Un exitoso proyecto de mapeo de UAV RTK con DJI Phantom 4 RTK y SinoGNSS T300 Plus
1. Descripción general del proyecto
Es necesario medir y cartografiar una zona residencial rural de Shanghái de 250000 m² (como se muestra en la Fig.1) para obtener un mapa de alta precisión. Con un área grande, presión de tiempo y personal inadecuado, el uso de métodos de topografía tradicionales es un desafío para completar el proyecto. Por lo tanto, se propone una excelente solución que combina el Phantom 4 RTK (en lo sucesivo, P4R) y el receptor GNSS T300 Plus sin puntos de control de imagen, con poco trabajo de campo y ahorro de mano de obra.

Fig. 1 Entorno del sitio
2. Desafíos
El entorno rural está cubierto por una red 4G deficiente, ya que normalmente las estaciones base y los vehículos aéreos no tripulados transmiten flujos de corrección a través de 4G.
La ausencia de puntos de control de imagen reducirá la carga de trabajo, pero no provocará una validación de precisión.
Los operadores de proyectos se enfrentan a desafíos técnicos, ya que el nuevo método de agrimensura difiere en gran medida del tradicional.
3. Beneficio
Menos carga de trabajo: En comparación con el mapeo tradicional de UAV, el mapeo de drones RTK depende menos de los puntos de control, ya que es de alta precisión, lo que reducirá la carga de trabajo en gran medida.
Conexión WIFI: Equipado con el módulo WIFI, T300 Plus puede transmitir datos fácilmente, sin la restricción de Internet.
Validación de precisión: Además de ser una estación base, el T300 Plus también puede funcionar como un rover para medir las coordenadas de los puntos de control para la validación de la precisión.
Fácil de usar: fácil configuración y flujo de trabajo simple, sin umbral para los usuarios.
Copia de seguridad de PPK: Para evitar situaciones en las que RTK no sea aplicable, T300 Plus también proporciona PPK como plan de copia de seguridad, que se puede realizar simultáneamente con RTK.
4. Resumen del proyecto
4.1 Fecha
El trabajo de campo se completó el 26/10/2020, el trabajo de oficina se realizó del 26/10/2020 al 27/10/2020.
4.2 Ubicación
Beixin Village, Distrito de Jiading, Shanghái, China
4.3 Instrumentos
1 × DJI Phantom 4 RTK
1 × Receptor GNSS T300 Plus
5 × marcas de verificación
4.4 Software
Maestro de Topografía
Pix4Dmapper
4.5 Procedimiento
4.5.1 Configurar puntos de control
Se colocaron 5 puntos de control sobre el área de mapeo de manera uniforme, cuya distribución se mostró en la Fig. 2. Las coordenadas fueron relevadas por el receptor SinoGNSS T300 Plus a través del® software Survey Master en modo PDA CORS. Survey Master mejora la comodidad y la fiabilidad de este proyecto de medición, ya que su sólida funcionalidad y su flujo de trabajo simplificado. Sin necesidad de un controlador, se puede descargar fácilmente desde Google Play Store e instalar en un teléfono inteligente basado en Android.
