Introduction de la commande : « log sysconfig »
« Existe-t-il un moyen de visualiser la configuration actuelle de mon module ? » Nous avons rencontré de nombreux clients curieux de connaître la configuration actuelle de la carte OEM SinoGNSS K8, dans l’article d’aujourd’hui, nous présenterons les informations les plus fréquemment utilisées sur la configuration du système. Par la commande « log sysconfig », les clients peuvent vérifier la configuration de base, la configuration rtk et le mode de travail comme PPS, Event et SBAS.
Cette commande convient à la plupart des modules GNSS de la série K8, pour plus d’informations, veuillez visiter le site Web : https://www.comnavtech.com/Products/12.html
Ici montre avec le logiciel ComNav CRU, pour donner la commande « log sysconfig » et ses messages de sortie.
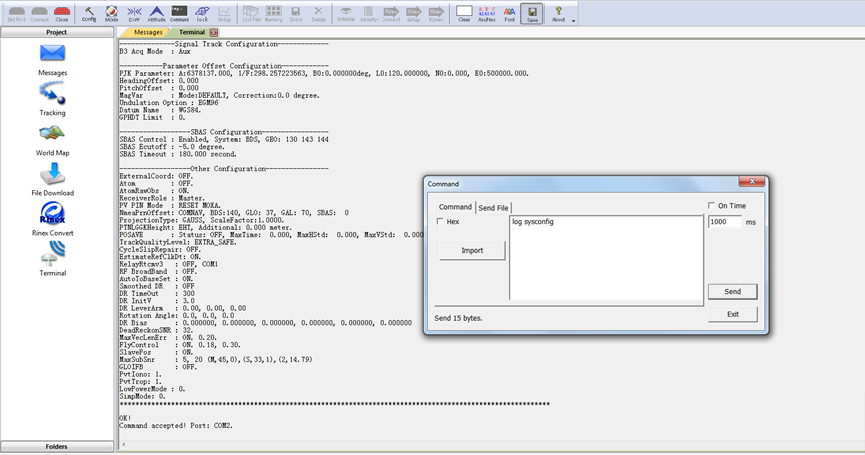
Journal Sysconfig
 1 Configuration de base
1 Configuration de base
Dans la configuration de base, il affiche la configuration du taux de calcul, l’angle de coupe des satellites, les satellites verrouillés et d’autres informations.

● Fréquence du processeur
Dans certains cas, une observation de taux de mise à jour élevé, PVT ou RTK est nécessaire, la fréquence par défaut du cœur du processeur ne pourrait pas supporter une charge de calcul aussi énorme, donc une fréquence élevée est nécessaire, en même temps, cela signifie plus de coût d’énergie.
● Fréquence PVT/PPP/RTK
Le message fait référence au taux de calcul PVT/PPP/RTK.
Dans la carte de la série K8, les paramètres par défaut sont de 5 Hz, si une fréquence de mise à jour PVT supérieure ou inférieure est nécessaire, cette commande peut configurer le taux de mise à jour PVT à 20 Hz maximum.
| SET PVTFREQ Param1 | Param1 est une fréquence PVT valide en Hz : 1, 2, 5 (par défaut), 10, 20 |
| SET RTKFREQ Param1 | Param1 est une fréquence RTK valide en Hz : 1, 2, 5 (par défaut), 10, 20 |
Remarque : la fréquence PVT doit être supérieure à la fréquence RTK.
● Angle de coupe GPS / BD2 / GLO / GAL
Ce message définit l’angle de coupure d’élévation pour le suivi. La carte ne commence pas automatiquement à rechercher un satellite jusqu’à ce qu’elle dépasse l’angle de coupure. Les satellites suivis qui se trouvent en dessous de l’angle de coupure ne sont plus suivis à moins qu’ils n’aient été assignés manuellement.
ECUTOFF 10 | la valeur de l’angle de coupure (-90~90 degrés) |
● Lockouted SVs
Prevent the board from using a satellite system. This message prevents the receiver from using satellites in the specified system in the solution computation.
| LOCKOUTSYSTEM [Param1] | [Param1]: GPS,GLAONASS,GALILEO,BD3,BD2,QZSS |
● CP Smooth PR
A method of combination of CP and PR, to get a higher quality observation.
| SET CPSMOOTHPR [Param1] [Param2] [Param3] | Param1: smooth enable switch, ON/OFF Param2: smooth time constant, range from 10 ~ 200 seconds, default is 50s; Param3: tracking time threshold, range from 0 ~ 60 seconds, default is 15s. |
● Smoothed PVT
In single-point positioning, ComNav Technology have adopted an advanced smoothing filter to enhance pass to-pass accuracy, which need send commands as:
| Set smoothedpvt on | Enable smooth mode |
| Saveconfig | Save configuration |
● Contrôle INS
Le mode INS (système de navigation inertielle) permet aux modules OEM de transmettre en continu des informations de positionnement via l’IMU en peu de temps lorsqu’ils perdent le signal satellite.
ACTIVER : INS activé ; DÉSACTIVER : INS désactivé
1/2/3/4/5/6/7/8: IMU axes type
En ce qui concerne la configuration de l’IMU, vous pouvez vous référer au blog « Comment activer le système GNSS+INS sur les modules de la série K8 » par lien : https://www.comnavtech.com/blogs_details/3.html
● CWI1/CWI2
Les modules OEM K8 prennent en charge deux canaux pour l’anti-interférence active, il fait référence à CWI1 et CWI2. Les clients peuvent activer CWI en mode automatique ou sélectionner manuellement les canaux. Les détails peuvent se référer à la liste des commandes OEM de ComNav : CNT-OEM-RM001_Rev_2.3_20220507
| SET CWI AUTO Param1 | Param1 : 0 : désactivé, par défaut 1 : Canal 1 allumé 2 : Canal 2 allumé 3 : canaux 1 et 2 allumés |
| SET CWI MANUAL Param1 Param2 Param3 | Param1 : 1/2/3/4/5/6/7/8/9/10 Paramètre 2 : 0/1 Paramètre 3 : 0/1 |
2 Configuration RTK
Cette partie est le schéma de traitement du récepteur pour RTK et les informations sur l’état de fonctionnement actuel.

