
Recommander des commandes pour l’intégration du système
 1 Objet
1 Objet
Comme de plus en plus d’utilisateurs intègrent les modules GNSS de haute précision de ComNav dans diverses applications, telles que la robotique, les drones, l’arpentage et la cartographie, l’agriculture de précision, la conduite automatique, pour améliorer la débogabilité du système, il est conseillé de réserver un port pour la communication avec le module interne dans les modules GNSS de haute précision de ComNav. Cela permet aux utilisateurs de visualiser facilement les informations du module ultérieurement et d’accéder aux données pour analyse si nécessaire.

2 Suggestions d’intégration
Pour système avec mémoire
Lors de la conception d’appareils équipés d’une mémoire interne, il est fortement conseillé d’intégrer une fonctionnalité permettant de stocker les messages de débogage. Comme un fichier journal standard, ces messages de débogage peuvent être inestimables à des fins de débogage futurs, facilement accessibles en cas de besoin. La mise en œuvre d’un stockage cyclique ou d’une suppression programmée, par exemple hebdomadaire, garantit que l’utilisation de la mémoire reste minimale tout en offrant une assistance significative pour les futurs efforts de débogage. En plus de stocker les messages par défaut, la possibilité de personnaliser et de stocker des messages spécifiques améliorerait considérablement la fonctionnalité du système.
Pour système sans mémoire
Il est recommandé que le système réserve un port série pour la communication avec le module. Si nécessaire, le module peut être connecté à un ordinateur pour vérifier les informations, l’état et les données de débogage pour analyse.
3 Messages de recommandation
Voici quelques messages personnalisés très pratiques recommandés pour l’intégration de ComNav. Ces messages sont non seulement stockés en mémoire par défaut lors de l’intégration du système, mais servent également de sources d’information précieuses pour les utilisateurs pendant les tests, facilitant le dépannage et la résolution des problèmes.
1 SYSRTS
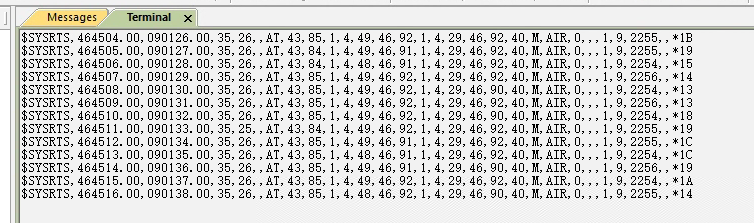
Ce message est conçu pour vérifier les informations du système de manière exhaustive. Il fournit des détails sur l’état du satellite, la qualité du signal, les interférences potentielles, l’occlusion et la qualité du signal de la station de base. Il prend également en charge l’examen des informations à double antenne maître-esclave.
Le message est particulièrement utile dans les environnements avec interférence ou occlusion, il reflète efficacement l’état du module et les conditions environnementales.
Exemple de message SYSRTS :
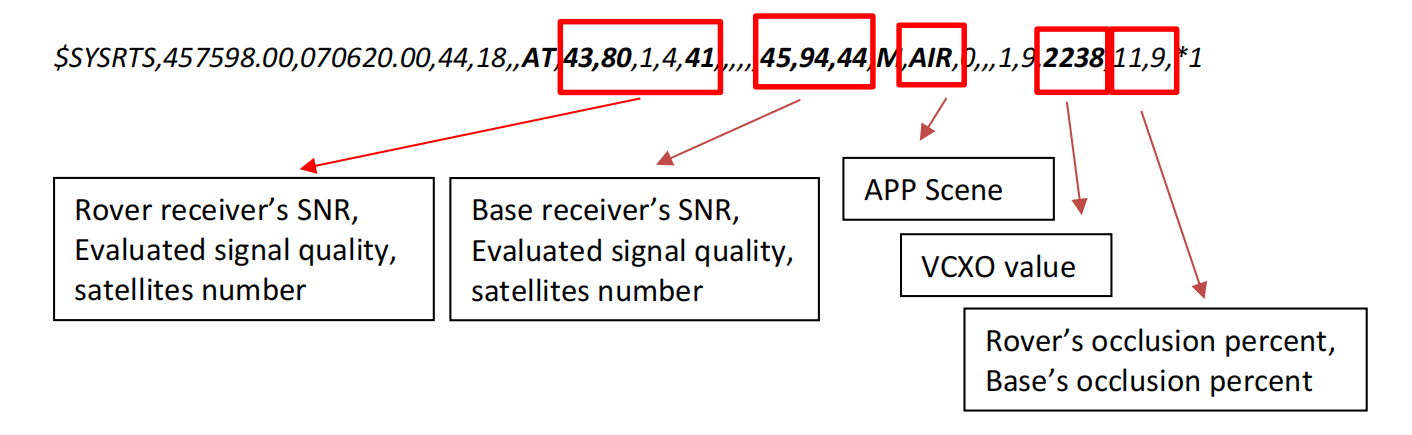
Après le signe « AT », il affiche les informations détaillées sur la qualité du signal pour le rover et le récepteur de base. Et à la fin du message, il donne le pourcentage d’occlusion évalué. Normalement, si la qualité du signal évaluée >85 et le pourcentage d’occlusion<20, le récepteur peut fonctionner avec un repère stable dans l’environnement actuel.
