La magie derrière RTK : offrir une précision de positionnement inégalée

 1 Comprendre RTK (cinématique en temps réel)
1 Comprendre RTK (cinématique en temps réel)
RTK, ou cinématique en temps réel, est une technique de navigation par satellite fondamentalement conçue pour améliorer la précision des données de position obtenues à partir de systèmes de positionnement par satellite tels que GPS, GLONASS, Galileo et BeiDou.
Imaginez que vous êtes sur un vaste champ ouvert, essayant de déterminer votre position à l’aide d’un GPS conventionnel. En règle générale, vous pouvez obtenir une précision de quelques mètres près. Maintenant, introduisez RTK dans la scène, et soudain, vous localisez votre emplacement avec une incroyable précision centimétrique ! Ce saut de précision est réalisé par la capacité unique de RTK à corriger les signaux GPS, se démarquant ainsi des autres méthodes de positionnement.
2 RTK vs PPK : quelle est la différence ?
En plongeant dans le monde de la navigation par satellite de haute précision, vous tomberez forcément sur PPK ou Post-Processed Kinematic. À première vue, RTK et PPK peuvent sembler être des frères et sœurs jumeaux, mais ils ont des différences opérationnelles distinctes.
La distinction la plus importante réside dans le moment de la correction des données :
Ainsi, lorsque vous choisissez entre RTK et PPK, il s’agit de savoir si vous avez besoin d’une précision immédiate au fur et à mesure (RTK) ou si vous êtes d’accord pour collecter d’abord des données et atteindre la précision ensuite (PPK).
3 RTK ConfigurationPour tirer le meilleur parti de la technologie RTK, une configuration correcte est impérative. Le test a été effectué à l’aide d’un module de la série K8. Voici les étapes de configuration recommandées basées sur RTCM3.0/3.2, le format de message standardisé pour la correction différentielle :
Radio Base station--RTCM3.2 MSM4
Here shows commands of RTCM with different format, including RTCM3.0, RTCM3.2 MSM4, RTCM3.2 MSM5.
If use radio modem for data link communication between Base and Rover, as considering limited data size can be sent per second, there suggest use subcontracting strategy for base transmit different constellations.
| RTCM3.0 | For the Base |
|---|---|
| Unlogall | // Clear previous settings |