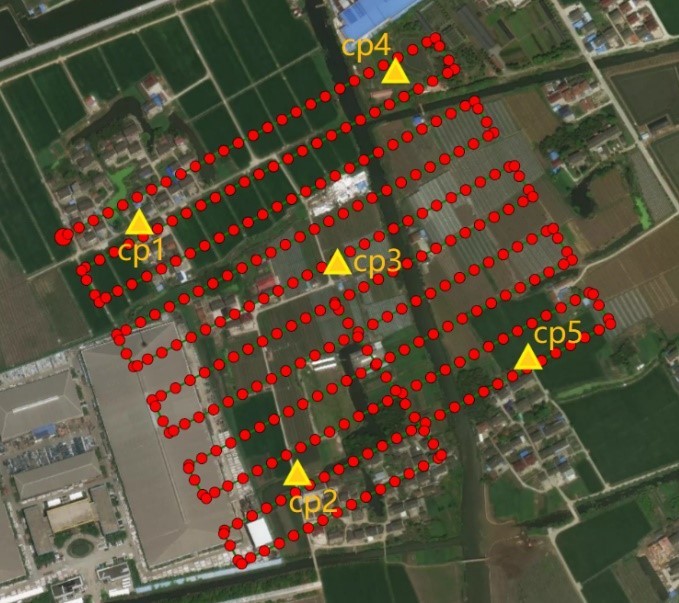
Fig. 2 Distribución de los puntos de control marcados en amarillo
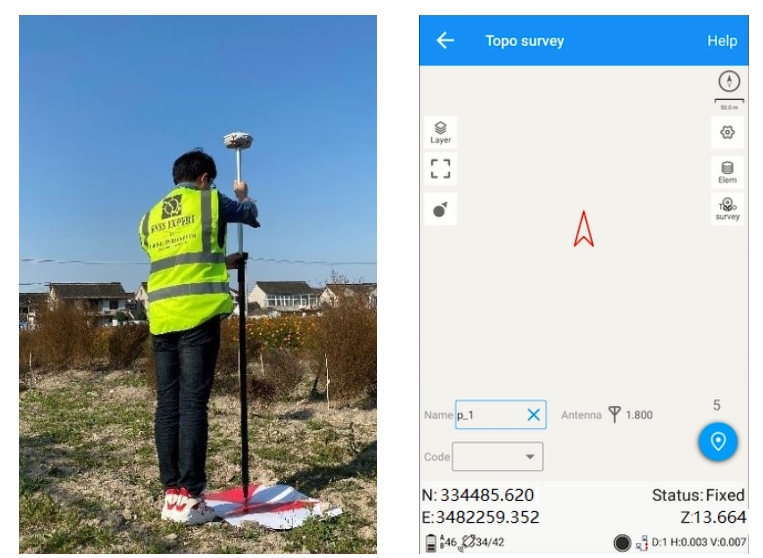
Fig. 3 Medición del punto de control (L) e interfaz maestra de topografía (R)
Los puntos de control solo se utilizaron para la validación de la precisión sin participar en el procesamiento de los datos, sin influir en el resultado final.
4.5.2 Configurar la estación base
En el punto de control (punto conocido) del área de mapeo, T300 Plus se configuró como estación base para transmitir datos de corrección a P4R, conectado a P4R a través de un enlace WIFI. Benefíciese de la interfaz de usuario web del T300 Plus (que se muestra en la Fig. 5), es fácil configurar las coordenadas de puntos conocidas y los ajustes relacionados en el control remoto P4R.

Fig. 4 Estación base
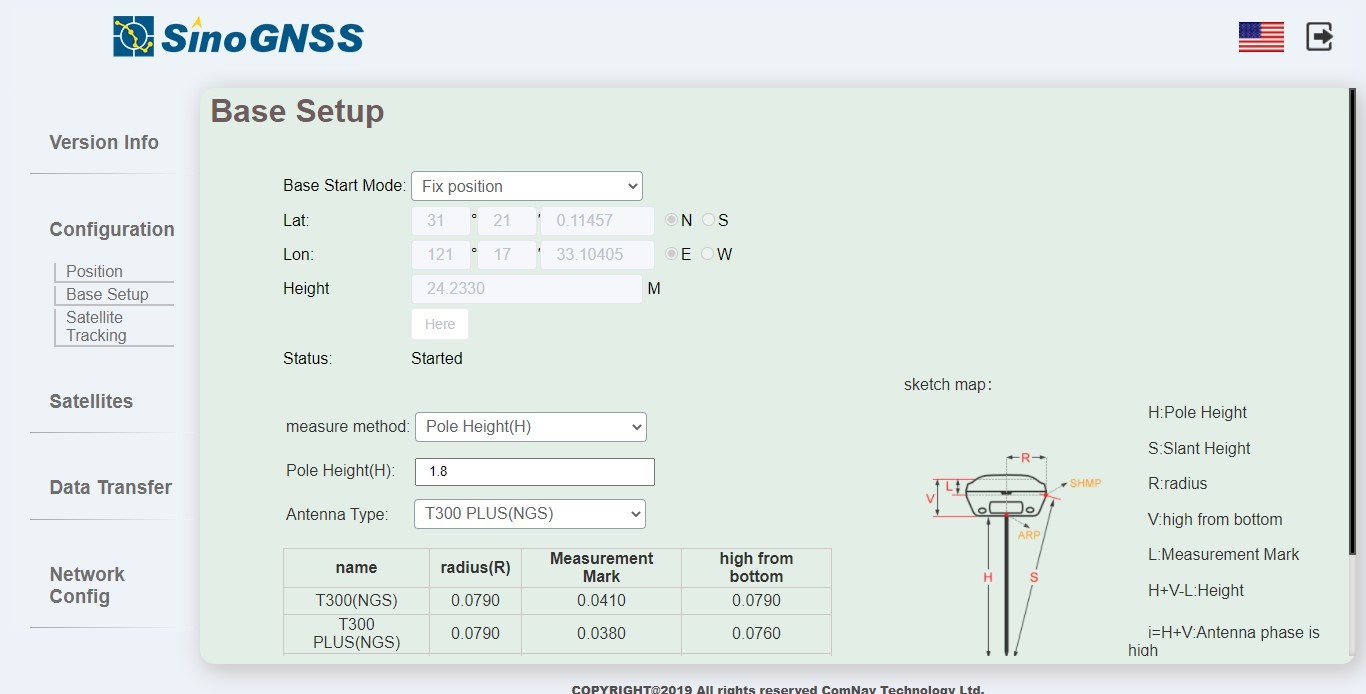
Figura 5 Interfaz de usuario web del T300 Plus
4.5.3 Configuración de UAV
