Service B2b Beidou et technologie B2b-PPP
PPP-B2b, le premier système de navigation par satellite (BDS) à signal de haute précision de Beidou, est diffusé par trois satellites en orbite géosynchrone (GEO) Beidou pour fournir aux utilisateurs des services de haute précision ouverts et gratuits. ComNav Technology mène des recherches liées au signal PPP-B2b et applique la technologie PPP-B2b et l’algorithme de positionnement ponctuel de précision (PPP) en temps réel à des produits de haute précision, obtenant un positionnement de haute précision en temps réel sans dépendre des réseaux de communication. Ceci est d’une grande importance pour les applications de haute précision dans la recherche scientifique, l’arpentage et la cartographie, le développement marin, l’agriculture et d’autres domaines.
 1 Introduction au PPP-B2b
1 Introduction au PPP-B2b
Le système mondial de navigation par satellite Beidou (BDS-3), troisième étape de la construction et du développement du système Beidou, comprend 30 satellites, dont 3 satellites en orbite géosynchrone (GEO), 3 satellites en orbite géosynchrone inclinée (IGSO) et 24 satellites en orbite terrestre moyenne (MEO). Le système mondial Beidou peut non seulement fournir aux utilisateurs mondiaux des services de positionnement et de navigation, de synchronisation et de recherche et de sauvetage internationaux, mais aussi des services de communication régionaux, y compris SBAS, GBAS, PPP et des messages courts régionaux pour les utilisateurs de la région Asie-Pacifique.
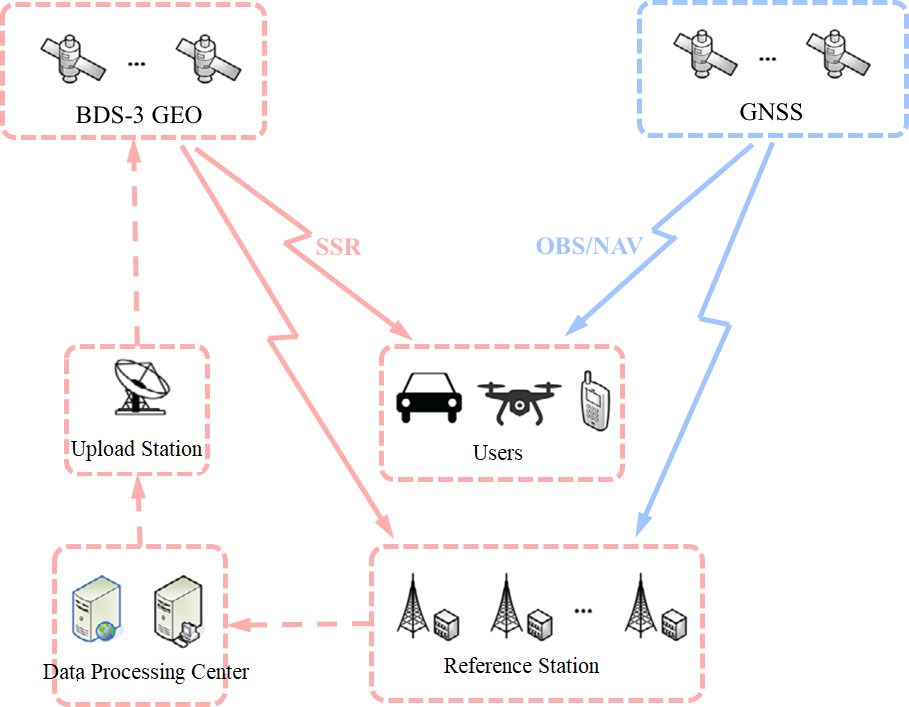
Figure 1 Système de service PPP BDS-3
Le système de service PPP BDS-3 (voir figure 1), basé sur le signal PPP-B2b comme canal de diffusion de données de correction telles que le décalage d’orbite et d’horloge du système mondial Beidou et d’autres systèmes mondiaux de navigation par satellite dans la région Asie-Pacifique, fournit aux utilisateurs des services de haute précision ouverts et gratuits. Tout d’abord, la station de référence génère des informations de pseudo-distance et d’observation de porteuse et collecte des données météorologiques après surveillance continue de tous les satellites visibles, puis envoie les données brutes au centre de traitement des données via le réseau après prétraitement. Deuxièmement, le centre de traitement des données vérifie et évalue les données brutes, puis calcule l’erreur d’orbite du satellite et l’erreur d’horloge pour générer des données de correction et d’autres informations d’amélioration pertinentes selon les protocoles, transmises aux satellites GEO par station de téléchargement. Enfin, les satellites GEO diffuseront le signal PPP-B2b et le PPP en temps réel pourra être effectué après que l’utilisateur aura reçu les informations de correction.
