
Principe et performance du SRV de CDC.NET+CORS
 1 Brève introduction des principes du CORS, du RTK réseau et du SRV
1 Brève introduction des principes du CORS, du RTK réseau et du SRV
Les CORS, également connues sous le nom de stations de référence fonctionnant en continu, sont une ou plusieurs stations de référence GNSS fixes et fonctionnant en continu, avec la combinaison d’ordinateurs, de communications de données et de technologies Internet (LAN/WAN) pour répondre automatiquement aux besoins multiples des utilisateurs avec différents types d’observations GNSS (phase porteuse, pseudo-portée), diverses corrections, état et autres systèmes de service GNSS en temps réel.
Le RTK du réseau GNSS, également connu sous le nom de RTK de station multi-référence, est une méthode de positionnement qui permet d’établir plusieurs stations de référence GNSS (généralement trois ou plus) dans une zone pour former une couverture maillée, de calculer et de diffuser les informations de correction GNSS sur la base d’une ou de plusieurs de ces stations de référence et d’effectuer des corrections en temps réel aux utilisateurs GNSS dans cette zone.
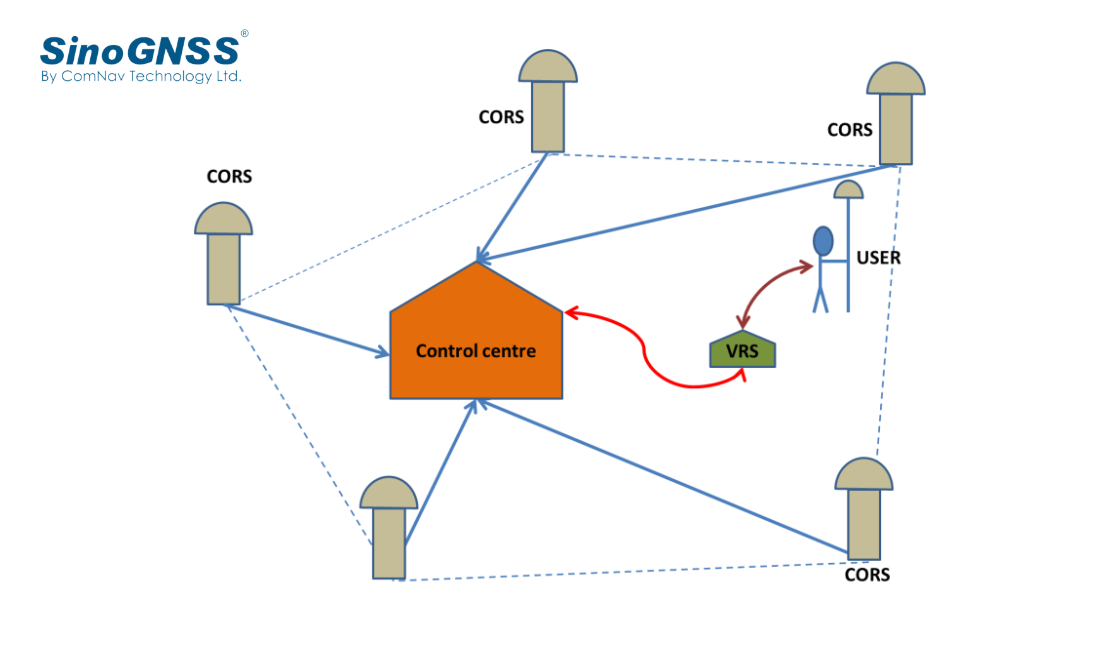
Station de référence virtuelle. désigne un certain nombre (au moins trois) de stations de référence installées dans une zone pour recevoir les signaux du satellite et transmettre les informations au centre de traitement de l’information. Le rover envoie les informations de localisation du récepteur au centre de traitement des données, et le centre de traitement des données sélectionnera les informations de plusieurs stations de référence à proximité pour créer « virtuellement » une station de référence basée sur l’emplacement de la station mobile, puis diffuser les données corrigées de la station de référence virtuelle à la station mobile. La position de cette station de référence virtuelle se situe généralement à moins de 5 kilomètres autour de la station mobile, mais en fait, elle se trouve généralement à quelques mètres. L’erreur des données obtenues grâce à cette technologie est considérablement réduite.