La ruta de vuelo y los ajustes pertinentes se configuraron en el mando a distancia antes de volar, que se indican en la Ficha 1 y en la Fig. 6, respectivamente. El mapeo de UAV tardó solo 13 minutos en recopilar un total de 333 datos de imágenes en la gran área del sitio de 250000 m2. Al tomar cada imagen, las coordenadas del CMOS se inspeccionaron a través del módulo RTK y se adjuntaron a los datos de cada imagen.
Pestaña 1: Parámetros de vuelo
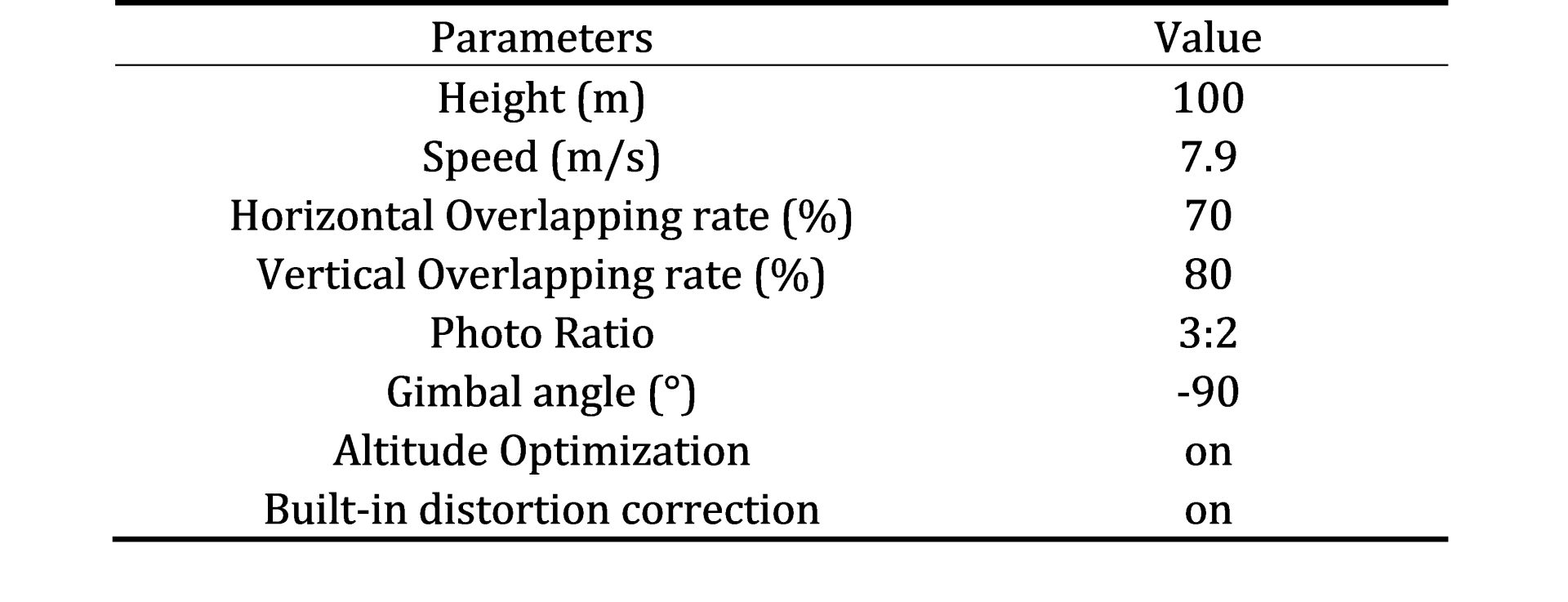

Fig. 6 Ruta de vuelo
4.5.4 Procesamiento de datos
Después de la entrada de las imágenes P4R en Pix4Dmapper, los procesos relacionados se ejecutaron automáticamente, incluida la inicialización, la unión de imágenes, la corrección de la distorsión, etc., y finalmente se generaron los resultados DOM (Mapa Digital de Ortofotos) y DSM (Modelo Digital de Superficie), como se muestra en la Fig. 7 y la Fig. 8. La GSD (distancia media de muestreo del suelo) es de 2,95 cm.
