
Comment activer le système GNSS+INS sur les modules de la série K8
Le GNSS (Global Navigation Satellite System) est un système de positionnement par satellite qui fournit des informations de localisation et d’heure n’importe où sur ou près de la surface de la Terre. Des exemples de GNSS incluent GPS, GLONASS, Galileo et BeiDou.
L’INS (Inertial Navigation System), quant à lui, est un système de navigation autonome qui utilise des accéléromètres et des gyroscopes pour suivre le mouvement d’un objet. En mesurant les changements de vitesse et de direction, INS peut calculer la position et la trajectoire actuelles d’un objet. L’INS est particulièrement utile dans les zones où les signaux GNSS sont faibles ou indisponibles, comme sous terre ou sous l’eau.
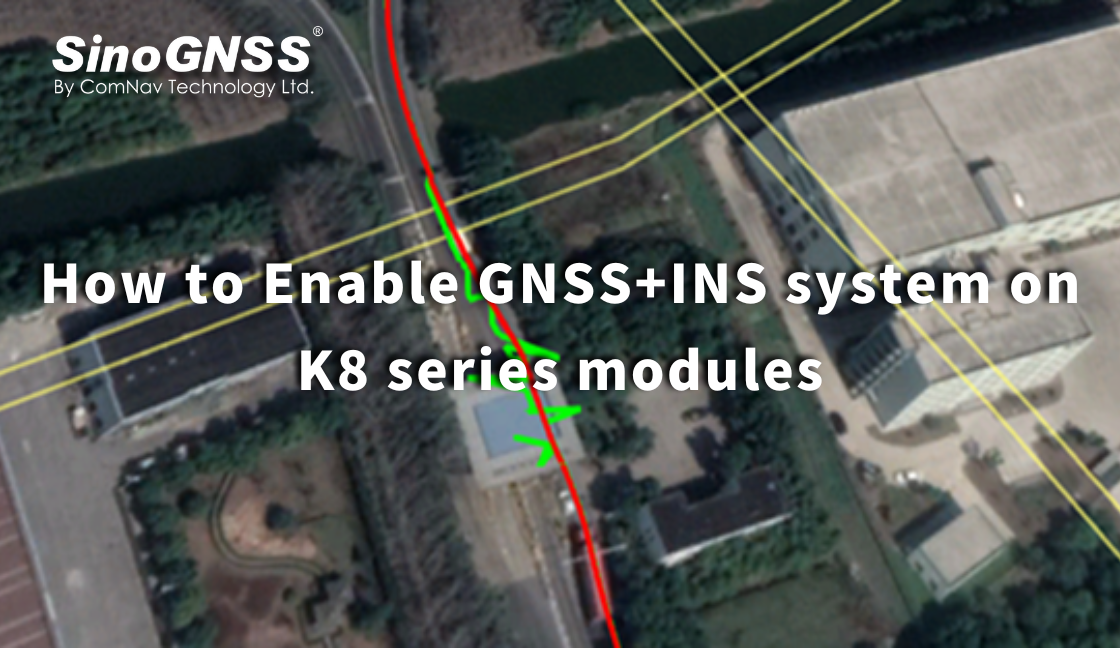
Dans de nombreux cas, le GNSS et l’INS sont utilisés ensemble pour fournir une solution de navigation plus précise et plus fiable. C’est ce qu’on appelle la navigation intégrée ou l’intégration GNSS/INS. La série ComNav K8 combine les forces des deux systèmes, la navigation intégrée peut être robuste dans des environnements difficiles et fournit un positionnement continu même pendant de courtes pannes GNSS, voici quelques exemples de performances K8 GNSS+INS dans différents environnements.
Vert : GNSS uniquement Rouge : GNSS+INS

Sous le viaduc

Passage à la station de métro

Dans le garage
 Installation et configuration
Installation et configuration
1) L’installation
Installez la planche sur le véhicule de la manière la plus rigide possible pour vous assurer que la planche et le véhicule ne bougeront pas l’un par rapport à l’autre pendant la conduite. L’appareil doit également être installé dans un endroit qui minimise l’impact des vibrations et des interférences électromagnétiques.
2) Configurer le mode INS
Après l’installation, vous pouvez activer l’option INS en tant que commandes
Inscontrol activer Activer Smootheddr saveconfig | activer le mode INS activer le mode lisse INS Enregistrer la configuration |
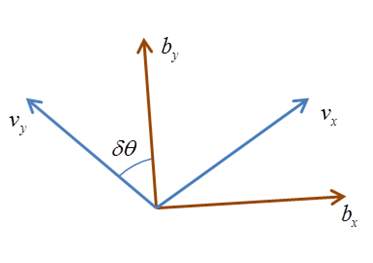
Il est recommandé que l’axe Y marqué sur le module soit maintenu sur la même ligne droite que la direction du corps porteur, c’est-à-dire que l’axe Y pointe vers la direction vers l’avant du véhicule. Pour différentes directions d’installation, vous pouvez vous référer au tableau ci-dessous pour configurer le type d’imuaxes, avec la commande ci-dessous.