● Délai d’attente RTK
Cette commande est utilisée pour définir l’âge maximal des données RTK à utiliser en tant que station de rover. Les données RTK reçues qui sont antérieures à l’heure spécifiée sont ignorées.
Après que rtk ait déconnecté le différentiel, après 200 secondes, il quittera l’état fixe.
| RTKTIMEOUT [délai] | Délai : moins de 200 s, par défaut 200 s |
● RTKFIXHOLDTIME
Cette commande est utilisée pour définir l’âge maximum des données fixes RTK à utiliser lors de l’exploitation d’une station de rover. Les données fixes RTK reçues qui sont antérieures à l’heure spécifiée sont ignorées.
| RTKFIXHOLDTIME [délai] | Délai : moins de 200 s et plus de 5 s, la valeur par défaut est de 20 s |
● RtkSourceType
Cette commande permet d’identifier à partir de quelle station de base accepter les corrections différentielles RTK. Ceci est utile lorsque le récepteur reçoit des corrections de plusieurs stations de base.
| RTKSOURCE <type> [stn id] | type : AUTO/RTCMV3 Numéro d’identification STN : --AUTO : TOUT --RTCMV3 : 0 <= ID de la station RTCMV3 <=4095 ou ANY |
● RtkRefStnType
Cette commande définit la valeur de l’ID de la station pour le récepteur lorsqu’il transmet des corrections. Cela permet d’identifier facilement la station de base qui était la source des données.
| DGPSTXID <type> <ID> | type : AUTO/RTCMV3 Numéro d’identification STN : --AUTO : TOUT --RTCMV3 : 0 <= ID de la station RTCMV3 <=4095 ou ANY |
● Scène de l’application
Cette commande peut être utilisée pour définir le mode d’application. Dans différents modes, le moteur RTK doit traiter différents styles de données d’observation pour améliorer les performances du moteur RTK.
Par exemple, si vous utilisez la série ComNav K8 comme module GPS de drone, le mode APP Scene sera configuré pour diffuser.
| DÉFINIR APPSCENE <mode> | Mode : enquête/robot/voiture/air/espace |
| Enregistrer la configuration | Enregistrer la configuration |
D’autres options sont suggérées à conserver par défaut.
3 Configuration COM
Ce message indique l’état (mode normal ou mode différentiel) de tous les ports COM.

Pour plus de détails, veuillez consulter le blog :
https://www.comnavtech.com/blogs_details/8.html
4 Configuration PPS
PPS, qui signifie « Pulse Per Second », est un signal de synchronisation précis souvent utilisé dans diverses applications qui nécessitent une synchronisation temporelle précise.

Avec la fonction PPS, vous pouvez régler la polarité, la période et la largeur d’impulsion de la sortie PPS.
Format : PPSCONTROL <commutateur> <polarité> <période> <largeur-impulsion>
| PPScontrol Enable positif 1 1000 | Définir PPS comme impulsion de haut niveau avec une largeur de 1 ms par seconde |
| Enregistrer la configuration | Enregistrer la configuration |
● <commutateur> prend en charge « activer » ou « désactiver », notez que « désactiver » n’est pas valide.
● <polarité> prend en charge « positif » et « négatif », « positif » signifie mode impulsion de haut niveau et « négatif » signifie mode impulsion de bas niveau.
● <période> en secondes, la fréquence de mise à jour peut aller jusqu’à 10 Hz.
● <largeur d’impulsion> en microsecondes, la largeur d’impulsion doit être inférieure à la moitié de la période.
5 Configuration de l’événement
Événement fait référence à un événement, une action ou un incident important qui déclenche une réponse ou un changement dans l’état du système. Les événements peuvent être à la fois planifiés et spontanés, et ils sont souvent utilisés pour capturer et gérer des moments importants au sein d’un système.

