Rapport d’analyse des performances du service de haute précision (HAS) de Galileo
 Introduction
Introduction

Fig.1 Comparaison des résultats de positionnement PPP-HAS et des résultats de positionnement RTK du site de Belgique
Ce rapport se concentre sur la précision des informations de correction fournies par HAS, et utilise le programme PPP-HAS développé par SinoGNSS pour évaluer les performances de positionnement des données mesurées nationales et étrangères.

1 Données et méthode
Ce rapport utilise des récepteurs auto-développés par SinoGNSS pour la collecte de données. L'environnement de collecte des données est principalement en ciel ouvert. Les tests ont été effectués à travers le monde, en sélectionnant certains pays typiques pour analyser les performances à différents endroits. Il comprend quatre sites en Chine et un site en Afrique, en Amérique du Sud, en Amérique du Nord et en Europe respectivement. Les données de stations multiples font l'objet de tests PPP continus sur plusieurs jours pour l'évaluation.

Fig.3 Environnement de test
Les données d'observation utilisées pour évaluer les performances du service HAS du système de navigation par satellite Galileo proviennent de données de 4 villes en Chine et de 4 pays étrangers. La répartition des noms de sites spécifiques et le temps des échantillons affichés dans l'article sont présentés dans le Tableau 1.
| Lieu d'échantillonnage | Latitude | Longitude | Date des statistiques d'échantillonnage des données | Date d'affichage de l'image du rapport |
|---|---|---|---|---|
| Chine-Shanghai (Asie) | 31.35°N | 121.29°E | 2023/09/01 - 2023/10/08 | 28/09 10:30-21:20 (statique) 18/09, 22/09 (dynamique) |
| Chine-Pékin (Asie) | 39.98°N | 116.41°E | 2023/10/17 - 2023/11/05 | 06/11 01:00-24:00 |
| Chine-Guangzhou (Asie) | 23.18°N | 112.42°E | 2023/12/02 - 2023/12/04 | 04/12 00:00-15:20 |
| Chine-Xinjiang (Asie) | 44.57°N | 86.62°E | 2023/10/17 - 2023/10/26 | 23/10 01:00-22:30 |
| Ouganda (Afrique) | 0.4150°N | 32.59°E | 2023/03/22 - 2023/03/26 | 22/03 16:30-00:00 |
| Brésil (Amérique du Sud) | 25.49°S | 49.22°W | 2023/03/27 | 27/03 12:00-20:00 |
| Belgique (Europe) | 50.35°N | 4.892°E | 2023/03/16 | 16/03 19:30-17/03 10:00 |
| Canada (Amérique du Nord) | 53.60°N | 113.92°W | 2023/12/13 | 13/12 00:00-04:00 |
Le Tableau 2 montre les méthodes de traitement de l'ambiguïté, du biais d'horloge et d'autres paramètres connexes dans le processus de positionnement.
| Paramètres principaux | Stratégie de solution |
|---|---|
| Observations | Observations combinées pseudo-distance et onde porteuse sans ionosphère |
| Taux d'échantillonnage | 1Hz |
| Enveloppement de phase | Correction de modèle |
| Marée terrestre solide, marée océanique | Correction de modèle |
| Méthode d'estimation des paramètres | Filtre de Kalman robuste |
| Délai ionosphérique | Élimination combinée sans ionosphère |
| Ambiguïté | Estimation des paramètres |
| Délai troposphérique | Estimation des paramètres |
| Biais d'horloge du satellite, orbite | Utilisation des produits HAS de Galileo |
| Détection des sauts de cycle | Combinaison Melbourne-Wübbena et combinaison sans distance géométrique |
Lors de l'utilisation du PPP-HAS pour le positionnement, l'équation d'observation de base de la pseudorange et de l'onde porteuse est :
\( P_i = \rho_i + I_i + T + cdt_{r} - cdt^s - c(B_{r} + B^s) + \epsilon_{P} \) (Eq.1)
\( \Phi_i = \rho_i - I_i + T + cdt_{r} - cdt^s - c(b_{r} + b^s) + \lambda_i N_i + \epsilon_{\Phi} \) (Eq.2)
P représente la valeur d'observation de la pseudorange, Φ représente la valeur d'observation de l'onde porteuse, λ représente la longueur d'onde de la phase de la porteuse, i indique que l'erreur est liée à la fréquence du signal, ρ représente la distance géométrique entre le satellite et le récepteur, dtr et dts sont respectivement le biais d'horloge du récepteur et le biais d'horloge du satellite, I représente le délai ionosphérique, T représente le délai troposphérique, Br, et Bs représentent respectivement le délai matériel côté récepteur et côté satellite de la partie pseudorange, br et bs représentent respectivement le délai matériel côté récepteur et côté satellite de la partie porteuse, N est l'ambiguïté entière du signal de phase de porteuse en cycles, ξ représente le bruit d'observation et d'autres erreurs non modélisées. Lors de l'exécution du positionnement PPP, établissez un modèle combiné sans ionosphère selon Eq. 3 et Eq. 4.