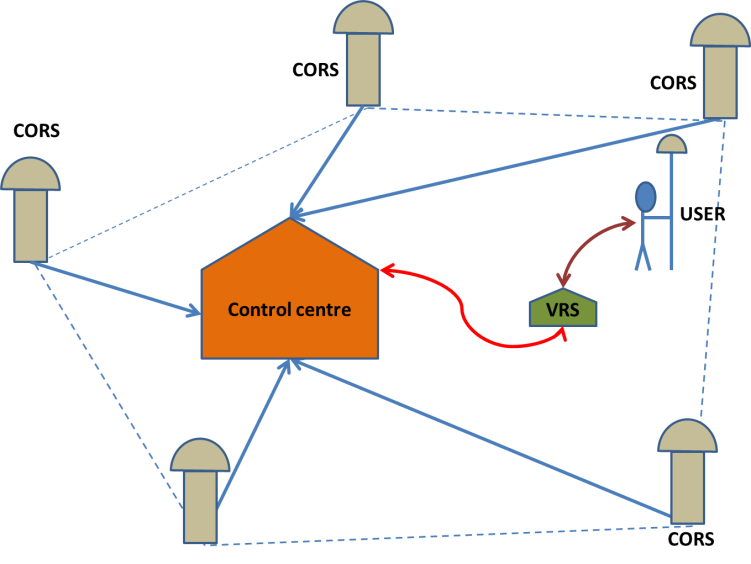
Graphique 1. Schéma de principe de fonctionnement du SRV
2 Comparaison et analyse de plusieurs technologies RTK réseau
VRS | FKP | MAC | CBI | |
Modèle mathématique de base | Modèle d’interpolation du modèle d’observation à double différence | Filtrage de Kalman du modèle d’observation de non-différence de l’ensemble du réseau Solution globale | Modèle d’observation à double différence / modèle compatible | Modèle d’interpolation du modèle d’observation à double différence |
Spatial error model | On the server side | On the mobile user side | On the mobile user side | On the server side |
Reference station participating in the calculation | Need to select a master reference station, and all reference stations in the network participate in the positioning calculation | Do not select the main reference station, take the three closest reference stations to the rover | Need to select a master station, but it is not required to use the base station closest to the user as the master station | Flexible selection of the reference station according to the relative position of the rover and the reference station |
Communication mode | Two-way communication | One-way communication | Two-way and one-way communication | One-way communication |
GPSNet of Trimble | SAPOS network of Germany | Spider of Leica | PowerNet of Wuhan University |
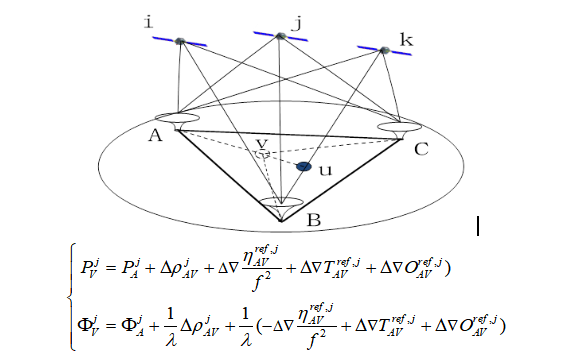
3 VRS Fundamental
The first is the fixation of the long baseline ambiguity of the base station. How to achieve fast and accurate fixation of the long baseline ambiguity is a key factor that affects the initialization time and availability of the system.
The second is the accurate modeling of regional spatial atmospheric errors. The modeling accuracy of atmospheric errors directly affects the positioning accuracy of users.
Real-time transmission, encoding and decoding of data in different formats
Data quality control, processing of related errors such as cycle slip, clock slip, and multipath;
Concurrent processing when large-capacity users access;
1) Fixing the ambiguity of the baseline
a) Wide lane ambiguity