2 Structure du signal PPP-B2b
The basic frame structure of the PPP-B2b signal message data is demonstrated in Figure 2. Each message data frame is composed of 486 bits. Among them, the highest 6 bits indicate the message type, the lowest 24 bits are the cyclic redundancy check bit (CRC), and the middle 456 bits are the data field. The specific contents are determined by their corresponding message types. Each type of message data also defines its own layout standard to facilitate decoding and use.
After 64-ary LDPC (162, 81) encoding, the frame length shall be 972 symbols. These symbols will be concatenated together with 16 symbols of the preamble, 6 symbols of the PRN and 6 symbols of the reserved flags to form 1000 symbols in total.
The defined message types are shown in Table 1. However, currently only the first four message types are actually broadcast and are only for BDS-3 and GPS satellites. In order to ensure the correlation between the information content that broadcast by different message types, as well as the correlation between the correction message and the broadcast ephemeris, the messages are identified by four version numbers of IOD SSR, IODP, IODN and IOD Corr, for easy matching and use.
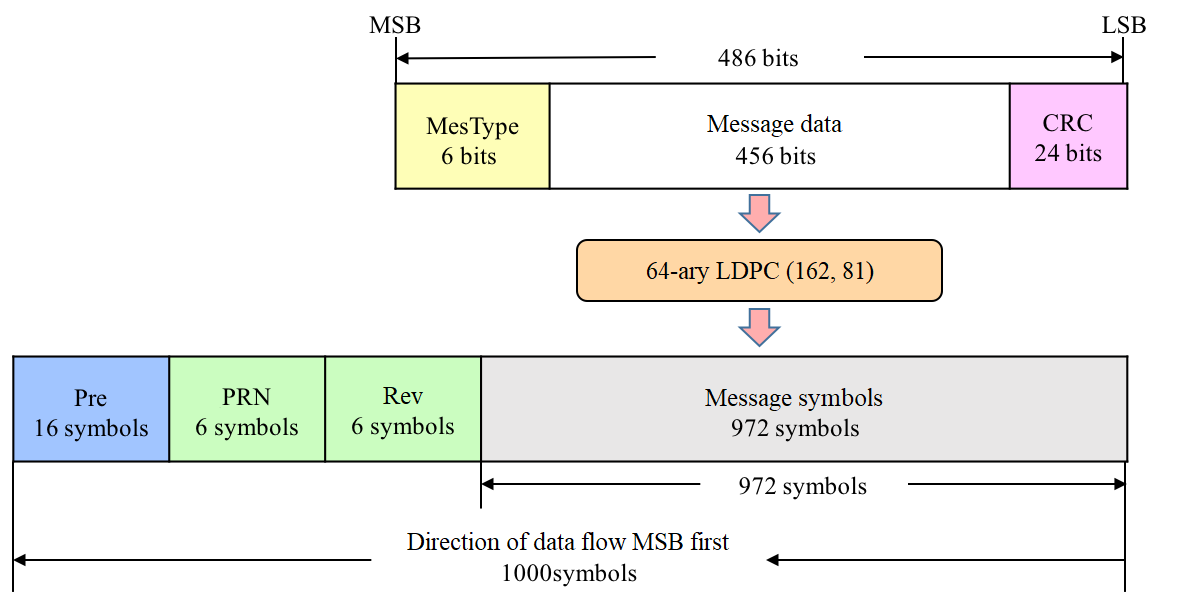
Figure 2 The PPP-B2b navigation message frame structure
Table 1 PPP-B2b defined message types
Message types | Information content |
1 | Satellite mask |
2 | Satellite orbit correction and user range accuracy |
3 | Differential code bias |
4 | Satellite clock correction |
5 | User range accuracy |
6 | Clock correction and orbit correction – combination 1 |
7 | Clock correction and orbit correction – combination 2 |
8-62 | Reserved |
63 | Null message |
The defined message types are shown in Table 1. However, currently only the first four message types are actually broadcast and are only for BDS-3 and GPS satellites. In order to ensure the correlation between the information content that broadcast by different message types, as well as the correlation between the correction message and the broadcast ephemeris, the messages are identified by four version numbers of IOD SSR, IODP, IODN and IOD Corr, for easy matching and use.