The available mode for APP Scene includes survey, robot, car, air, space, which used for different applications. Please get more information in reference manual:
CNT-OEM-RM001_Rev_2.3_20220507
VCXO value is important for timing. At room temperature, the normal range is 2000 o 2400. If the value not in this range, it may cause “ontime X” ”onchanged” not work.
K803 V610T5
K823 V609GI
2 KSXT
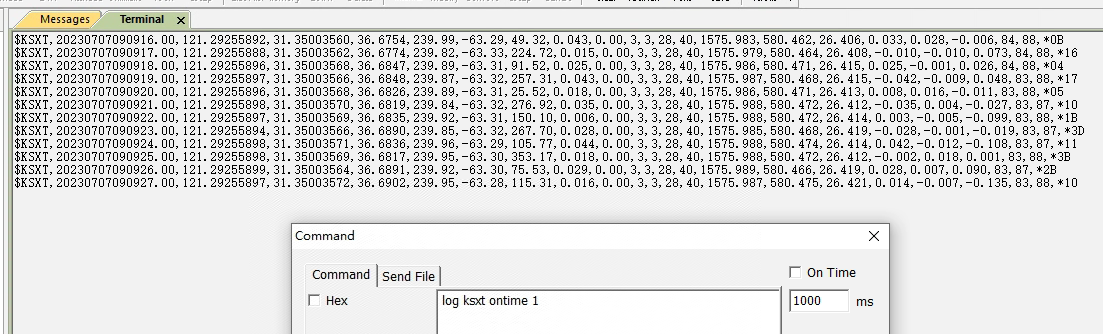
The KSXT message offers positioning, heading, velocity information, as well as the distance to the base station, and signal quality of the master and slave antennas.
It is particularly recommended for dual antenna systems.
Example of KSXT message:
$KSXT,20230707090927.00,121.29255897,31.35003572,36.6902,239.95,-63.28,115.31,
0.016,0.00,3,3,28,40,1575.987,580.475,26.421,0.014,-0.007,-0.135,83,88,*10
Une valeur > 85 est suggérée, pour mieux travailler dans l’environnement actuel.
K823 V609GI
Pour plus de détails sur la définition des messages ci-dessus, veuillez avoir une référence à l’annexe.
4 AppendiceSYSRTS : Vérification de l’état du système en temps réel
Description
Ce message comprend les informations système, les informations de suivi des satellites de la station de base, des stations maître et esclave de Rover et des informations sur l’état opérationnel.
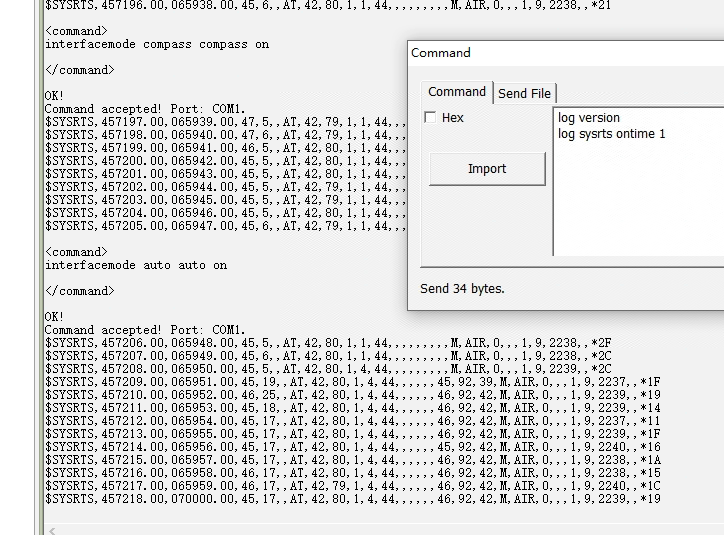
Entrée recommandée | Enregistrer les sysrts à l’heure 1 |
Format pris en charge | ASCII |
Réponse (ASCII)
$SYSRTS,471765.80,110227.80,50,17,,AT,41,86,1,4,47,,,,,,41,85,48,M,SURVEY,0,,,0,9,2172,11,9*6A
| Champ# | Structure | Description | Format | Manifestation |
|---|---|---|---|---|
| 1 | $ SYSRTS | En-tête de journal | $ SYSRTS | |
| 2 | Heure GPS | Heure(s) GPS, correspondant à l’emplacement | ssssss.ss | 471765.80 |
| 3 | Heure UTC | Heure(s) UTC correspondant à l’emplacement | hhmmss.ss | 110227.80 |
| 4 | Utilisation des interruptions | 0~100 (%) | Xx | 50 |
| 5 | Utilisation du processeur | 0~100 (%) | Xx | 17 |
| 6 | Température du processeur | -50~150 (℃) | Xx | |
| 7 | Signe | À | À | |
| 8 | ANT1 SNR | 0~100 (dB) | Xx | 41 |
| 9 | Qualité du signal ANT1 | 0 ~ 100 Dans des environnements dégagés et sans interférences, un score de ≥85 | Xx | 86 |
| 10 | État de l’antenne ANT1 | 0 : Pas de charge, 1 : Normal, 2 : Court-circuit, 3 : Diaphonie | x | 1 |
| 11 | État de positionnement ANT1 | État de la solution 0 : Initialisation, 1 : Individuel 2 : Différentiel de code (y compris la solution SBAS) 4 : Solution fixe RTK 5 : Solution à virgule flottante RTK | x | 4 |
| 12 | ANT1 SVn | Nombre de satellites suivis par ANT1, 0~256 | Xx | 47 |