b) Deionospheric combination

c) L1 ambiguity and zenith tropospheric delay RZTD (tropospheric effect is negligible for short baselines and does not need to be estimated, but needs to be estimated for long baselines)

2) Calculation of baseline atmospheric error delay
a) Calculation of double-difference ionospheric delay


b) Calculation of double-difference tropospheric delay

3) Linear interpolation of tropospheric and ionospheric delays at virtual reference stations
4) Comprehensive Correction Number Generation of Virtual Reference Station
a) Comprehensive correction parameters:

b) Non-difference observations:
4 Performance of CDC.NET + M300pro
The CDC.NET software is deployed on a physical server, with the environment configured to:
Item | Server configuration |
Unit type | 10SMCTO1WW |
Equipment characteristic | Intel(R)Core(TM)i5-8500CPU@3.00GHz,8GMemory installed |
OS | Windows10 64bit(10.0, version17763) |
Data base | MySQL5.5 |
Software version | CDC.NET 1.8.2 |
Les résultats du test :
Article | Performance |
Temps d’initialisation du système | Moins de 2 minutes |
Temps d’initialisation du rover | Moins de 30 secondes |
Précision de la coïncidence intérieure | Horizontal 1,4 cm et vertical 2,3 cm |
Précision de la coïncidence extérieure | Horizontal 1,9cm et vertical 2,6 cm |
Nombre de points d’accès à la station de base | Le numéro d’accès à la station de référence est 220, et le programme est toujours stable |
Utilisateurs en ligne simultanés | Le mode Grille peut atteindre une capacité maximale de plus de 10 000 utilisateurs |
Stabilité du système | Les 100 bases et les 500 Rovers peuvent fonctionner de manière stable pendant plus de 30 jours |
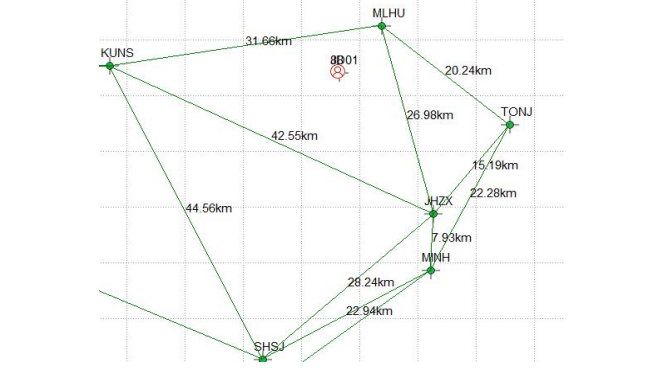
Deux cartes K708 (les deux firmwares sont 399A5) connectées à la même antenne sont connectées aux services VRS pour CDC.NET 1.8.2 et NEAREST pour CDC+, respectivement, afin de comparer la précision de positionnement. La station de base sélectionnée pour connecter le service CDC + station de base unique est MLHU (8 km du rover), le réseau de stations connecté au service VRS est illustré dans la figure ci-dessous, l’élément net est KUNS-JHZX-MLHU, la station de référence principale est MLHU et la distance entre la station de référence principale et le rover est de 8 km.
Comparaison des positions VRS et SRTK
Mode de positionnement | RMS horizontale (m) | RMS vertical (m) | Portée horizontale (m) | Taux de dépassement des erreurs | Taux fixe |
VRS | 0.0073269 | 0.01224 | 0.04 | 0.86% | 100% |
LE PLUS PROCHE | 0.0061154 | 0.01021 | 0.03 | 0.45% | 100% |
Le nombre de satellites calculé par les deux modes est le même, la précision de positionnement horizontal et vertical du VRS est légèrement inférieure à celle du SRTK, le taux de dépassement d’erreur était également supérieur à celui du SRTK, une optimisation supplémentaire est encore nécessaire.
Grâce à des tests et à des vérifications réels, la précision de positionnement RTK du réseau CDC.NET est de l’ordre de 80 km de côté et peut atteindre une précision de positionnement de 2 cm horizontalement et 3 cm verticalement dans le réseau, ce qui est meilleur que la précision de positionnement horizontale de 10 cm + D×10-6 et verticale de 10 cm + D×10-6 requise par la conception du système. Et la continuité du positionnement du système, la convivialité, l’initialisation, le temps fixe et d’autres indicateurs répondent tous aux indicateurs de performance de positionnement RTK, qui sont au plus haut niveau de l’industrie.
Notes:
1. Certaines photos de l’article sont tirées d’Internet, si vous avez des questions, veuillez nous contacter à temps.
À propos de ComNav Technology
ComNav Technology développe et fabrique des cartes et des récepteurs GNSS OEM pour les applications de positionnement de haute précision. Sa technologie a déjà été utilisée dans un large éventail d’applications telles que l’arpentage, la construction, le contrôle des machines, l’agriculture, le transport intelligent, le chronométrage précis, la surveillance des déformations, les systèmes sans pilote. Avec une équipe dédiée à la technologie GNSS, ComNav Technology fait de son mieux pour fournir des produits fiables et compétitifs à des clients du monde entier. ComNav Technology a été cotée à la Bourse de Shanghai (Science and Technology Board), valeurs mobilières :ComNav Technology (Compass Navigation), Code boursier : 688592.
À propos de SinoGNSS®
SinoGNSS® est la marque officielle de ComNav Technology Ltd., déposée en République populaire de Chine, dans l’UE, aux États-Unis et au Canada. Toutes les autres marques sont la propriété de leurs propriétaires respectifs.