| Fix position 31.1744880 121.3878091 44.1287 | // Fix the coordinate B, L, H |
| (Fix auto) | // Fix auto |
| Log comX rtcm1004b ontime 1 | // Extended L1, L2 GPS RTK Observables |
| Log comX rtcm1012b ontime 1 | // Extended L1, L2 GLONASS RTK Observables |
| Log comX rtcm1005b ontime 5 | // Base station coordinate |
| Log comX rtcm1033b ontime 10 | // Base station type |
| Saveconfig | // Save configuration |
| RTCM3.2 (MSM4) | For the Base |
|---|---|
| Unlogall | // Clear previous settings |
| Fix position 31.1744880 121.3878091 44.1287 | // Fix the entered coordinate |
| (Fix auto) | // Fix the coordinate automatically |
| Log comX rtcm1074b ontime 1 | // GPS Full PRs and Phase Ranges plus CNR |
| Log comX rtcm1084b ontime 1 | // GLONASS Full PRs and Phase Ranges plus CNR |
| Log comX rtcm1094b ontime 1 | // GALILEO Full PRs and Phase Ranges plus CNR |
| Log comX rtcm1124b ontime 1 | // BeiDou Full PRs and Phase Ranges plus CNR |
| Log comX rtcm1005b ontime 5 | // Base station coordinate |
| Log comX rtcm1033b ontime 10 | // Base station type |
| Saveconfig | // Save configuration |
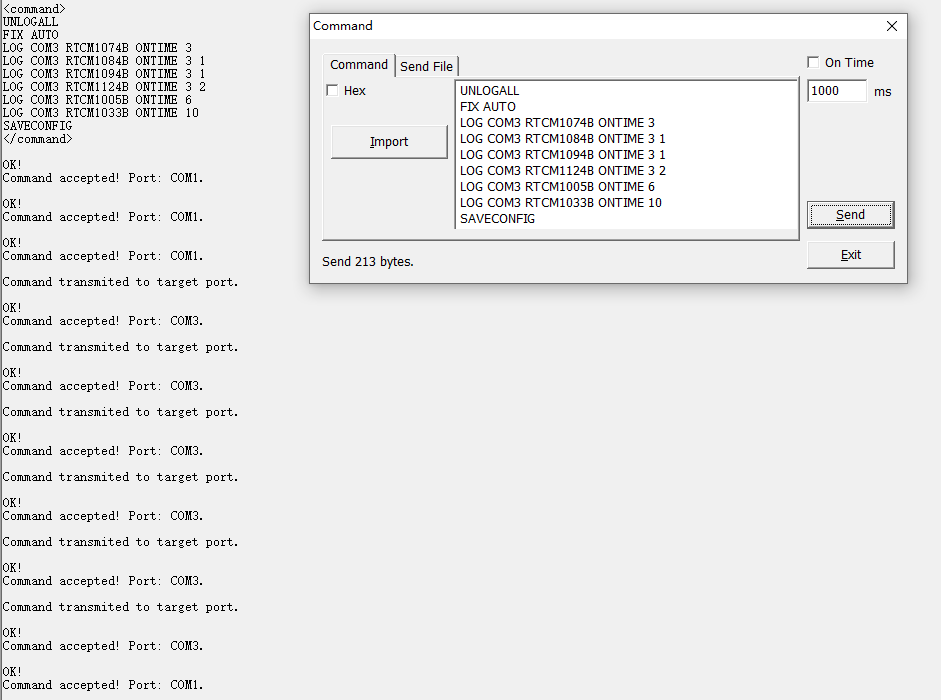
| RTCM3.2 (MSM4)(radio) | For the Base |
|---|---|
| Unlogall | Same as above |
| Fix position 31.1744880 121.3878091 44.1287 | |
| (Fix auto) | |
| Log comX rtcm1074b ontime 3 | |
| Log comX rtcm1084b ontime 3 1 | |
| Log comX rtcm1094b ontime 3 1 | |
| Log comX rtcm1124b ontime 3 2 | |
| Log comX rtcm1005b ontime 6 | |
| Log comX rtcm1033b ontime 10 | |
| Saveconfig |
| RTCM3.2 (MSM5) | For the Base |
|---|---|
| Unlogall | Same as above |
| Fix position 31.1744880 121.3878091 44.1287 | |
| (Fix auto) | |
| Log comX rtcm1075b ontime 1 | |
| Log comX rtcm1085b ontime 1 | |
| Log comX rtcm1095b ontime 1 | |
| Log comX rtcm1125b ontime 1 | |
| Log comX rtcm1005b ontime 5 | |
| Log comX rtcm1033b ontime 10 | |
| Saveconfig |
| RTCM3.2 (MSM5)(radio) | For the Base |
|---|---|
| Unlogall | Same as above |
| Fix position 31.1744880 121.3878091 44.1287 | |
| (Fix auto) | |
| Log comX rtcm1074b ontime 3 | |
| Log comX rtcm1084b ontime 3 1 | |
| Log comX rtcm1094b ontime 3 1 | |
| Log comX rtcm1124b ontime 3 2 | |
| Log comX rtcm1005b ontime 6 | |
| Log comX rtcm1033b ontime 10 | |
| Saveconfig |