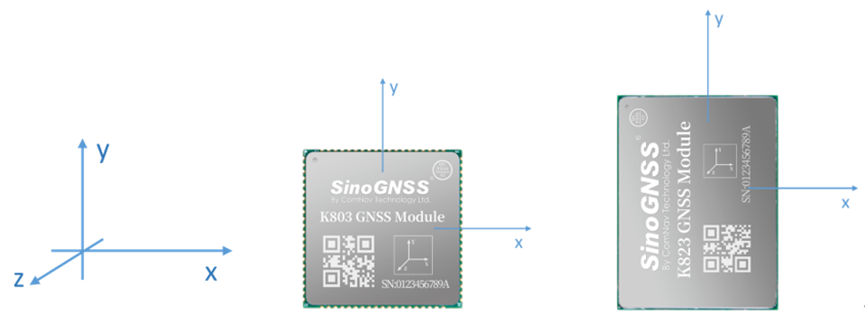
Système de coordonnées INS
Définir imuaxestype <axestype> saveconfig | Définir les axes du module OEM Enregistrer la configuration |
Type d’axe | Description |
1 | L’avant du module OEM est orienté vers le haut, l’axe y fait face à l’avant du véhicule. |
2 | L’axe 1 tourne de 90 degrés dans le sens inverse des aiguilles d’une montre horizontalement. |
3 | L’axe 1 tourne de 180 degrés dans le sens inverse des aiguilles d’une montre horizontalement. |
4 | L’axe 1 tourne de 270 degrés dans le sens inverse des aiguilles d’une montre horizontalement. |
5 | L’avant du module K8 est orienté vers le bas, l’axe y fait face à l’avant du véhicule. |
6 | L’axe 5 tourne de 90 degrés dans le sens inverse des aiguilles d’une montre horizontalement. |
7 | L’axe 5 tourne de 180 degrés dans le sens inverse des aiguilles d’une montre horizontalement. |
8 | L’axe 5 tourne de 270 degrés dans le sens inverse des aiguilles d’une montre horizontalement. |
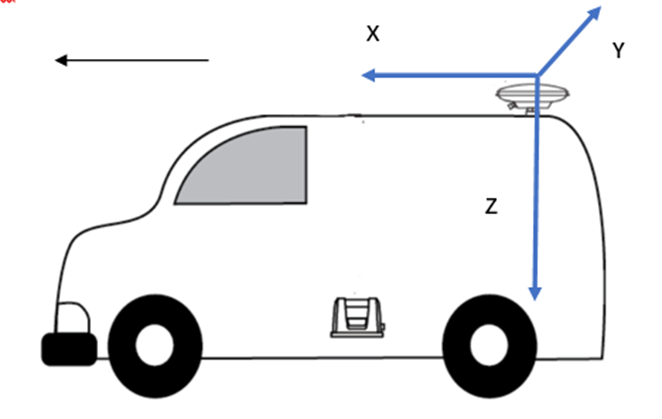
3) Configurer la valeur Drleverarm
Valeur de Drleverarm : le vecteur à trois axes du centre de phase de l’antenne au centre de phase INS.
set drleverarm X Y Z saveconfig | Définir la valeur du bras (-20 m ~ + 20 m) Enregistrer la configuration |
Remarque : Le XYZ n’est pas lié à l’axe de l’INS. X pointe vers l’avant du véhicule, Y pointe vers la droite du véhicule et Z pointe vers le bas.
4) Enregistrer la configuration INS
Une fois que vous aurez modifié la configuration INS ci-dessus, il faudra « reset » to board pour enregistrer la configuration INS.
Initialisation INS
Le système de navigation inertielle (INS) calcule le résultat de la navigation en intégrant la valeur de mesure du capteur inertiel, c’est-à-dire que chaque itération de l’équation de navigation doit utiliser les paramètres de navigation précédents tels que la position, la vitesse et l’attitude comme valeur initiale. Par conséquent, avant d’utiliser INS pour fournir des résultats de navigation, il doit être initialisé.
Méthode : Après avoir activé INS, il faudra d’abord obtenir une entrée de correction pour obtenir une solution fixe RTK, puis conduire le véhicule dans un environnement ouvert, et s’assurer que la vitesse atteint le seuil d’initialisation, et parcourir environ 10 m pour terminer l’initialisation.
Étalonnage INS
Afin de garantir les performances de l’INS, il doit être calibré une fois l’initialisation terminée pour éliminer l’erreur de placement de l’équipement INS.