\( P_{IF} = \frac{f_1^2 P_1 - f_2^2 P_2}{f_1^2 - f_2^2} = \rho + cdt_{r} - cdt^{s} + T + \epsilon_{P_{IF}} \) (Eq.3)
\( \Phi_{IF} = \frac{f_1^2 \Phi_1 - f_2^2 \Phi_2}{f_1^2 - f_2^2} = \rho + cdt_{r} - cdt^{s} + T + \lambda_{IF} N_{IF} + \epsilon_{\Phi_{IF}} \) (Eq.4)
Les Eq. 3 et Eq. 4 sont les équations d'observation combinées sans ionosphère. Le modèle de combinaison sans ionosphère peut éliminer l'influence de l'ionosphère de premier ordre. Les paramètres à estimer incluent seulement 3 paramètres de position, le biais d'horloge du récepteur, le délai troposphérique zenithal et l'ambiguïté combinée de la phase de la porteuse. Après avoir établi le modèle, des stations de base nationales et étrangères sont sélectionnées pour recevoir les données d'observation des satellites et les données HAS, et les paramètres pertinents sont traités conformément au Tableau 2. La Fig. 4 est utilisée pour vérifier le positionnement précis sans ionosphère.
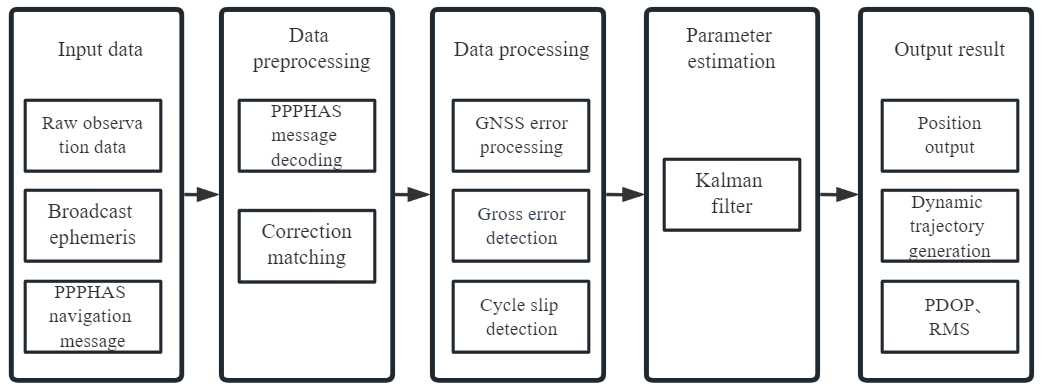
Fig.4 Processus de l'algorithme de positionnement ponctuel précis basé sur le service PPP-HAS
2 Analyse de performance en scène statique
Cette section utilise principalement le PPP-HAS pour évaluer la précision de positionnement. Les Fig.5 à Fig.12 montrent les écarts de positionnement PPP dans quatre villes différentes, où l'axe horizontal est le temps GPS. D'après la figure, nous pouvons voir les résultats de positionnement du site après la convergence des résultats. Les résultats de positionnement nationaux sont calculés et moyennés statistiquement pour obtenir le résultat final.