| 13 | ANT2 SNR | 0 ~ 100 (dB) Remarque : S’il n’y a pas de station esclave, les 4 éléments ci-dessous (14-17) seront vides. | Xx | |
| 14 | Qualité du signal ANT2 | 0 ~ 100 Dans des environnements dégagés et sans interférences, un score de ≥85 | Xx | |
| 15 | État de l’antenne ANT2 | 0 : Pas de charge, 1 : Normal, 2 : Court-circuit, 3 : Diaphonie | x | |
| 16 | Statut de l’en-tête ANT2 | État de la solution 0 : Initialisation 1 : Unique 2 : Différentiel de code (y compris la solution SBAS) 4 : Solution fixe 5 : Solution flottante | x | |
| 17 | ANT2 SVn | Nombre de satellites suivis ANT2, 0~256 | Xx | |
| 18 | Base station SNR | 0~100 (dB) Si les données différentielles de la station de base sont envoyées par paquets, cet élément sera affiché de manière cyclique en fonction de la stratégie de paquets. La « qualité du signal de la station de base » et le « nombre de satellites suivis par la station de base » suivent la même stratégie. | Xx | 41 |
| 19 | Qualité du signal de la station de base | 0 ~ 100 Dans des environnements dégagés et sans interférences, un score de ≥85 | Xx | 85 |
| 20 | Base station SVn | 0 ~ 256 | Xx | 48 |
| 21 | Signe | M | M | |
| 22 | Mode scène | Enquête, Robot, Voiture, Air, Espace | X | Enquête |
| 23 | Indice d’activité ionosphérique | 0 ~ 200 (mm) >50 indique que l’ionosphère actuelle est relativement active | x | 0 |
| 24 | Indication d’interférence | 0 : Aucune interférence, 1 : Interférence détectée | x | |
| 25 | Indication de tromperie | 0 : Aucune interférence, 1 : Interférence détectée | x | |
| 26 | IMU | 0: IMU turned off; 1: IMU turned on, initialization unsuccessful; 2: IMU turned on, initialization successful; 3: IMU turned on, and the orientation estimation using combined state is completed, entering the vehicle kinematic constraint model | x | 0 |
| 27 | System time | 0~9 0: System time not available, 1-8: System time being adjusted, available but unstable, 9: System time stable and available | xx | 9 |
| 28 | VCXO crystal oscillator value | Voltage Controlled Crystal Oscillator (VCXO) value, ranging from 0 to 9999. At room temperature, the normal range is 2000 to 2400. This value decreases with temperature increase and increases with temperature decrease | xxxx | 2172 |
| 29 | Rover station obstruction rate | Obstruction rate = 100% - Tracked satellite count / Theoretical satellite count. The smaller the value, the better the performance | x | 11 |
| 30 | Base station obstruction rate | x | 9 | |
| 31 | Checksum | CheckSum | *hh | *6A |
KSXT: Positioning and heading information
Description
This message includes GNSS receiver information such as time, location, positioning and heading.