Méthode : Maintenez une vitesse de 5 m/s dans un environnement ouvert et conduisez en ligne droite sur au moins 200 m, tournez à 90 ° ; pour la gauche et la droite deux fois pour chacun (avec un bon environnement routier, vous pouvez faire demi-tour en figure 8).
L’état de l’étalonnage peut être vérifié par le message « sysrts ». Après étalonnage, l’état de l’INS sera « 3 ».
Systèmes de journaux | vérifier l’état INS |
Voici un exemple de sortie du message SYSRTS :
$SYSRTS,466724.10,093826.10,48,5,,AT,41,78,1,1,49,,,,,,,,,M,AIR,0,,42.5,3,9,2200,0,0*3A
Il existe au total 4 types de statuts différents pour l’INS, comme le tableau ci-dessous l’énumère :
Statut INS | INS activé | INS initialisé | Étalonné INS |
0 | û | ||
1 | ü ; | ||
2 | ü ; | ü ; | |
3 | ü ; | ü ; | ü ; |
Message de positionnement et de cap
Demander un message de positionnement et de cap avec un message GPGGA et un message GPTRA.
log gpgga ontime 0.2 Log GPTRA à l’heure 0,2 | Message de positionnement Message d’en-tête |
Dans le message GPGGA, l’état de la solution pour GNSS+INS est « 6 » ; Dans le message GPTRA, l’état de la solution pour GNSS+INS est « 6 ».
Exemple de message GPGGA
$GPGGA,024941,00,3110.4693903,N,12123.2621695,E,6,16,0.6,57.0924,M,0.000,M,99,AAAA*55
Champ# | Structure | Description | Symbole | Exemple |
1 | $GPGGA | En-tête de journal | $GPGGA | |
2 | Utc | Heure UTC de la position (heures/minutes/secondes/secondes décimales) | hhmmss.ss | 202134.00 |
3 | années | Latitude (DDmm.mm) | llll.llllllll | 3110.4693903 |
4 | latdir | Direction de la latitude (N = Nord, S = Sud) | un | N |
5 | lon | Longitude (DDDmm.mm) | yyyyy.yyyyyyyy | 121232621695 |
6 | londir | Direction de la longitude (E = Est, W = Ouest) | un | Dans |
7 | GPS qui | Indicateur de qualité GPS 0 = correctif non disponible ou non valide 1 = GPS fix 2 = SBAS, GPS différentiel C/A, OmniSTAR HP, OmniSTAR XP, OmniSTAR VBS ou CDGPS 4 = Solution d’ambiguïté fixe RTK (RT2) 5 = Solution d’ambiguïté flottante RTK (RT20), OmniSTAR HP ou OmniSTAR XP 6 = Mode à l’estime (GNSS+INS) 7 = Mode de saisie manuelle (position fixe) 15 = PPP | x | 1 |
Exemple de message GPTRA
$GPTRA,063027,30,101,78,071,19,-00,00,6,10,00,00,0004*51
Champ# | Structure | Description | Symbole | Exemple |
1 | $GPTRA | En-tête de journal | $GPTRA | |
2 | Utc | UTC de la position | hhmmss.ss | 063027.30 |
3 | rubrique | 0 ~ 360 degrés | hhh.hh | 101.78 |
4 | tanguer | -90 ~ 90 degrés | ppp.pp | 071.19 |
5 | rouler | [Réservé] | rrr.rr | -00.00 |
6 | État du sol | indicateur de solution 0 = correctif non disponible ou non valide 1 = Position en un seul point 2 = SBAS, GPS différentiel C/A, OmniSTAR HP, OmniSTAR XP, OmniSTAR VBS ou CDGPS 4 = Solution d’ambiguïté fixe RTK (RT2) 5 = Solution d’ambiguïté flottante RTK (RT20), OmniSTAR HP ou OmniSTAR XP 6 = Mode à l’estime (GNSS+INS) | Je | 4 |
À propos de ComNav Technology
ComNav Technology développe et fabrique des cartes et des récepteurs GNSS OEM pour les applications de positionnement de haute précision. Sa technologie a déjà été utilisée dans un large éventail d’applications telles que l’arpentage, la construction, le contrôle des machines, l’agriculture, le transport intelligent, le chronométrage précis, la surveillance des déformations, les systèmes sans pilote. Avec une équipe dédiée à la technologie GNSS, ComNav Technology fait de son mieux pour fournir des produits fiables et compétitifs à des clients du monde entier. ComNav Technology a été cotée à la Bourse de Shanghai (Science and Technology Board), valeurs mobilières :ComNav Technology (Compass Navigation), Code boursier : 688592.
À propos de SinoGNSS®
SinoGNSS® est la marque officielle de ComNav Technology Ltd., déposée en République populaire de Chine, dans l’UE, aux États-Unis et au Canada. Toutes les autres marques sont la propriété de leurs propriétaires respectifs.