Lorsque la précision horizontale des résultats de positionnement est inférieure à 20 cm et que la précision pour 100 époques consécutives ne dépasse pas 20 cm, les résultats sont considérés comme convergés. Le Tableau 3 fournit des statistiques moyennes des résultats de positionnement de quatre sites nationaux.
| Sites | E-S/cm | N-O/cm | U-D/cm | RMS 2D horizontal/cm (95%) | RMS 2D vertical/cm (95%) | Temps de convergence /min |
|---|---|---|---|---|---|---|
| Shanghai | 8.7 | 6.1 | 17.9 | 19.7 | 26.9 | 23.8 |
| Pékin | 8.2 | 4.9 | 18.3 | 29.8 | 20.4 | 27.8 |
| Xinjiang | 9.2 | 8.9 | 16.3 | 21.4 | 33.0 | 27.4 |
| Guangzhou | 7.6 | 5.1 | 14.1 | 11.6 | 18.2 | 29.6 |
| Valeur moyenne | 8.4 | 6.3 | 16.7 | 20.6 | 24.6 | 24.7 |
En suivant, vous pouvez obtenir des informations détaillées sur chaque station pour la précision.
 Site 1: Shanghai
Site 1: Shanghai
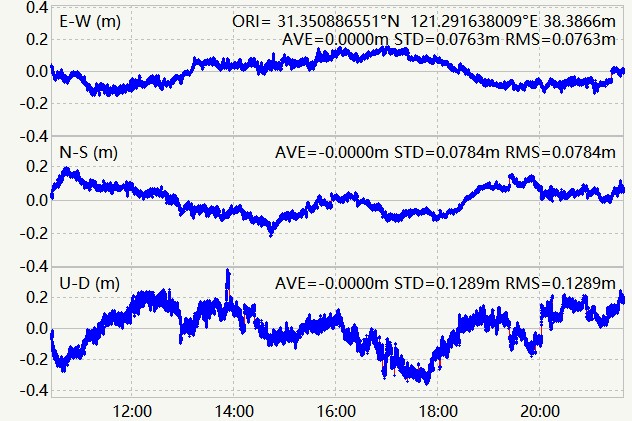 Fig.5 Solution de positionnement PPP-HAS du site de Shanghai |
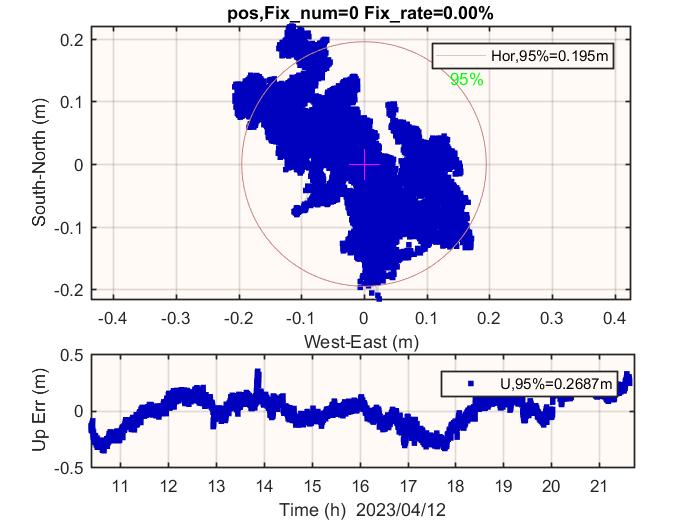 Fig.6 Carte de positionnement plan du site de Shanghai |
Site 2: Pékin
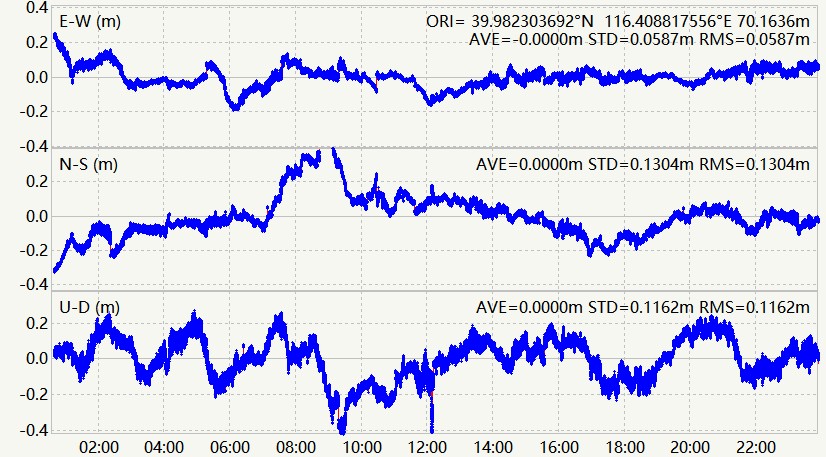 Fig.7 Solution de positionnement PPP-HAS du site de Pékin |
 Fig.8 Carte de positionnement plan du site de Pékin |