3 PPP-B2b Technology Rearch and Development
SinoGNSS K8-series support PPP-B2b signal that with a center frequency of 1207.14MHz and a bandwidth of 20.46MHz. Based on this hardware support, ComNav Technology R&D team realized Precise Point Positioning on K8-EVK via the PPP-B2b service.
3.1 Theorical Basis3.1.1 PPP (Precise Point Positioning) TechnologyThe PPP (Precise Point Positioning) technology means after correcting each error by the use of precise satellite orbit and clock messages, achieving high-accuracy positioning results via the corrected observation data of single GNSS receiver.During the Precise Point Positioning, each error in the GNSS measurement needs to be accurately corrected. The main error sources in GNSS measurement and the corresponding correction methods are listed in Table 2.
Table 2: Main error source in GNSS measurement
Errors | Correction method |
Satellite clock errors | Clock correction (PPP-B2b) |
Satellite orbit errors | Orbit correction (PPP-B2b) |
Satellite hardware delay | Pseudo-range: TGD/DCB |
Satellite antenna phase center offset | Model correction |
Ionospheric delays | Ionosphere-free combination |
Tropospheric delays | Model correction + Parameter estimation |
Earth rotation effect | Model correction |
Relativity theory effect | Model correction |
Tide influence | Model correction |
Receiver clock errors | Parameter estimation |
Receiver hardware delay | (Included in receiver clock errors) |
Integer ambiguity | Parameter estimation |
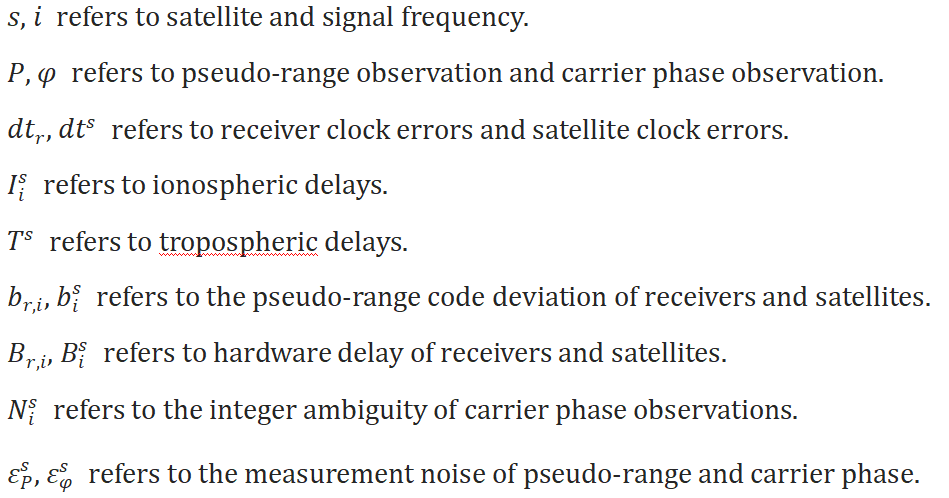
In PPP, the pseudo-range and carrier phase observations are mainly adopted. According to the geometry and error sources of GNSS positioning, the observation equation can be expressed as below,

3.1.2 Satellite Orbit Correction
In PPP-B2b signal corrections, the epoch time interval of orbit corrections in message 2 is 48 seconds. The broadcasted orbit correction information includes the components of the orbit correction vector  in the radial, tangential and normal directions. The satellite position correction vector
in the radial, tangential and normal directions. The satellite position correction vector  can be calculated via orbit corrections. When the IODN of orbit correction message matches the IODE of navigation messages, the satellite position vector
can be calculated via orbit corrections. When the IODN of orbit correction message matches the IODE of navigation messages, the satellite position vector  calculated from broadcast ephemeris can be corrected, the correction formula is as below,
calculated from broadcast ephemeris can be corrected, the correction formula is as below,

The calculation formula of satellite position correction vector is as below,
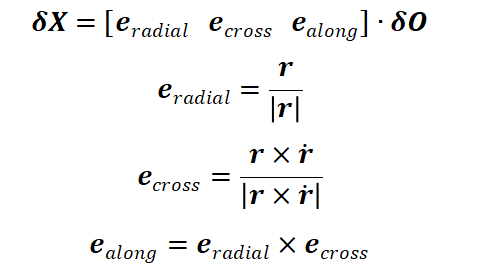
Dans la formule,  se réfère à la position du satellite et au vecteur vitesse dans les éphémérides de diffusion,
se réfère à la position du satellite et au vecteur vitesse dans les éphémérides de diffusion,  correspond aux vecteurs unitaires dans les directions radiale, tangentielle et normale.
