K803 Lite (L1) Module GNSS DP-filter Rapport de test de fonctionnement lisse
ComNav Technology a effectué un test simple sur la fonction de lissage du filtre DP du module K803 Lite (L1). Ce rapport présente les performances de positionnement en douceur du filtre DP du K803 Lite (L1) sur la base théorique et les résultats des tests, dans le but d’aider les utilisateurs à avoir une connaissance claire du fonctionnement en douceur du filtre DP et des applications associées.
 1 Base théorique
1 Base théorique
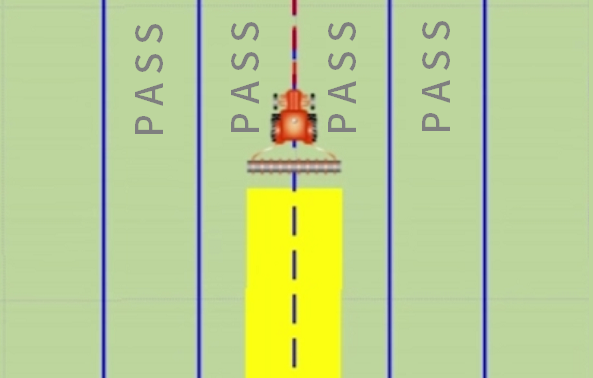
Fig. 1 Passe à passe
l’aide de l’algorithme de lissage du filtre DP, la précision relative du K803 Lite (L1) entre 2 époques consécutives est de 1 cm en mode de positionnement en un seul point. Pour des périodes plus longues comme 15-30 min, la précision d’une passe à l’autre peut être maintenue à moins de 15 cm dans 95 % des cas.
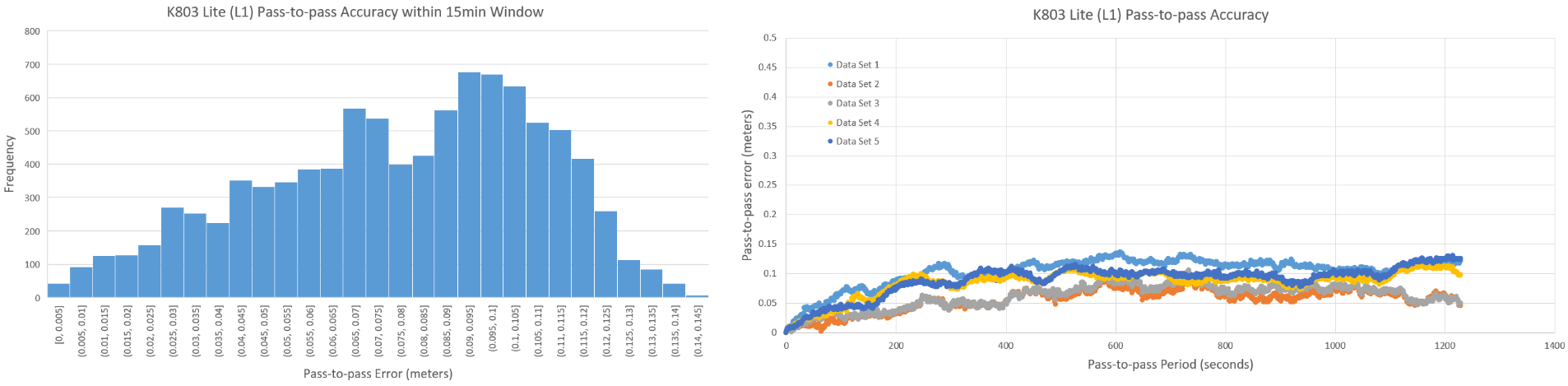
Fig. 2 et Fig. 3 Précision de passage à passage du module K803 Lite (L1)
2 Plan de test

Fig. 4 Testing route on Google Earth map
Device Model | Manufacture | Serial Number | Firmware |
K803 Lite (L1) GNSS Module | ComNav Technology | 09000053 | 600A9_a27 |

Fig. 5 Test Scene
(1) By comparing the coincidence of multiple trajectories on the straight line to analyze the pass-to-pass accuracy of K803 Lite (L1).