Site 3: Province du Xinjiang
 Fig.9 Solution de positionnement PPP-HAS du site du Xinjiang |
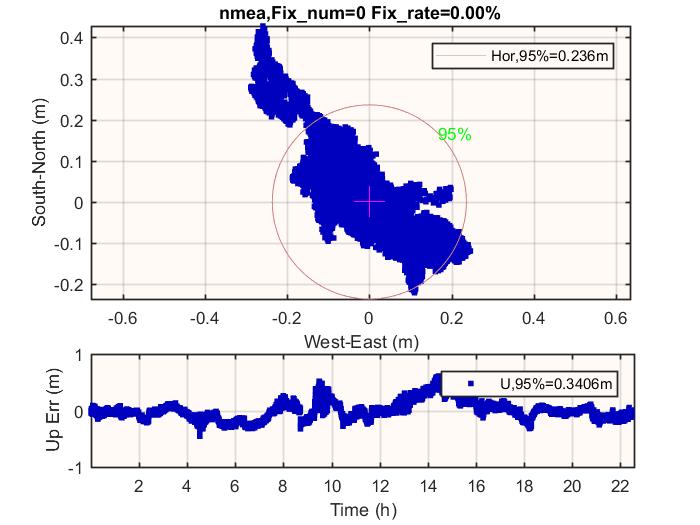 Fig.10 Carte de positionnement plan du site du Xinjiang |
Site 4: Province du Guangzhou
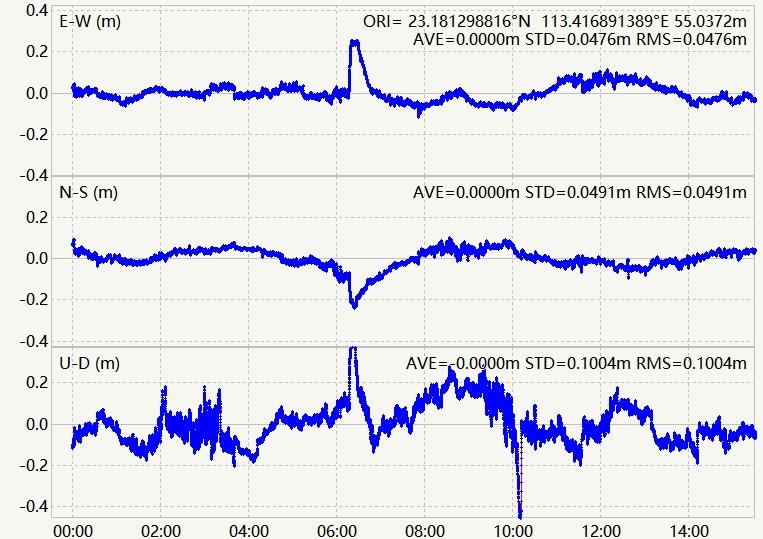 Fig.11 Solution de positionnement PPP-HAS du site du Guangzhou |
 Fig.12 Carte de positionnement plan du site du Guangzhou |
En plus des tests en Chine, nous avons sélectionné certains pays typiques pour effectuer les tests de performance. Les Fig.13 à Fig.20 montrent les écarts de positionnement de chaque site. Le Tableau 4 présente les statistiques de la précision moyenne sur plusieurs jours et du temps de convergence des sites sélectionnés.
| Sites | E-S/cm | N-O/cm | U-D/cm | RMS 2D horizontal/cm (95%) | RMS 2D vertical/cm (95%) | Temps de convergence /min |
|---|---|---|---|---|---|---|
| Ouganda | 5.2 | 4.9 | 11.3 | 17.5 | 25.8 | 17.6 |
| Brésil | 6.3 | 3.0 | 12.1 | 24.0 | 25.1 | 13.8 |
| Belgique | 4.5 | 6.6 | 13.3 | 10.4 | 17.0 | 16.4 |
| Canada | 7.3 | 7.9 | 8.5 | 26.8 | 15.7 | 15.7 |
| Valeur moyenne | 5.83 | 5.6 | 11.3 | 19.67 | 20.9 | 15.87 |
En suivant, vous pouvez obtenir des informations détaillées sur chaque station pour la précision.