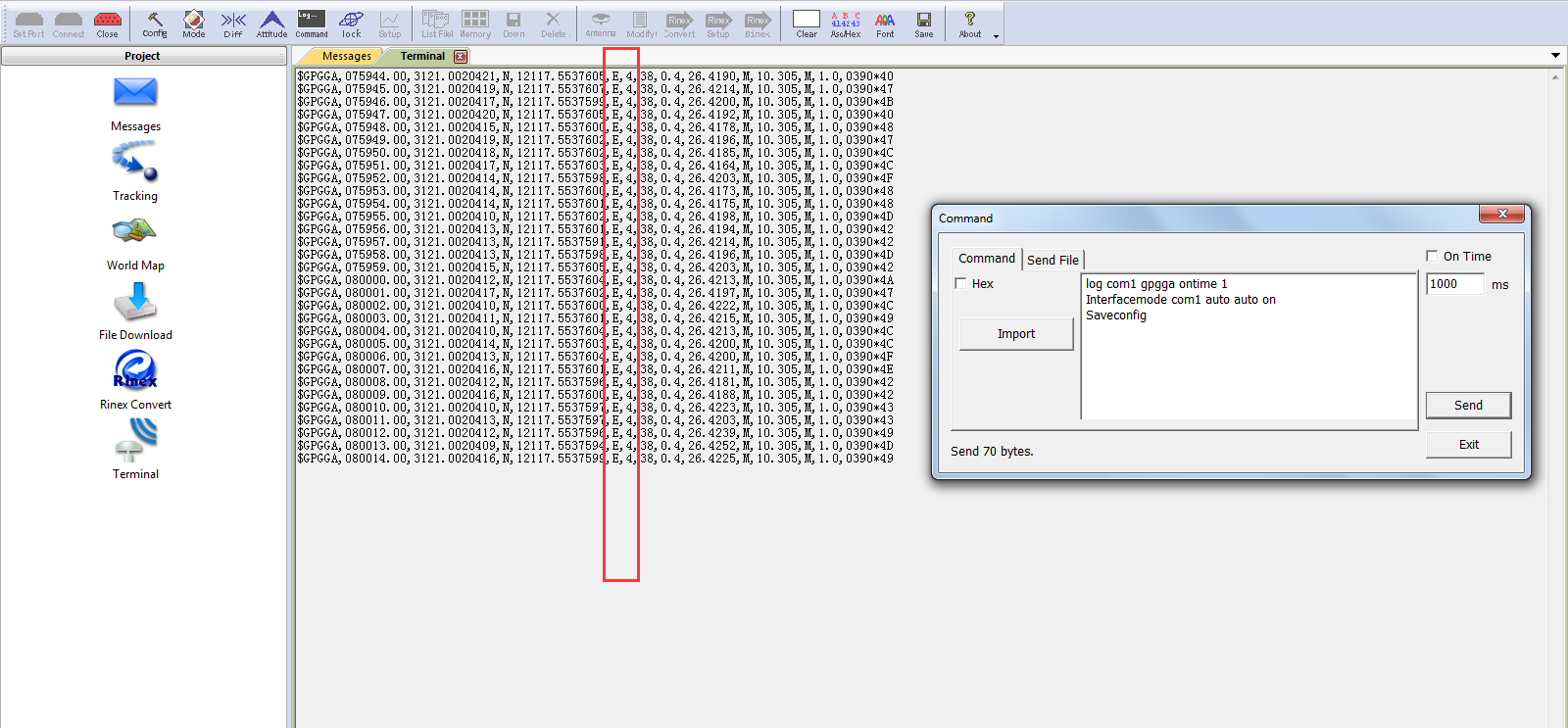
| For the Rover | |
|---|---|
| log comX gpgga ontime 1 | // ComX output GPGGA data |
| Interfacemode comX auto auto on | // Config comX to detect RTCM corrections |
| Saveconfig | // Save configuration |
Tip: If comX is the serial port used for configuration currently, please replace command saveconfig with interfacemode saveconfig.
Upon successful configuration, you can check the OEM board's mode with the `$GPGGA` message. If it's in RTK mode, the solution status should display as “E,4”. $GPGGA,015101.00,3121.0000551,N,12117.5483125,E,4,23,1.1,37.2598,M,0.000,M, 02,0004*58
Rover-RTK fixe
De plus, le paramètre par défaut est le mode enquête, et vous devrez ajuster le mode dynamique correct en fonction de vos applications. Par exemple, l’appareil utilisé pour l’arpentage, vous pouvez utiliser le mode par défaut « arpentage », si l’appareil utilisé sur un robot, vous devrez régler le mode sur « robot ». Dans différents modes, le moteur RTK traite les données d’observation dans un style différent pour promouvoir les performances du moteur RTK. La commande est la suivante :
| DÉFINIR APPSCENE <mode> | enquête/robot/voiture/air/espace |
| Enregistrer la configuration | Enregistrer la configuration |
4 ConclusionÀ propos de ComNav Technology
ComNav Technology développe et fabrique des cartes et des récepteurs GNSS OEM pour les applications de positionnement de haute précision. Sa technologie a déjà été utilisée dans un large éventail d’applications telles que l’arpentage, la construction, le contrôle des machines, l’agriculture, le transport intelligent, le chronométrage précis, la surveillance des déformations, les systèmes sans pilote. Avec une équipe dédiée à la technologie GNSS, ComNav Technology fait de son mieux pour fournir des produits fiables et compétitifs à des clients du monde entier. ComNav Technology a été cotée à la Bourse de Shanghai (Science and Technology Board), valeurs mobilières :ComNav Technology (Compass Navigation), Code boursier : 688592.
À propos de SinoGNSS®
SinoGNSS® est la marque officielle de ComNav Technology Ltd., déposée en République populaire de Chine, dans l’UE, aux États-Unis et au Canada. Toutes les autres marques sont la propriété de leurs propriétaires respectifs.