(2) By comparing the coincidence of DP-filter trajectories and RTK trajectories to analyze the overall accuracy of K803 Lite (L1).
The test was conducted for two rounds,
1st round | full constellation tracking | pushed the trolley for 17 laps |
2nd round | masked BDS-2 tracking | pushed the trolley for 31 laps |
3 Test Result
Since the single point accuracy of DP-filter positioning is within 1m. In order to facilitate trajectory comparison and analysis, the following test results have moved the starting point of the DP-filter data to the starting point of RTK data.
As shown in Fig. 6 & Fig. 7, the pass-to-pass accuracy of K803 Lite (L1) is about 10cm. There is no obvious track deviation within 17 laps.
In the end, the trajectory deviated from the RTK track by 5cm.
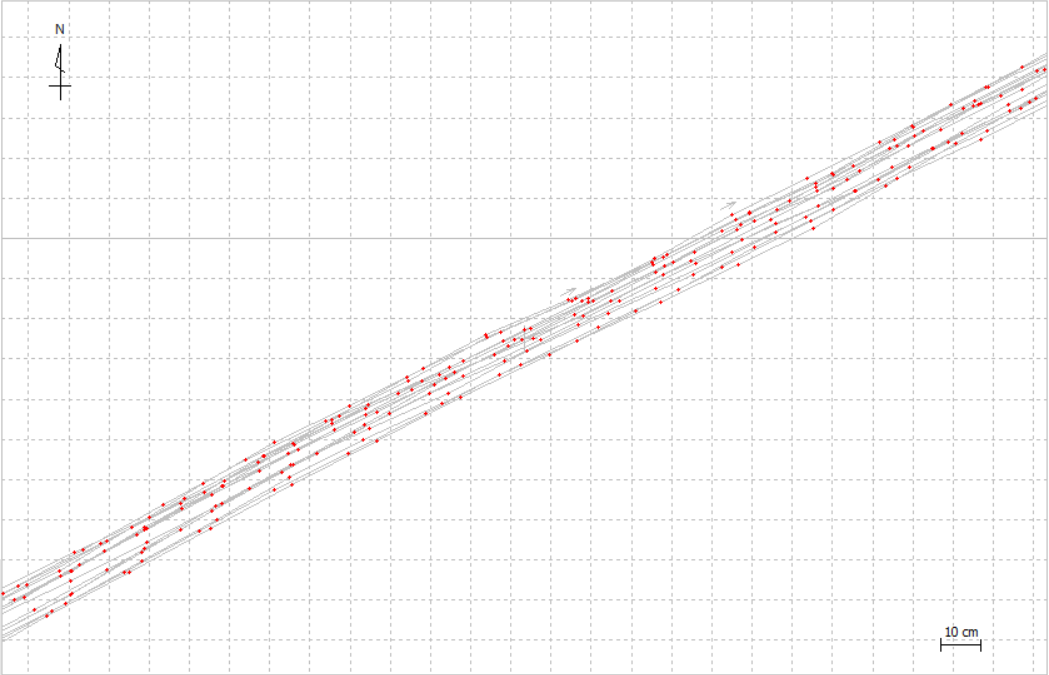
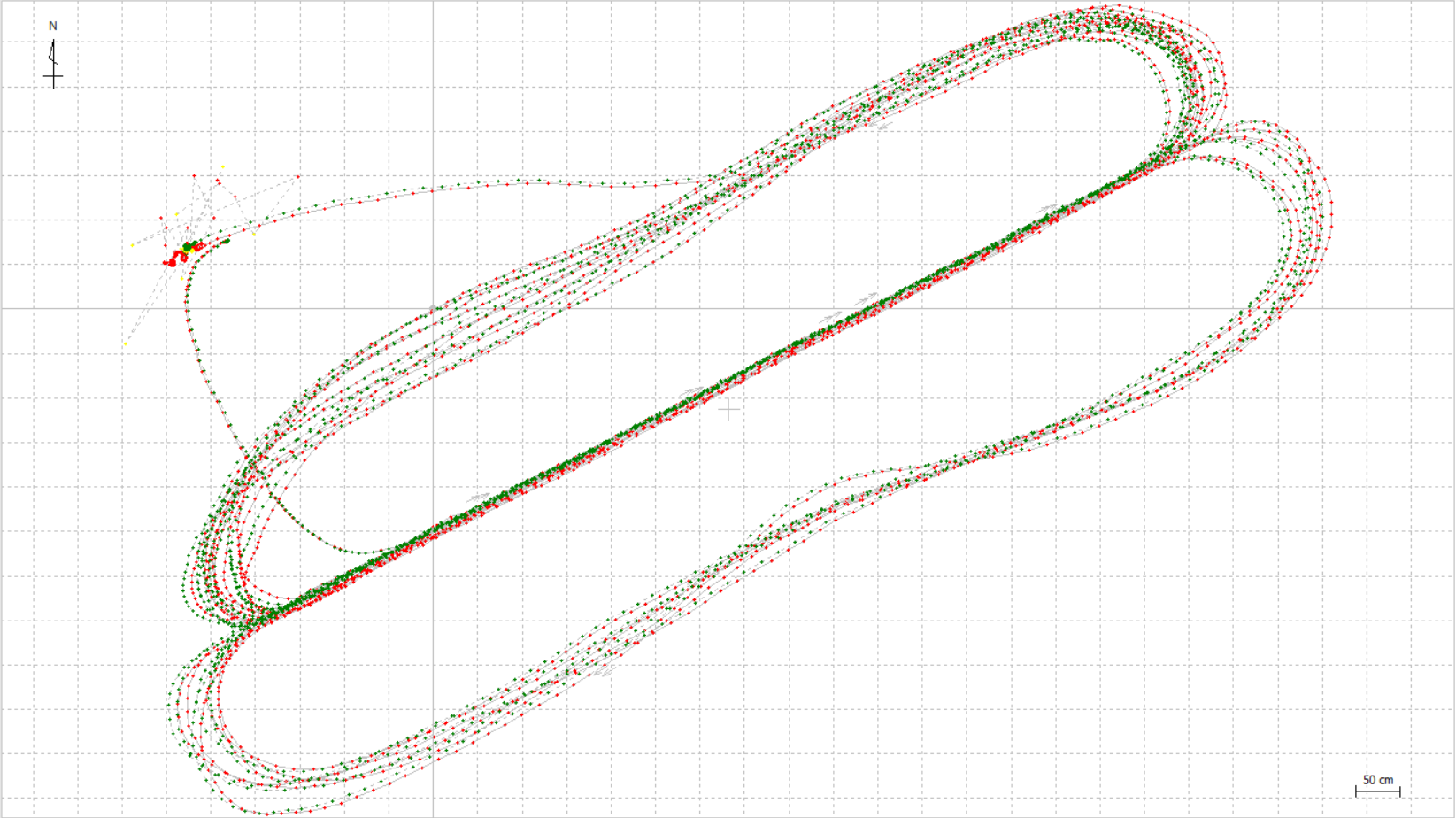
Fig. 6 & Fig. 7 Round1 test trajectory, K803Lite (L1)-Red, RTK-Green
As shown in Fig. 8 & Fig. 9, the pass-to-pass accuracy of K803 single-frequency is about 15cm, which also included the human error when pushing the trolly. There is no obvious track deviation within 31 laps.
In the end, the trajectory deviated from the RTK track by 10cm.