Site 1: Ouganda en Afrique
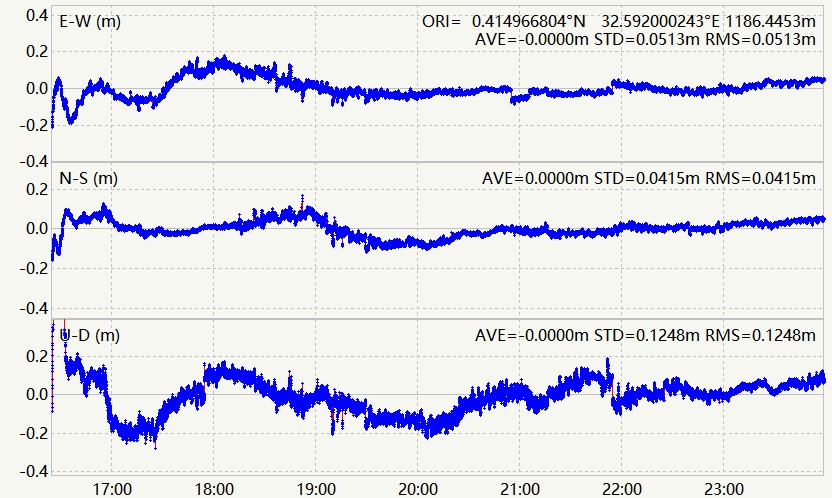 Fig.13 Solution de positionnement PPP-HAS du site de l'Ouganda |
 Fig.14 Carte de positionnement plan du site de l'Ouganda |
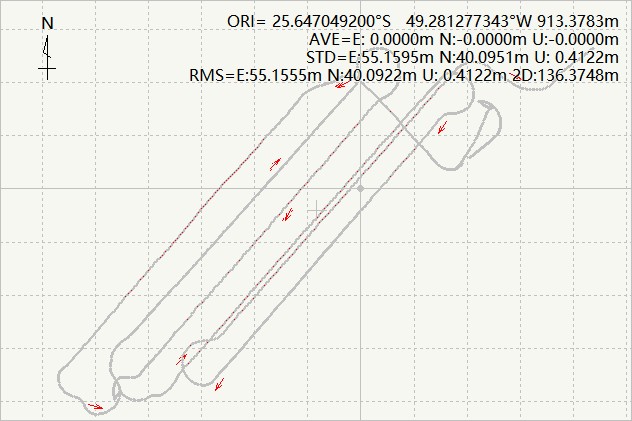
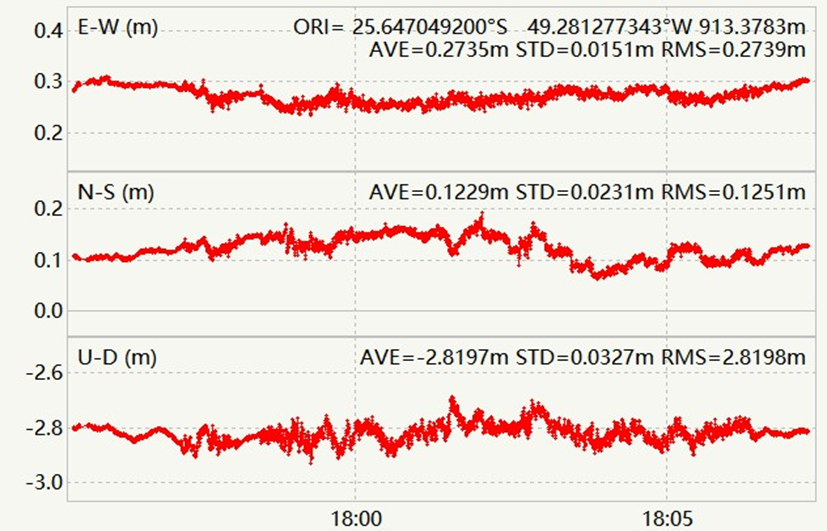
Site 2: Brésil en Amérique du Sud
 Fig.15 Solution de positionnement PPP-HAS du site du Brésil |
 Fig.16 Carte de positionnement plan du site du Brésil |
Site 3: Belgique en Europe
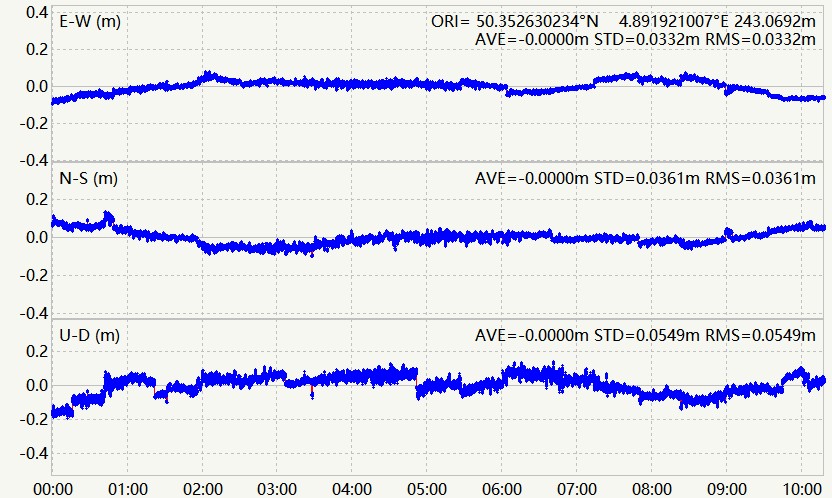 Fig.17 Solution de positionnement PPP-HAS du site de Belgique |
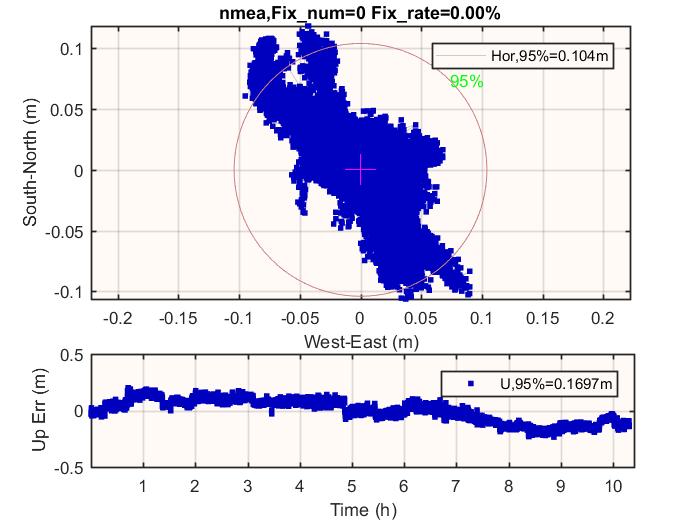 Fig.18 Carte de positionnement plan du site de Belgique |
Site 4: Canada en Amérique du Nord
 Fig.19 Solution de positionnement PPP-HAS du site du Canada |
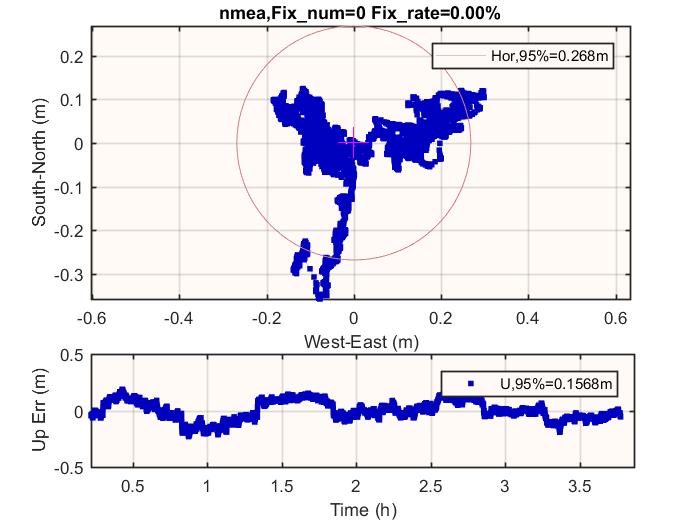 Fig.20 Carte de positionnement plan du site du Canada |
3 Analyse de performance en scène dynamique
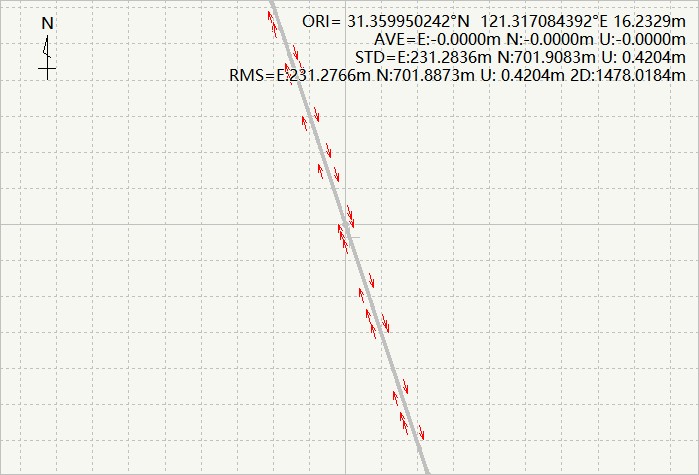
Afin d'examiner les performances du positionnement ponctuel précis dynamique en temps réel basé sur le service PPP-HAS, une expérience de test dynamique de véhicule a été réalisée du 1er septembre au 10 octobre 2023. Le module utilisé était la carte SinoGNSS K803, et