correspond aux vecteurs unitaires dans les directions radiale, tangentielle et normale.
3.1.3 Correction de l’horloge satellite
L’intervalle de temps d’époque des corrections d’horloge dans le message PPP-B2b 4 est de 6 secondes. Une fois que le message de correction d’horloge correspond avec succès aux éphémérides de diffusion, l’erreur  d’horloge calculée à partir des éphémérides de diffusion peut être corrigée par le message
d’horloge calculée à partir des éphémérides de diffusion peut être corrigée par le message  de correction d’horloge, la formule est comme ci-dessous,
de correction d’horloge, la formule est comme ci-dessous,

Lorsque les identificateurs IOD Corr du message 2 et du message 4 sont identiques et que l’IODN des messages 2 et 4 peut correspondre à l’IODE des messages de navigation, la correction d’orbite et les corrections d’horloge peuvent être utilisées ensemble pour corriger les erreurs.
3.2 Mise en œuvre de l’algorithmeLe diagramme de l’algorithme PPP basé sur le service PPP-B2b est illustré à la figure 3, qui se compose principalement de 5 étapes.
1) Saisie des données. Outre les données d’observation GNSS de base et les éphémérides de diffusion, les messages PPP-B2b sont également requis.
2) Prétraitement des données. Acquérir les données de correction détaillées en décodant les messages PPP-B2b. Et il est nécessaire de faire correspondre les identificateurs des différents messages pour s’assurer que les données de correction peuvent être utilisées pour une correction précise et efficace, y compris la correspondance des messages de navigation et des données de correction, et la correspondance de différents types de données de correction.
3) Traitement des données. Cette étape consiste à traiter diverses erreurs dans les données GNSS. L’erreur d’orbite du satellite et l’erreur d’horloge du satellite peuvent être corrigées par les données de correction fournies par les messages PPP-B2b. Le retard ionosphérique peut être éliminé par une combinaison sans ionosphère. Et certaines erreurs peuvent être corrigées par des modèles standard. Le rejet d’erreur grossière et la détection des glissements de cycle sont également nécessaires. Après correction et traitement ci-dessus, la position précise du satellite, la pseudo-portée et la phase de la porteuse sont obtenues.
4) Estimation des paramètres. Estimez les paramètres inconnus en fonction du filtrage de Kalman, y compris les coordonnées de la station et certaines erreurs non corrigées à l’étape précédente, telles que l’erreur d’horloge du récepteur, l’ambiguïté des entiers et le retard troposphérique.
5) Résultat de sortie. Après traitement, il peut produire des résultats PPP comprenant les coordonnées de la station, la précision du positionnement, le DOP, le RMS et d’autres informations.