Recommended Input | log sysrts ontime 1 |
Supported Format | ASCII |
Reply (ASCII)
$KSXT,20220815021257.00,121.29235950,31.34993419,39.6784,77.93,51.29,50.16,0.001,0.00,1,3,40,
35,,,,0.001,0.001,0.007,71,88,*12
| Field# | Structure | Description | Format | Demonstration |
|---|---|---|---|---|
| 1 | $KSXT | Log header | $KSXT | |
| 2 | utc | UTC time (s) corresponding to the location | yyyy/mm/dd/hh/mm/ss | 20220815021257.00 |
| 3 | Lon | Longitude, in degrees, keep 8 significant digits after the decimal point | xxx.xxxxxxxx | 121.29235950 |
| 4 | Lat | Latitude, in degrees, keep 8 significant digits after the decimal point | xx.xxxxxxxx | 31.34993419 |
| 5 | Height | Altitude, in degrees, keep 4 significant digits after the decimal point | xx.xxxx | 39.6784 |
| 6 | Heading | Azimuth angle (0-360°), keep 2 significant digits after the decimal point | 77.93 | |
| 7 | Pitch | Pitch angle(±90°), keep 2 significant digits after the decimal point | 51.29 | |
| 8 | Track true | True north track angle(0-360°), keep 2 significant digits after the decimal point | 50.16 | |
| 9 | Vel | Velocity: Unit: km/h, keep 3 significant digits after the decimal point | 0.001 | |
| 10 | Roll | Roll angle(±90°), keep 2 significant digits after the decimal point | 0.00 | |
| 11 | Position qual | GNSS positioning quality indicator: 0 = fix not available or invalid 1 = Single-point positioning 2 = RTK float 3 = RTK fixed ambiguity solution | x | 1 |
| 12 | Heading qual | Receiver RTK heading and pitch quality indicator: 0 = fix not available or invalid 1 = Single-point positioning 2 = RTK float 3 = RTK fixed ambiguity solution | x | 3 |
| 13 | #SsolnSVs | Number of satellites that anticipate in calculation of slave station | x | 40 |
| 14 | #MsolnSVs | Number of satellites that anticipate in calculation of master station | x | 35 |
| 15 | Pos East | Coordonnées de la position Est : la position Est dans le système de coordonnées géographiques avec la station de base comme origine, gardez 3 chiffres significatifs après la virgule décimale | xxx.xxx | |
| 16 | Pos nord | Coordonnées de la position nord : la position nord dans le système de coordonnées géographiques avec la station de base comme origine, gardez 3 chiffres significatifs après la virgule décimale | xxx.xxx | |
| 17 | Pos up | Coordonnées de la position zénithale : la position zénithale dans le système de coordonnées géographiques avec la station de base comme origine, gardez 3 chiffres significatifs après la virgule | xxx.xxx | |
| 18 | Vel est | Vitesse d’abscisse : Vitesse d’abscisse dans le système de coordonnées géographiques, gardez 3 chiffres significatifs après la virgule décimale | xxx.xxx | 0.001 |
| 19 | Vel nord | Vitesse d’ordonnée : Vitesse d’ordonnée dans le système de coordonnées géographiques, gardez 3 chiffres significatifs après la virgule Unité : km/h (vide si non disponible) | xxx.xxx | 0.001 |
| 20 | Vel nord | Vitesse zénithale : la vitesse zénithale dans le système de coordonnées géographiques, gardez 3 chiffres significatifs après la virgule Unité : km/h (vide si non disponible) | xxx.xxx | 0.007 |
| 21 | M SNR | Valeur actuelle du rapport porteuse/bruit de l’antenne principale | 95 ~ 100 : Excellent 90 ~ 94 : Bon 85 ~ 89 : Modéré 80 ~ 84 : Passable <80 : Médiocre | Mesures de la qualité des données pour l’antenne principale |
| 22 | Avec le SNR | Valeur actuelle du rapport porteuse/bruit de l’antenne esclave | 95 ~ 100 : Excellent 90 ~ 94 : Bon 85 ~ 89 : Modéré 80 ~ 84 : Passable <80 : Médiocre | Mesures de qualité des données pour l’antenne esclave |
| 23 | *Xx | Somme de contrôle XOR (chaîne hexadécimale, calculée à partir de l’en-tête de trame) | *Hh | *12 |
| 24 | [CR] [LF] | Terminateur de phrase | - | [CR] [LF] |
À propos de ComNav Technology
ComNav Technology développe et fabrique des cartes et des récepteurs GNSS OEM pour les applications de positionnement de haute précision. Sa technologie a déjà été utilisée dans un large éventail d’applications telles que l’arpentage, la construction, le contrôle des machines, l’agriculture, le transport intelligent, le chronométrage précis, la surveillance des déformations, les systèmes sans pilote. Avec une équipe dédiée à la technologie GNSS, ComNav Technology fait de son mieux pour fournir des produits fiables et compétitifs à des clients du monde entier. ComNav Technology a été cotée à la Bourse de Shanghai (Science and Technology Board), valeurs mobilières :ComNav Technology (Compass Navigation), Code boursier : 688592.
À propos de SinoGNSS®
SinoGNSS® est la marque officielle de ComNav Technology Ltd., déposée en République populaire de Chine, dans l’UE, aux États-Unis et au Canada. Toutes les autres marques sont la propriété de leurs propriétaires respectifs.