l'environnement était un environnement ouvert. La Fig.23 montre les résultats des tests à Shanghai le 7 novembre, la Fig.26 montre les résultats des tests au Brésil le 4 décembre. Comparé aux résultats RTK de haute précision, on peut voir que la différence entre les résultats de positionnement dynamique en temps réel PPP-HAS après stabilité et les résultats de positionnement RTK de haute précision est au niveau du décimètre.
Fig.21 Résultats de positionnement dynamique en temps réel PPP-HAS-1 |
Fig.22 Différence entre les résultats PPP-HAS et RTK-1 |
Fig.23 Résultats de positionnement dynamique en temps réel PPP-HAS-2 |
Fig.24 Différence entre PPP-HAS et RTK-2 |

Conclusion
Le service Galileo PPP HAS couvre la grande majorité des pays du monde, avec un temps de convergence moyen de 15 à 20 minutes et une précision moyenne de 20 cm RMS 2D après convergence. Les pays européens ont tendance à connaître de meilleures performances par rapport aux autres.
Le service Galileo High Accuracy Service (HAS), une solution de positionnement ponctuel précis (PPP) par satellite gratuit, offre des avantages inégalés dans une myriade d'applications. De la topographie traditionnelle et de la collecte de données SIG aux environnements dynamiques tels que l'agriculture de précision, les UAV et la conduite intelligente, Galileo HAS révolutionne le positionnement global avec sa précision et sa fiabilité.
À propos de ComNav Technology
ComNav Technology développe et fabrique des cartes et des récepteurs GNSS OEM pour les applications de positionnement de haute précision. Sa technologie a déjà été utilisée dans un large éventail d’applications telles que l’arpentage, la construction, le contrôle des machines, l’agriculture, le transport intelligent, le chronométrage précis, la surveillance des déformations, les systèmes sans pilote. Avec une équipe dédiée à la technologie GNSS, ComNav Technology fait de son mieux pour fournir des produits fiables et compétitifs à des clients du monde entier. ComNav Technology a été cotée à la Bourse de Shanghai (Science and Technology Board), valeurs mobilières :ComNav Technology (Compass Navigation), Code boursier : 688592.
À propos de SinoGNSS®
SinoGNSS® est la marque officielle de ComNav Technology Ltd., déposée en République populaire de Chine, dans l’UE, aux États-Unis et au Canada. Toutes les autres marques sont la propriété de leurs propriétaires respectifs.