Format : MARKCONTROL <commutateur > < signal > [polarité] [polarisation] [timeguard]]
| markcontrol mark1 activer négatif 0 0 | Ouvrir le marqueur Event1 |
| Onyu dans log marktime | Heure de l’événement d’entrée de marque |
| Log markposa onnew | Position au moment de l’événement d’entrée de marque |
| Enregistrer la configuration | Enregistrer la configuration |
● <signal> prend en charge les mots clés « mark1 » et « mark2 ».
● <switch> prend en charge les mots clés « activer » et « désactiver ».
● [polarité] prend en charge les mots clés « positif » et « négatif », qui représentent séparément « impulsion positive » et « impulsion négative ».
● [biais temporel] Un biais temporel constant en nanosecondes peut être appliqué à chaque impulsion d’événement. En général, cela est utilisé pour tenir compte d’un retard de transmission.
●
[Garde de temps] Le garde de temps spécifie le nombre minimum de millisecondes entre les impulsions. Ceci est utilisé pour filtrer grossièrement les impulsions d’entrée.
6 Configuration PVT
Pour la configuration PVT, paramètres normalement utilisés pour le débogage R&D.

7 Configuration du décalage des paramètres
Dans cette section, il fournit des paramètres pour la référence et une certaine valeur de décalage.

● Paramètre PJK : A :6378137.000, 1/F :298.257223563, B0:0.0000000deg, L0:120.000000, N0:0.000, E0:500000.000.
| SET PJKPARA Param1... Param6 | Param1... Param6 : 1) A : le long essieu de la terre 2) 1 / F : F est le taux plat de la Terre 3)B0 : latitude de référence (en degrés) 4)L0 : longitude de référence (en degré) 5)N0 : coordonnée nord de référence 6) E0 : coordonnée est de référence |
● HeadingOffset
Cette commande est utilisée pour ajouter un décalage en degré dans les valeurs de cap et de hauteur des journaux HEADING, GPHDT, GPNAV, GPTRA, GPYBM et PTNL, AVR.
Le décalage de cap et le décalage de tangage ont tous deux des valeurs par défaut de 0 degré.
HEADINGOFFSET<headingoffsetindeg><pitchoffsetindeg> | Valeur de décalage de cap, plage de -180.0~+180.0° ;; Valeur de décalage de hauteur, plage de -90.0~+90.0° ;. |
8 Configuration du SBAS
La série SinoGNSS K8 prend en charge la fonction SBAS, veuillez vous référer au blog « Comment démarrer avec le mode SBAS ? » par lien : https://www.comnavtech.com/blogs_details/1.html

9 Autre configuration

● IMU (INS)
DR lissé : OFF // Délai de dilution DR de lissage INS : 300 // Temps de maintien INS
DR InitV : 3.0 // Vitesse d’initialisation de la navigation inertielle
DR LeverArm : 0,00, 0,00, 0,00 // Valeur du bras INS
En ce qui concerne la configuration de l’IMU, vous pouvez vous référer au blog « Comment activer le système GNSS+INS sur les modules de la série K8 » par lien : https://www.comnavtech.com/blogs_details/3.html
● PPP
Source PPP : B2b //B2b/HAS/RTCM commutable
CoordSys PPP : ITRF //ITRF/WGS84 commutable
Contactez ComNav pour connaître la dernière version du micrologiciel PPP-HAS/B2b.
Les paramètres qui ne sont pas explicitement mentionnés sont considérés comme réservés ou ne peuvent pas être divulgués au public.
À propos de ComNav Technology
ComNav Technology développe et fabrique des cartes et des récepteurs GNSS OEM pour les applications de positionnement de haute précision. Sa technologie a déjà été utilisée dans un large éventail d’applications telles que l’arpentage, la construction, le contrôle des machines, l’agriculture, le transport intelligent, le chronométrage précis, la surveillance des déformations, les systèmes sans pilote. Avec une équipe dédiée à la technologie GNSS, ComNav Technology fait de son mieux pour fournir des produits fiables et compétitifs à des clients du monde entier. ComNav Technology a été cotée à la Bourse de Shanghai (Science and Technology Board), valeurs mobilières :ComNav Technology (Compass Navigation), Code boursier : 688592.
À propos de SinoGNSS®
SinoGNSS® est la marque officielle de ComNav Technology Ltd., déposée en République populaire de Chine, dans l’UE, aux États-Unis et au Canada. Toutes les autres marques sont la propriété de leurs propriétaires respectifs.