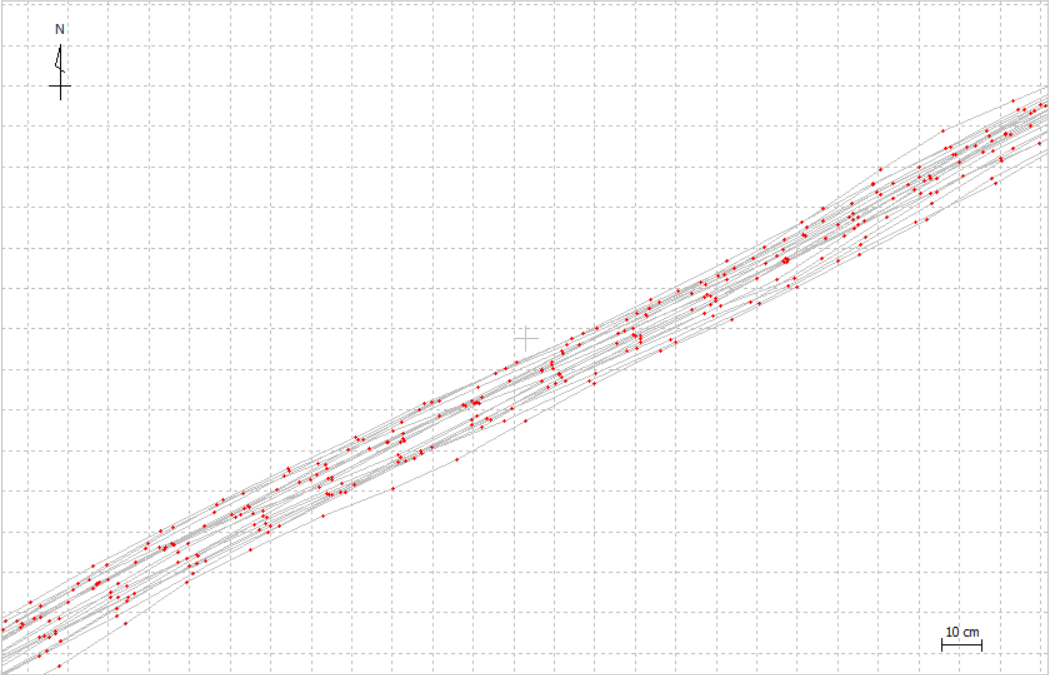
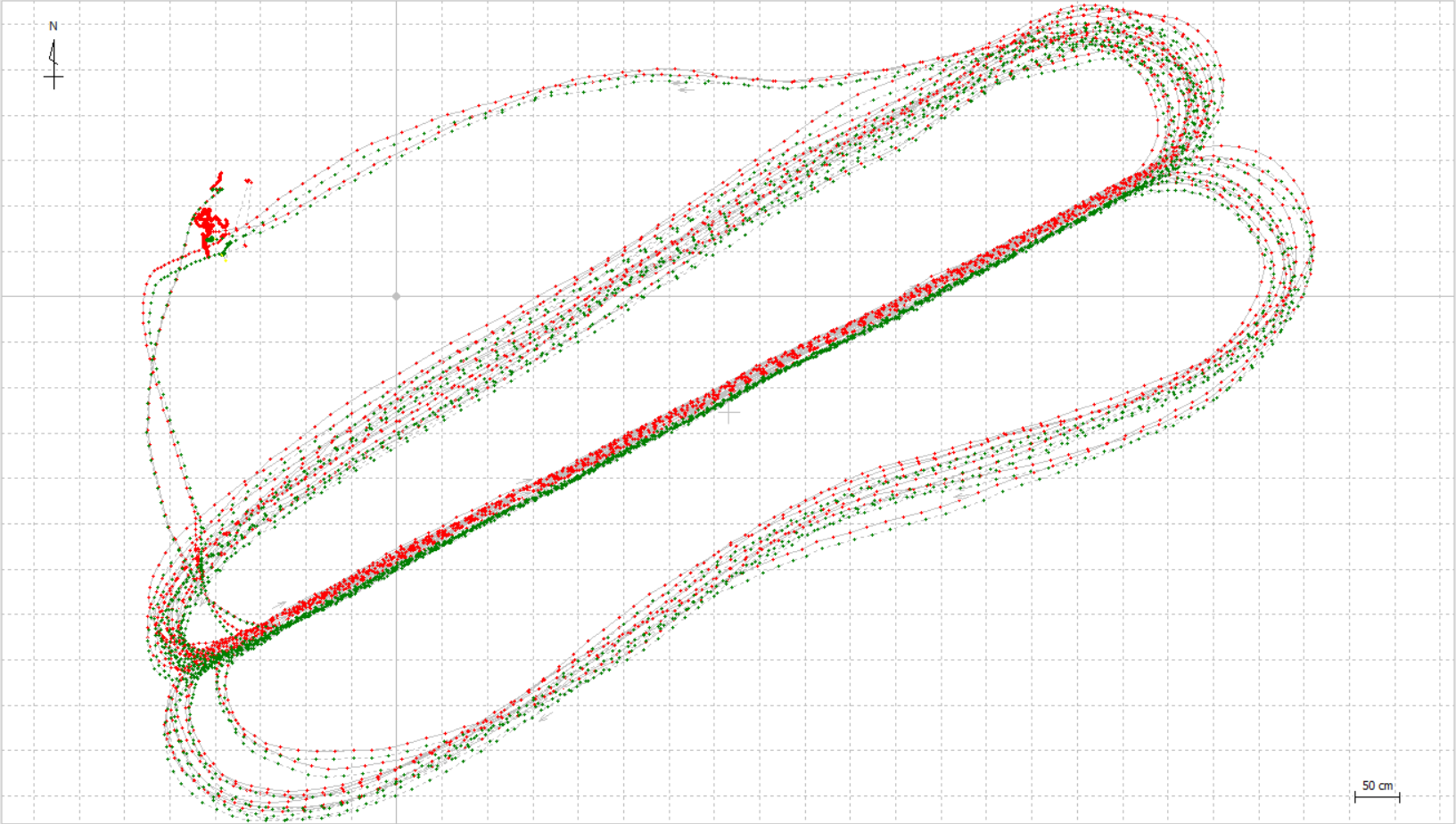
Fig. 8 & Fig. 9 Round2 test trajectory, K803Lite (L1)-Red, RTK-Green
4 En conclusion
Il prend en charge l’arpentage d’inclinaison IMU jusqu’à 60 degrés.
Tableau 2 : Résultats des tests
Passe à passe (cm) | Écart par rapport au RTK (cm) | |
1er tour (17 tours) | 10 | 5 |
2ème manche (31 tours) | 15 | 10 |
* L’erreur de passe à passe comprend également l’erreur humaine lors de la poussée du chariot.
(1) La précision de passage à passage du K803Lite (L1) pouvait atteindre environ 15 cm, que ce soit dans la zone couverte par BDS-2 ou non.
(2) Le K803 Lite (L1) a montré de meilleures performances de filtre DP en situation de suivi de constellation complète.
(3) L’écart entre la trajectoire lisse du K803 Lite (L1) et la trajectoire de contraste RTK est de moins de 10 cm, que ce soit dans la zone couverte par BDS-2 ou non.
À propos de ComNav Technology
ComNav Technology développe et fabrique des cartes et des récepteurs GNSS OEM pour les applications de positionnement de haute précision. Sa technologie a déjà été utilisée dans un large éventail d’applications telles que l’arpentage, la construction, le contrôle des machines, l’agriculture, le transport intelligent, le chronométrage précis, la surveillance des déformations, les systèmes sans pilote. Avec une équipe dédiée à la technologie GNSS, ComNav Technology fait de son mieux pour fournir des produits fiables et compétitifs à des clients du monde entier. ComNav Technology a été cotée à la Bourse de Shanghai (Science and Technology Board), valeurs mobilières :ComNav Technology (Compass Navigation), Code boursier : 688592.
À propos de SinoGNSS®
SinoGNSS® est la marque officielle de ComNav Technology Ltd., déposée en République populaire de Chine, dans l’UE, aux États-Unis et au Canada. Toutes les autres marques sont la propriété de leurs propriétaires respectifs.