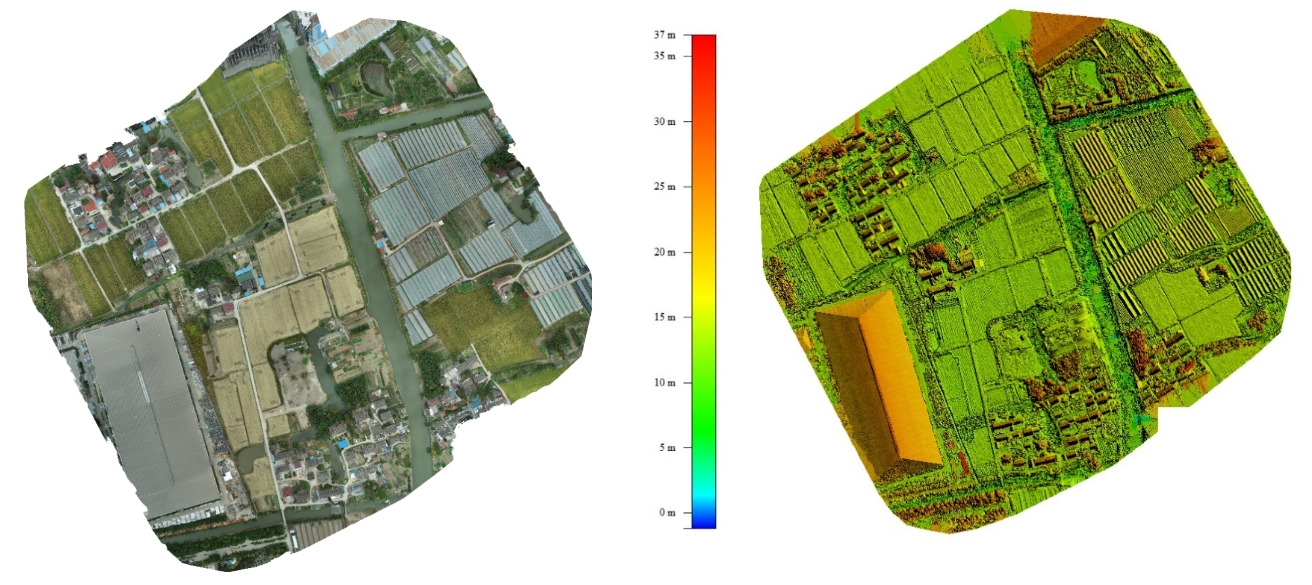
Fig. 7 DResultado de la MO (L) Fig. 8 Resultado de la DSM (R)
4.5.5 Validación de la precisión
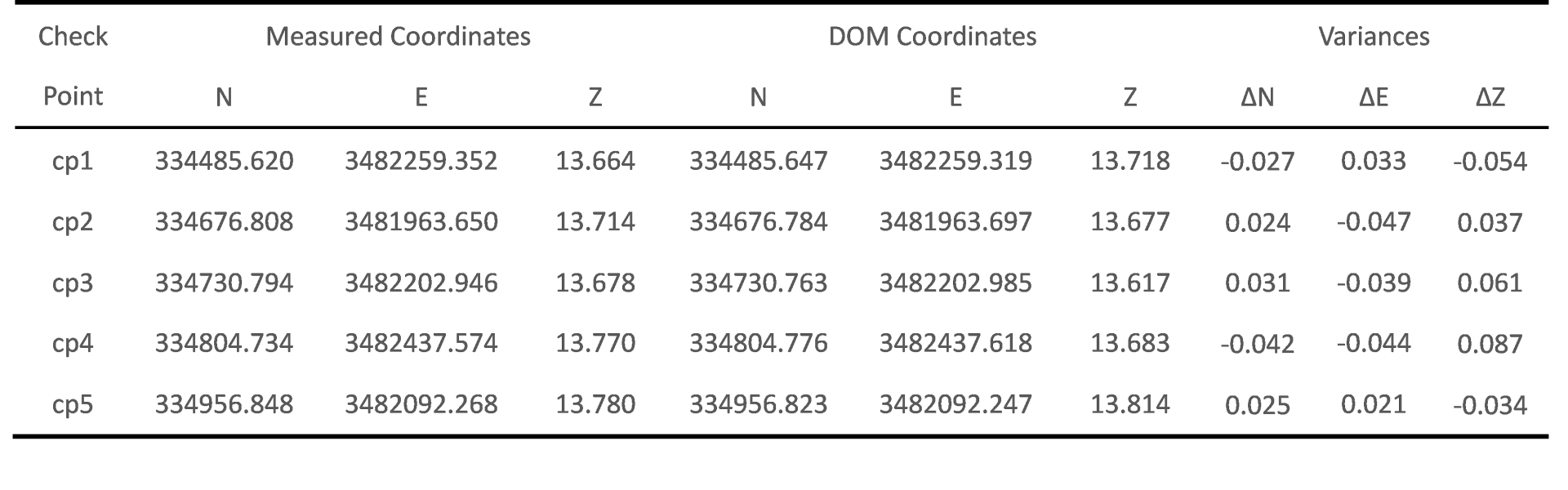
Sobre la base de los puntos de control medidos, se calcularon las variaciones entre las coordenadas DOM y las coordenadas medidas para validar la precisión. Están dentro de los 10 cm verticales y 5 cm horizontales, como se ilustra en la pestaña 2 a continuación.
Pestaña 2: Precisión de los puntos de control
5. Conclusión
En conclusión, en comparación con el mapeo tradicional de UAV o la topografía terrestre, el mapeo de drones RTK con P4R manifestó una mayor eficiencia, un flujo de trabajo más simple y menos carga de trabajo. lo que puede ahorrar tiempo y mano de obra, convirtiendo una gran proporción del trabajo de campo en trabajo de oficina. La solución de mapeo que combina una estación base T300 Plus continua y confiable con un rover UAV comercial del Phantom 4 RTK puede proporcionar una precisión de mapeo a nivel centimétrico para satisfacer la mayoría de las demandas de trabajo de topografía. Por lo tanto, es de alta precisión y rentable.
Como parte indispensable de esta solución de mapeo, el receptor T300 Plus desempeñó un papel de respaldo potente. La compatibilidad con la conexión WIFI permite una transmisión estable de flujos de corrección. Su interfaz de usuario web incorporada facilita