir des produits fiables et compétitifs à des clients du monde entier. ComNav Technology a été cotée à la Bourse de Shanghai (Science and Technology Board), valeurs mobilières :ComNav Technology (Compass Navigation), Code boursier : 688592.
À propos de SinoGNSS®
SinoGNSS® est la marque officielle de ComNav Technology Ltd., déposée en République populaire de Chine, dans l’UE, aux États-Unis et au Canada. Toutes les autres marques sont la propriété de leurs propriétaires respectifs.