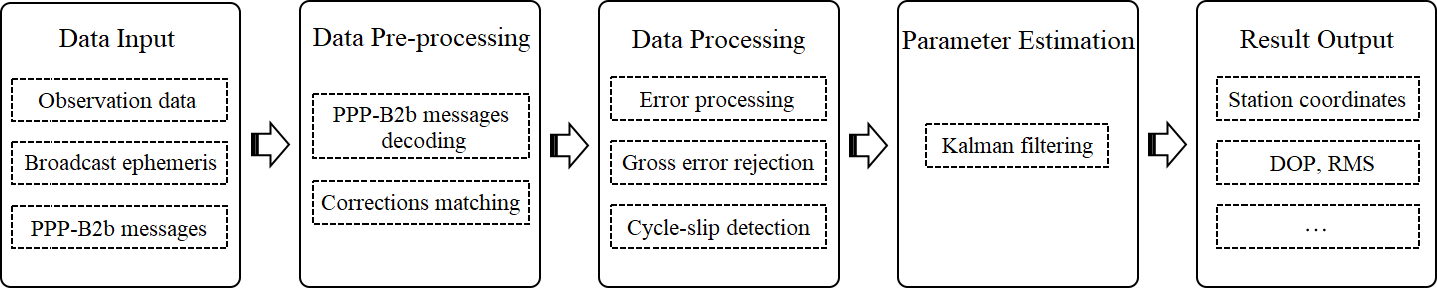
Figure 3 Diagramme de l’algorithme PPP basé sur le service PPP-B2b
The R&D team of ComNav Technology conducted a 10hrs dynamic test of above algorithm on K8-EVK and the positioning results are shown in Figure 4 and Table 3. The PPP accuracy achieves 6cm horizontally and 8cm vertically after 13 minutes of convergence, which can satisfy most high precision positioning requirements.

Figure 4 Précision PPP de K8-EVK
Tableau 3 : Résultat du positionnement
Précision horizontale | RMS:0.0603m |
95 % : 0,0993 million | |
Précision verticale | RMS:0.0849m |
95 % : 0,1979 million | |
Temps de convergence horizontale | 705 s/10 cm |
Temps de convergence verticale | 765 s/20 cm |
Nombre d’échantillons | 36001 époques, 1Hz |
4 Les avantages du service PPP-B2b
Les avantages de la technologie de positionnement ponctuel de précision en temps réel basée sur les services PPP-B2b se reflètent sous trois aspects :
Par rapport au PPP commercial traditionnel, il est ouvert et gratuit ;
Il peut fournir un service de positionnement de précision décimétrique étendue dans la plage de desserte, sans être limité par des facteurs tels que la distance de la station de base, l’intégrité et la qualité des données différentielles. Cela signifie qu’une partie des opérations RTK sera remplacée.
L’algorithme PPP-b2b est réalisé en recevant les données de télégramme diffusées par les satellites mondiaux Beidou au lieu de compter sur le réseau pour recevoir activement d’autres informations externes, ce qui rend le processus de positionnement plus stable et plus fiable.
Du point de vue de l’application, la technologie de positionnement ponctuel de précision basée sur PPP-B2b peut fournir aux utilisateurs des services de haute précision dans les environnements où le RTK est instable ou non couvert. En attendant, il peut résoudre les problèmes dans des zones telles que le désert de Gobi, les mines et les mers où le service CORS ne peut pas être couvert et où la station de base est difficile à mettre en place.
À l’heure actuelle, le module de positionnement de haute précision K803 et K803S et le kit d’évaluation de K803_EVK ont pris en charge le service de haute précision PPP-B2b. Ce service sera mis en œuvre sur des modules de haute précision tels que les modules K802 et K823 par la suite afin que les utilisateurs puissent facilement obtenir et utiliser la fonction PPP-B2b après avoir intégré directement les modules.
Note:
À l’heure actuelle, la couverture du signal PPP-B2b de BeiDou n’inclut que la région Asie-Pacifique.
À propos de ComNav Technology
ComNav Technology développe et fabrique des cartes et des récepteurs GNSS OEM pour les applications de positionnement de haute précision. Sa technologie a déjà été utilisée dans un large éventail d’applications telles que l’arpentage, la construction, le contrôle des machines, l’agriculture, le transport intelligent, le chronométrage précis, la surveillance des déformations, les systèmes sans pilote. Avec une équipe dédiée à la technologie GNSS, ComNav Technology fait de son mieux pour fournir des produits fiables et compétitifs à des clients du monde entier. ComNav Technology a été cotée à la Bourse de Shanghai (Science and Technology Board), valeurs mobilières :ComNav Technology (Compass Navigation), Code boursier : 688592.
À propos de SinoGNSS®
SinoGNSS® est la marque officielle de ComNav Technology Ltd., déposée en République populaire de Chine, dans l’UE, aux États-Unis et au Canada. Toutes les autres marques sont la propriété de leurs propriétaires respectifs.