la configuración. El plan de copia de seguridad de PPK reduce la dependencia absoluta de RTK. El estudio de rover de alta precisión realiza la validación de precisión del mapeo de UAV. Se puede decir que es la mejor opción de estación base de su clase para el mapeo de drones.
Para obtener más información sobre el estudio de caso, consulte el siguiente enlace.
https://cetest02.cn-bj.ufileos.com/fsite_1802020370/DJI_CaseStudy.pdf
Acerca de la tecnología ComNav
ComNav Technology desarrolla y fabrica placas y receptores GNSS OEM para aplicaciones de posicionamiento de alta precisión. Su tecnología ya se ha utilizado en una amplia gama de aplicaciones, como topografía, construcción, control de máquinas, agricultura, transporte inteligente, sincronización precisa, monitoreo de deformaciones, sistemas no tripulados. Con un equipo dedicado a la tecnología GNSS, ComNav Technology está haciendo todo lo posible para suministrar productos confiables y competitivos a clientes de todo el mundo. ComNav Technology cotiza en la Bolsa de Valores de Shanghái (Junta de Ciencia y Tecnología), valores: ComNav Technology (Compass Navigation), código bursátil: 688592.
Acerca de SinoGNSS®
SinoGNSS® es la marca comercial oficial de ComNav Technology Ltd., registrada en la República Popular China, la UE, EE. UU. y Canadá. Todas las demás marcas comerciales son propiedad de sus respectivos dueños.